1. Introduction
Semantic segmentation is an important computer vision task [
1,
2,
3] with applications in autonomous driving [
4], human–machine interaction [
5], computational photography [
6], and image search engines [
7]. The significance of semantic segmentation, in both the development of novel architectures and its practical use, has motivated the development of several approaches that aim to improve the encouraging initial results of Fully Convolutional Networks (FCN) [
8]. One important challenge to address is the decrease of the feature map size due to pooling, which requires unpooling to perform pixel-wise labeling of the image for segmentation.
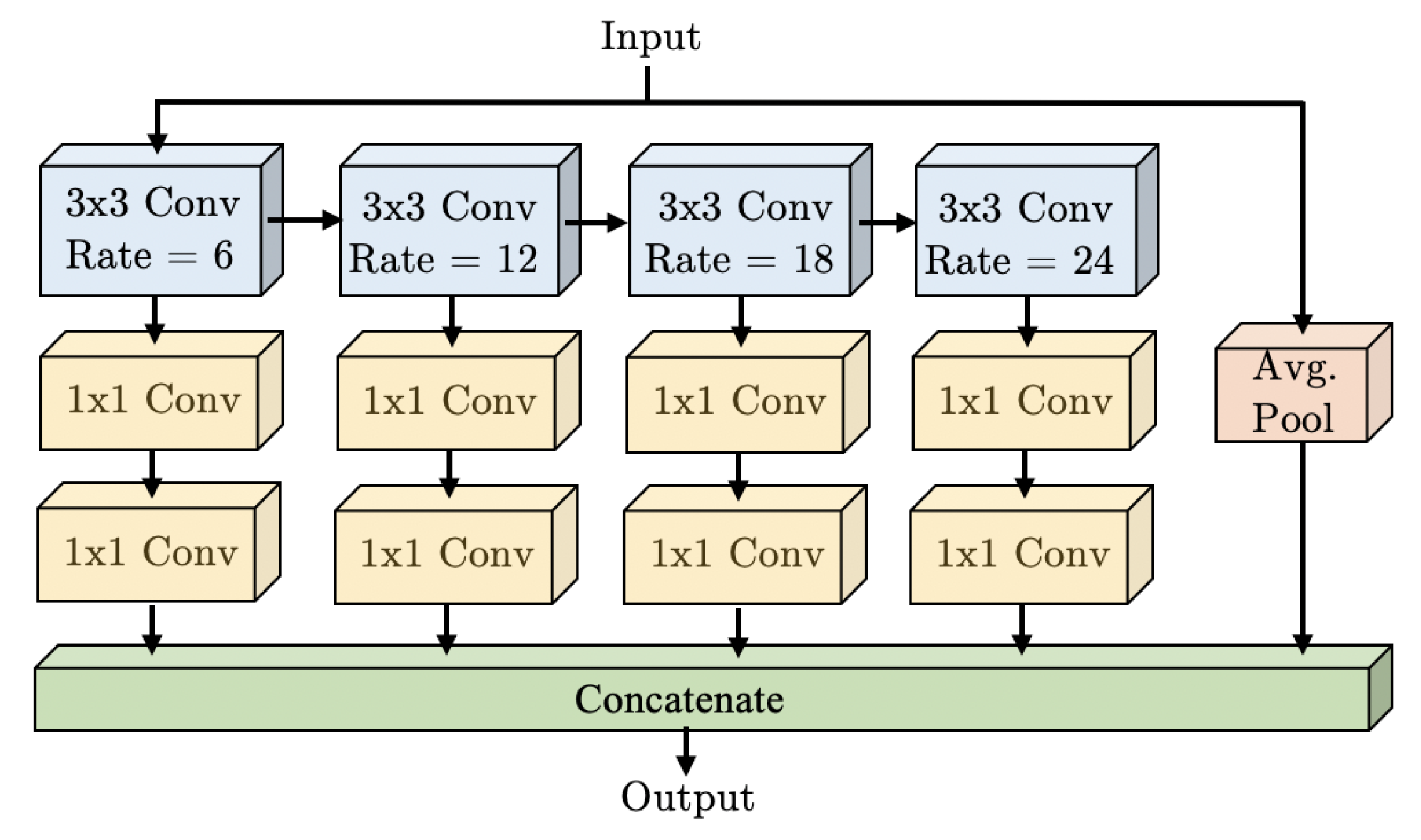
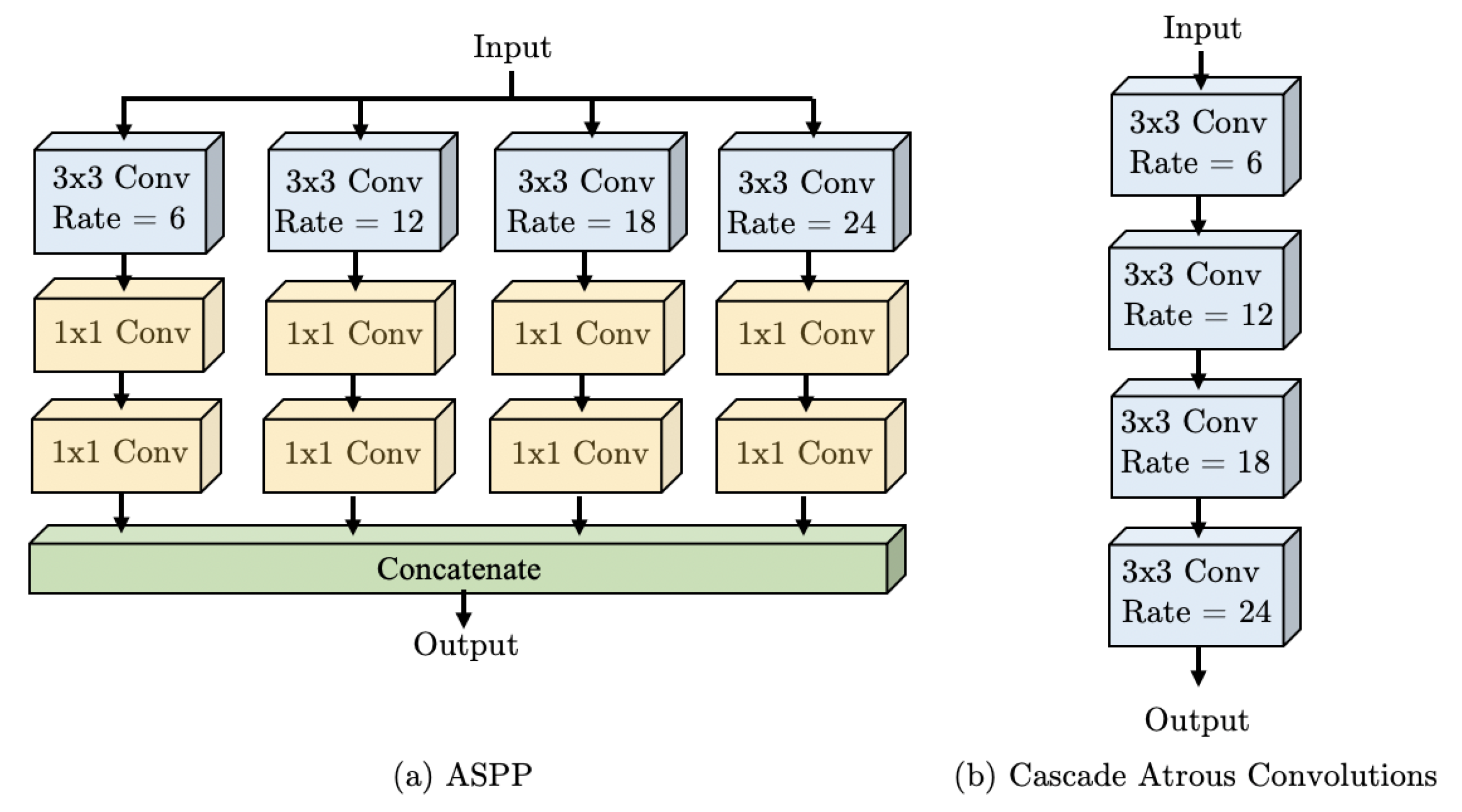
DeepLab [
9], for instance, used dilated or Atrous Convolutions to tackle the limitations posed by the loss of resolution inherited from unpooling operations. The advantage of Atrous Convolution is that it maintains the Field-of-View (FOV) at each layer of the network. DeepLab implemented Atrous Spatial Pyramid Pooling (ASPP) blocks in the segmentation network, allowing the utilization of several Atrous Convolutions at different dilation rates for a larger FOV.
