An Orthogonal Weighted Occupancy Likelihood Map with IMU-Aided Laser Scan Matching for 2D Indoor Map**


Abstract
:1. Introduction
2. Methods
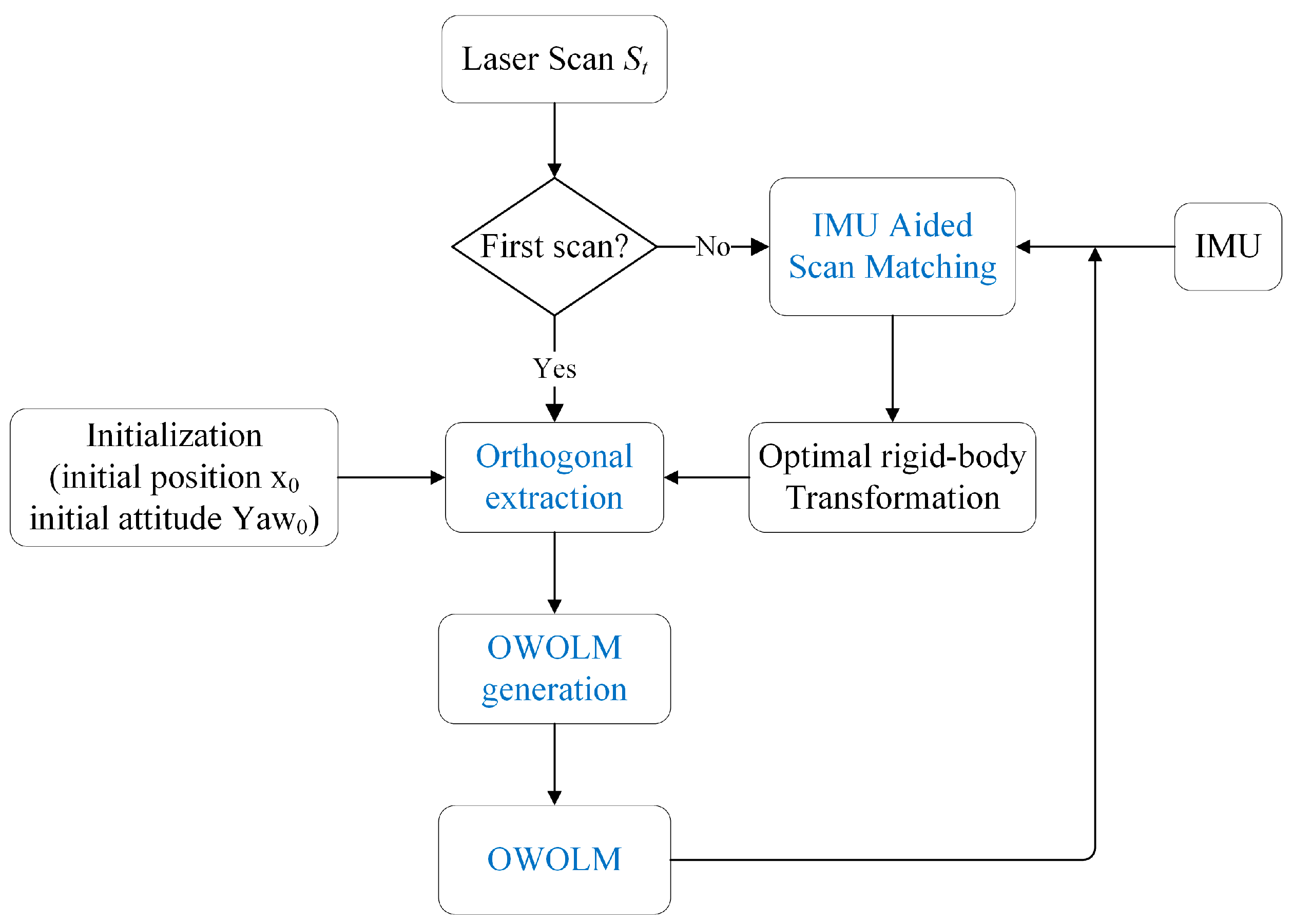
2.1. Algorithm Overview
2.2. IMU-aided Scan-to-Map Matching
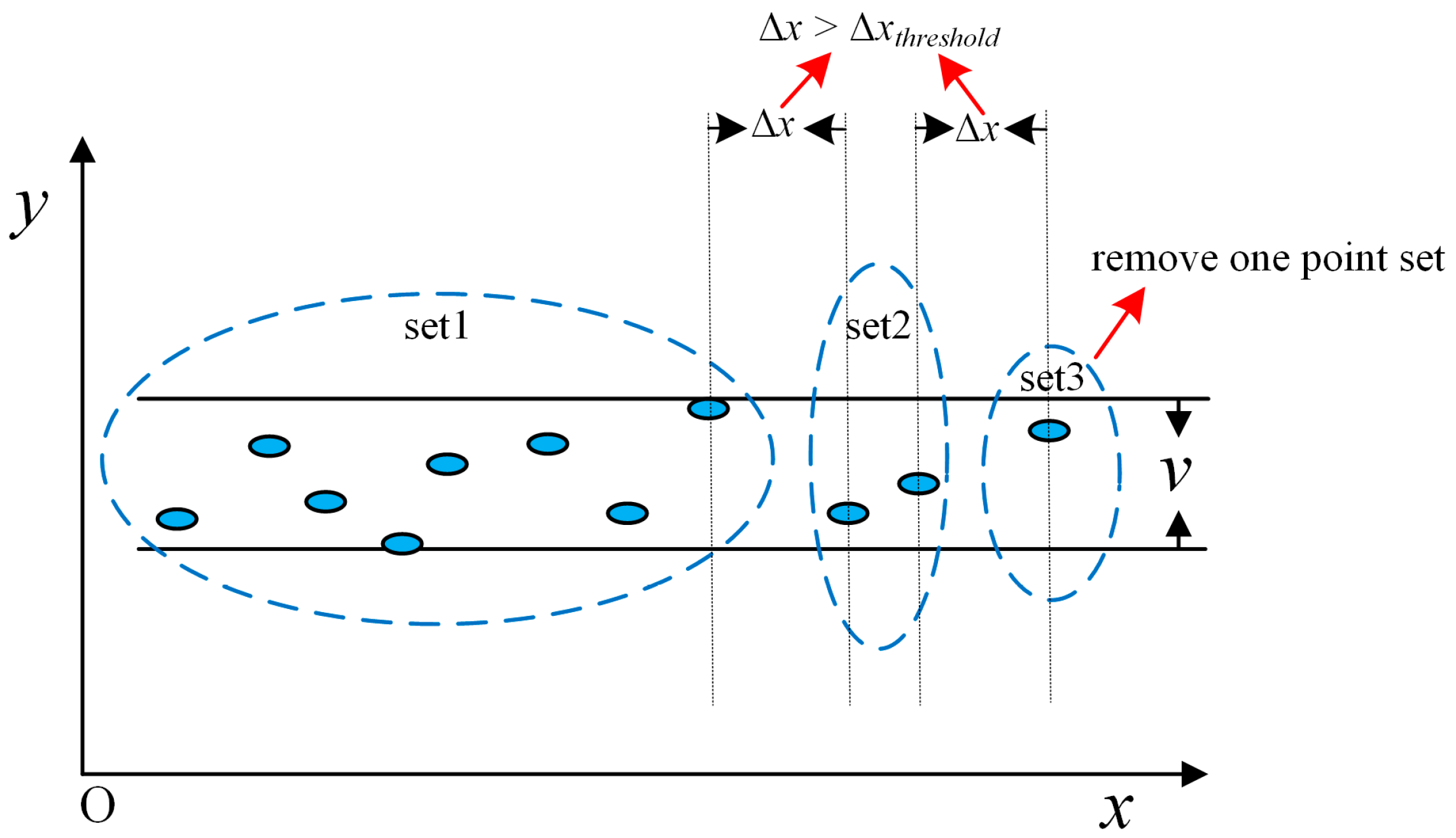
2.3. Orthogonal extraction by blurred segments