A limitation of the ASPP architecture is that the network experiences a significant increase in size and memory required. This limitation was addressed in [
10], by replacing ASPP modules with the application of Atrous Convolutions in series, or cascade, with progressive rates of dilation. However, although this approach successfully decreased the size of the network, it presented the setback of decreasing the size of the FOV.
Motivated by the success achieved by a network architecture with parallel branches introduced by the Res2Net module [
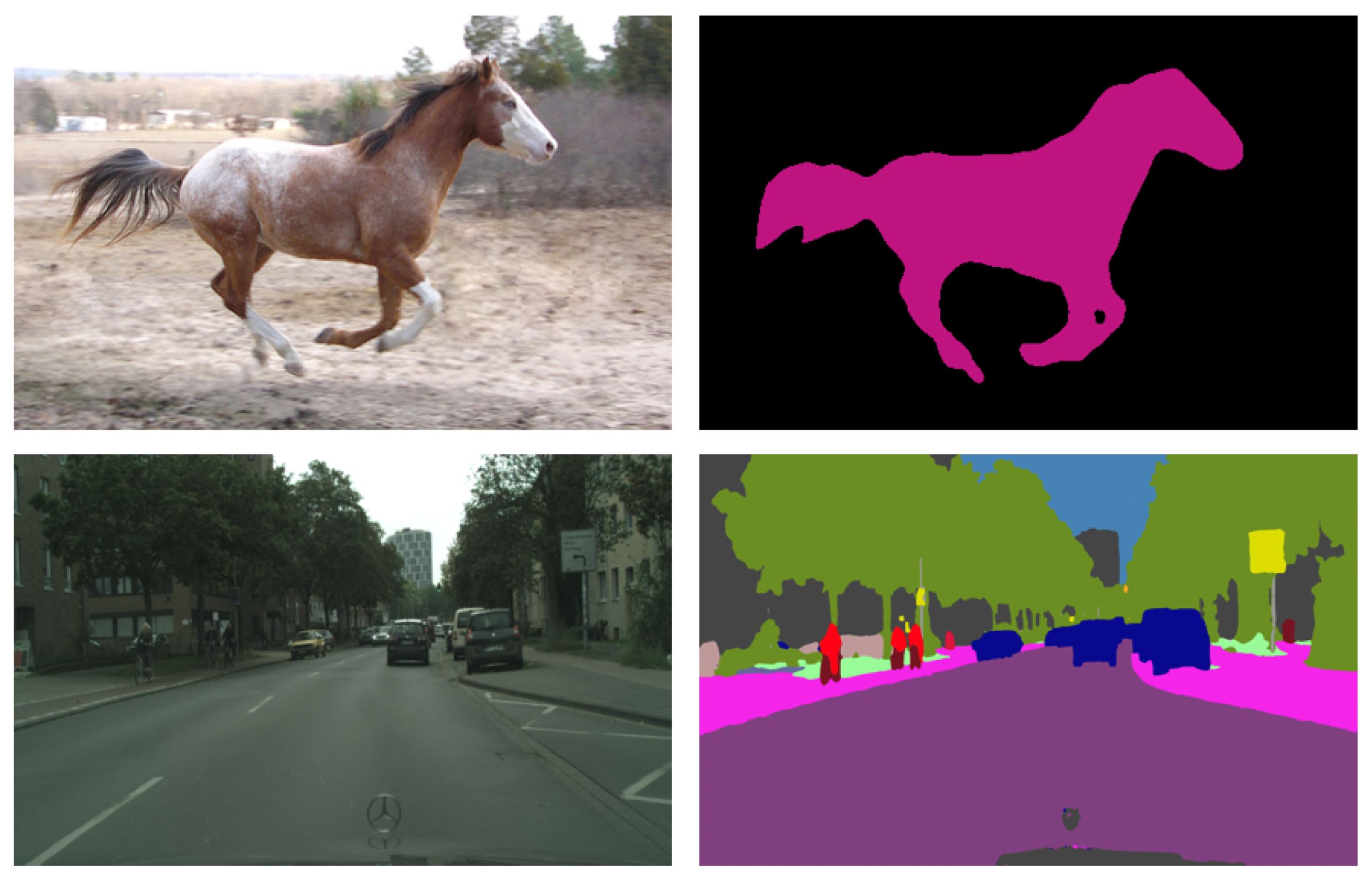
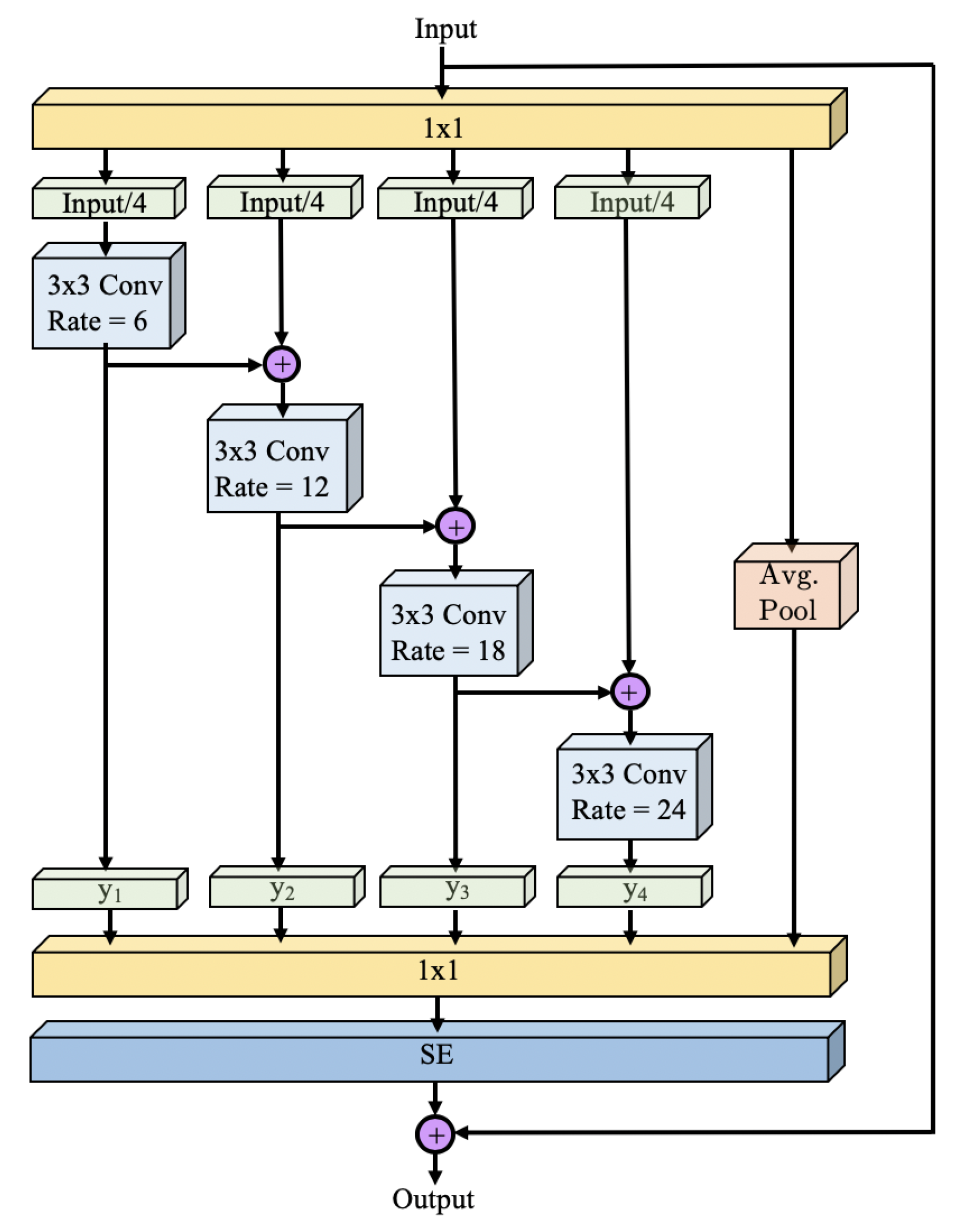
11], we incorporate Res2Net blocks in a semantic segmentation network. Then, we propose a novel architecture named the Waterfall Atrous Spatial Pooling (WASP) and use it in a semantic segmentation network we refer to as WASPnet (see segmentation examples in
Figure 1). Our WASP module combines the cascaded approach used in [
10] for Atrous Convolutions with the larger FOV obtained from traditional ASPP in DeepLab for the deconvolutional stages of semantic segmentation.
The WASP approach leverages the progressive extraction of larger FOV from cascade methods, and is able to achieve parallelism of branches with different FOV rates while maintaining reduced parameter size. The resulting architecture has a flow that resembles a waterfall, which is how it gets its name.
The main contributions of this paper are as follows.
We propose the Waterfall method for Atrous Spatial Pooling that achieves significant reduction in the number of parameters in our semantic segmentation network compared to current methods based on the spatial pyramid architecture.
Our approach increases the receptive field of the network by combining the benefits of cascade Atrous Convolutions with multiple fields-of-view in a parallel architecture inspired by the spatial pyramid approach.
Our results show that the Waterfall approach achieves state-of-the-art accuracy with a significant reduction in the number of network parameters.
Due to the superior performance of the WASP architecture, our network does not require postprocessing of the semantic segmentation result with a CRF module, making it even more efficient in terms of computational complexity.
5. Results
Following training, validation, and testing procedures, the WASPnet architecture was implemented utilizing WASP module, Res2Net-Seg module, or ASPP module. The validation mIOU results are presented in
Table 1 for the Pascal VOC dataset. When following similar guidelines as in [
9] for training and hyperparameters, and using the WASP module, an mIOU of 80.22% is achieved without the need for CRF postprocessing. Our WASPnet resulted in a gain of 5.07% on the validation set and reduced the number of parameters by 20.69%.
The Res2Net-Seg approach results in an mIOU of 78.53% without CRF, achieves mIOU of 80.12% with CRF, and reduces the number of parameters by 14.99%. The Res2Net-Seg approach still shows benefits with the incorporation of CRF as postprocessing, similar to the cascade and ASPP methods.
Overall, the WASP architecture provides the best result and the highest reduction in parameters. Sample results for the WASPnet architecture are shown in
Figure 9 for validation images from the Pascal VOC dataset [
41]. Note, from the generated segmentation, that our method presents a better definition in the detection shape, being closer to the ground-truth when compared to previous methods utilizing ASPP (DeepLab).
We tested the effects of different dilation rates (in our WASP module) on the final segmentation. In our tests, all kernel sizes were set to 3 following procedures as in [
9].
Table 2 reports the accuracy, in mIOU, for the Pascal VOC dataset for different dilation rates in the WASP module. The configuration with dilation rates of {6, 12, 18, 24} resulted in the best accuracy for the Pascal VOC dataset, therefore, the following tests were conducted using this dilation rate.
We also experimented with postprocessing using CRF. The application of CRF has the benefit of better defining the shapes of the segmented areas. Similarly to the procedures followed in [
9], we performed parameter tuning, for the parameters of Equation (
3), by varying
between 3 and 6,
from 30 to 100, and
from 3 to 6, while fixing both
and
to 3.
The addition of CRF postprocessing to our WASPnet method resulted in a modest increase of 0.2% in the mIOU for both the validation and test sets of the Pascal VOC dataset. The gains from using CRF are less significant than those in [
9], due to more efficient use of FOV by WASPnet. The effects of CRF on accuracy were not consistent across different classes. Classes with objects that do not have extremities, such as bottle, car, bus, and train, benefited most, whereas there was a decrease in accuracy for classes with more delicate boundaries such as bicycle, plant, and motorcycle.
Results on the testing Pascal VOC dataset are shown in
Table 3. The additional training dataset column refers to DeepLabv3 types of models where a ResNet-101 model was pretrained on both ImageNet [
21] and JFT-300M [
22] when performing the test challenge for Pascal VOC. JFT-300M consists of Google’s internal dataset of 300 million images labeled in 18,291 categories, and therefore these results cannot be compared directly to other external architectures including this work. The addition of the JFT dataset for training allows the architecture to achieve performance improvements that are not possible without the such a large number of training samples. Note that training of the WASPnet network was performed only on the training dataset provided by the challenge, consisting of 1464 images. Based on these results, WASPnet outperforms all of the other methods that are trained on the same dataset.
WASPnet was also used with the Cityscapes dataset [
42] following similar procedures.
Table 4 shows the results obtained for Cityscapes, resulting in an mIOU of 74.0%, a gain of 4.2% from [
9]. The Res2Net-Seg version of the network achieved 72.1% mIOU.
For both WASP and Res2Net-Seg architectures tested on the Cityscapes dataset, the CRF postprocessing did not have much benefit. A similar result was found with DeepLab where CRF resulted in a small improvement of the mIOU. The higher resolution and shape of detected instances in the Cityscapes dataset likely affected the effectiveness of the CRF. With Cityscapes, we used a batch size of 4 due to hardware constraints during training; other architectures have used batch sizes of up to ten.
Table 5 shows the results of WASPnet on the Cityscapes testing dataset. WASPnet achieved mIOU of 70.5% and outperformed other architectures trained on the dame dataset. We only performed training on the fine annotation images from the Cityscapes dataset, containing 2975 images, whereas the DeepLabv3 style architectures used larger datasets for training, such as JFT-300M containing 300 million images for pre-training and and coarser dataset from Cityscapes containing 20,000 images.
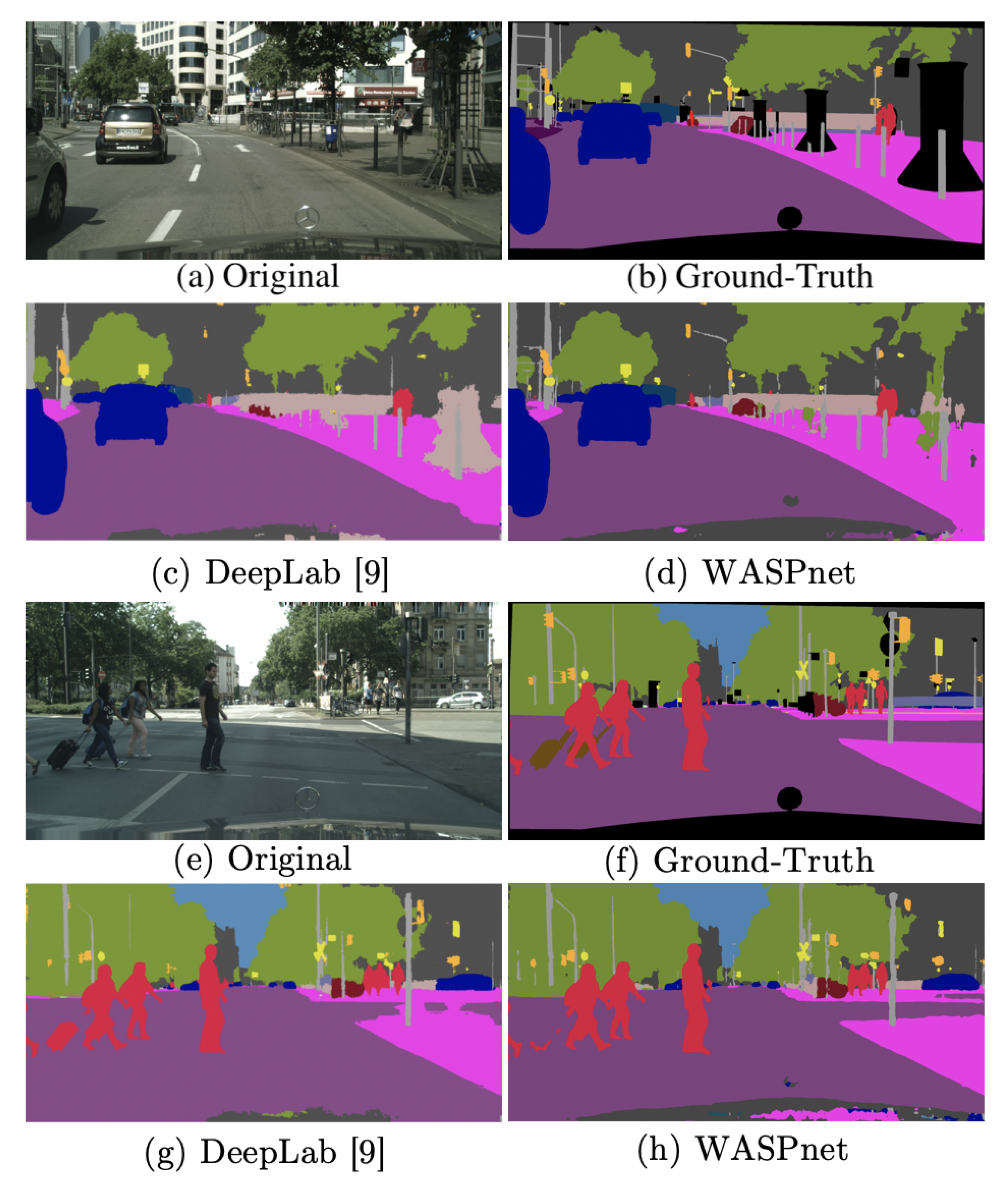
Figure 10 shows examples of Cityscapes image segmentations with the WASPnet method. Like our observations from the Pascal VOC dataset, our method produces better defined shapes for the segmentation compared to DeepLab. Our results are closer to the ground-truth data, and show better segmentation of smaller objects that are further away from the camera.
Our results in
Table 4 illustrate that postprocessing with CRF slightly decreased the mIOU by 0.8% in the Cityscapes dataset: CRF has difficulty dealing with delicate boundaries, which are common in the Cityscapes dataset. With WASPnet, the presence of larger FOV due to the WASP module is able to offset the potential gains of the CRF module from previous networks. An additional limitation is that CRF requires substantial extra time for processing. For these reasons, we conclude that WASPnet can be used without CRF postprocessing.
Fail Cases
Classes that contain more delicate, and consequently harder to accurately detect, shapes contribute the most to segmentation errors. Particularly, tables, chairs, leaves, and bicycles present a bigger challenge to segmentation networks. These classes also resulted in a lower accuracy when applying CRF. Representative examples of fail cases are shown in
Figure 11 for classes chair and bicycle, which are the most difficult to segment. Even in these cases, WASPnet (without CRF) is able to better detect the general shape compared to DeepLab.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}