| Algorithm 1: Pseudo-code of OBS extraction, where OBSs are parallel to x coordinate axe |
| Requires: 1. Coordinates (x, y) of scan points 2. Width v of OBS 3. Minimum number n of points in OBS 4. Minimum length l of OBS, which is 1 in this paper 5. Maximum distance between the adjacent points in OBS Δxthreshold sort the scan points according to the y-coordinates in ascending order for each point with y-coordinates y collect the set of points in the y-coordinates between y and y + v end for Find the set with the maximum number N of points if N > n sort the set of points according to the x-coordinates in ascending order split the set if the adjacent x-coordinates Δx >Δxthreshold else exit the loop end if for each set if the length > l save this set of points remove the point from the scan points end if end for |
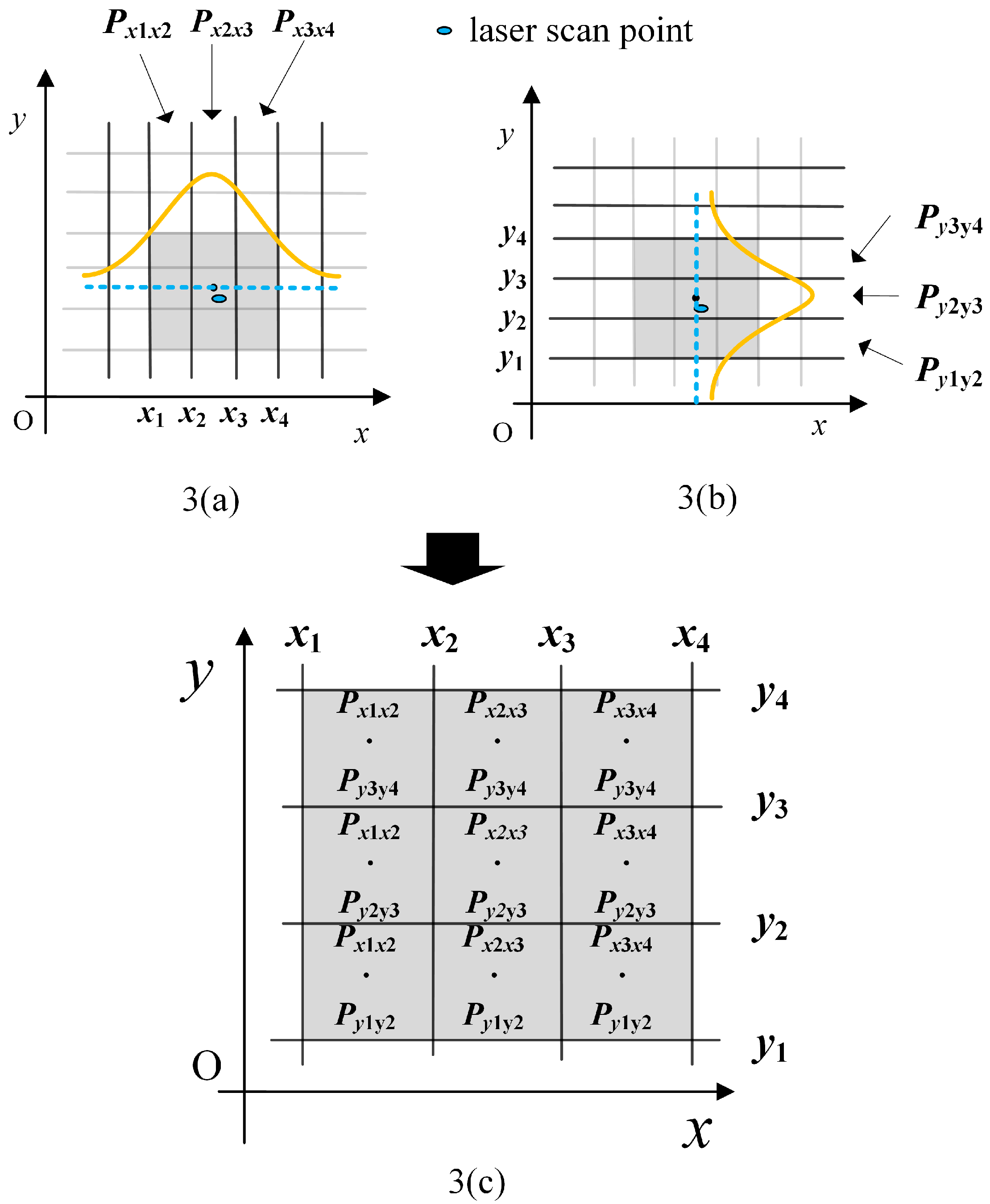
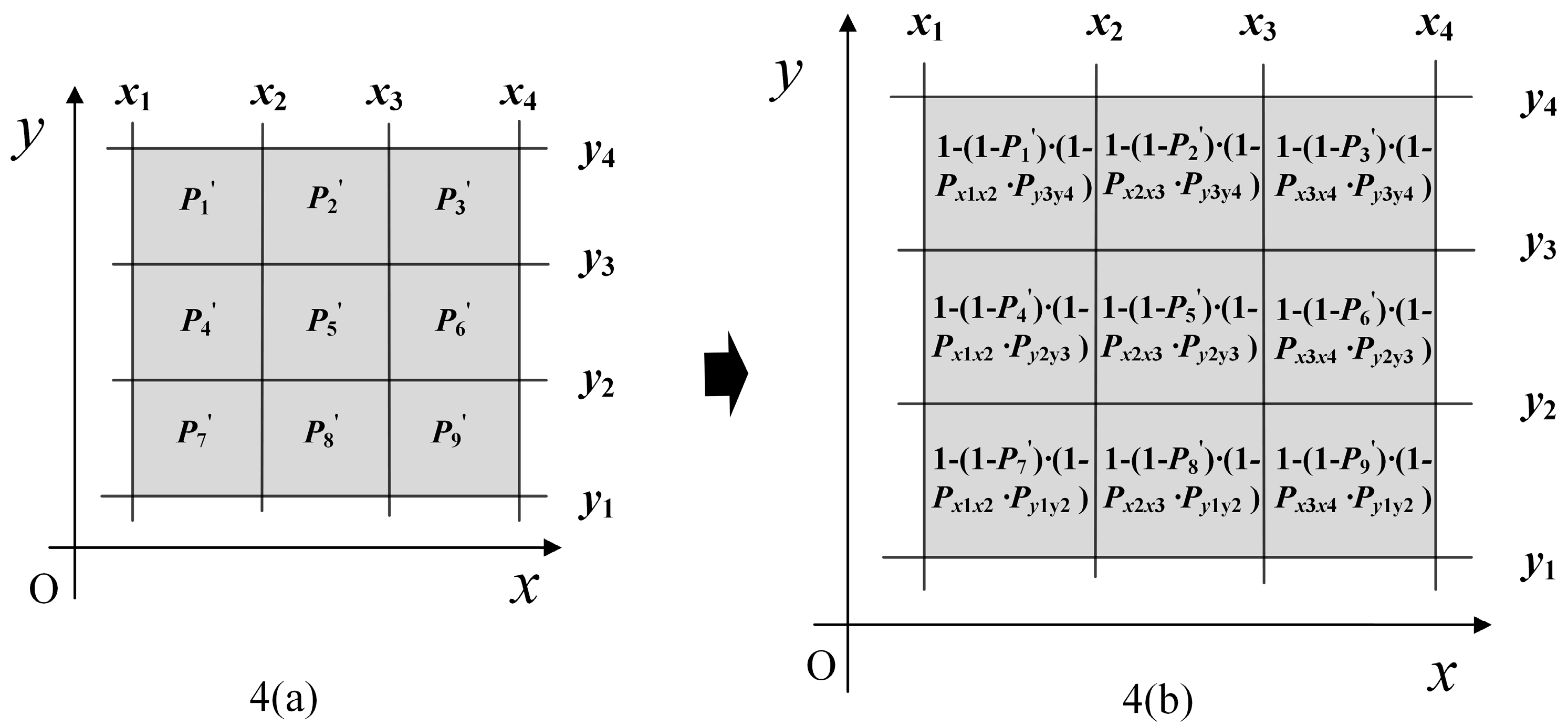
2.4. OWOLM Generation
3. Experimental Results
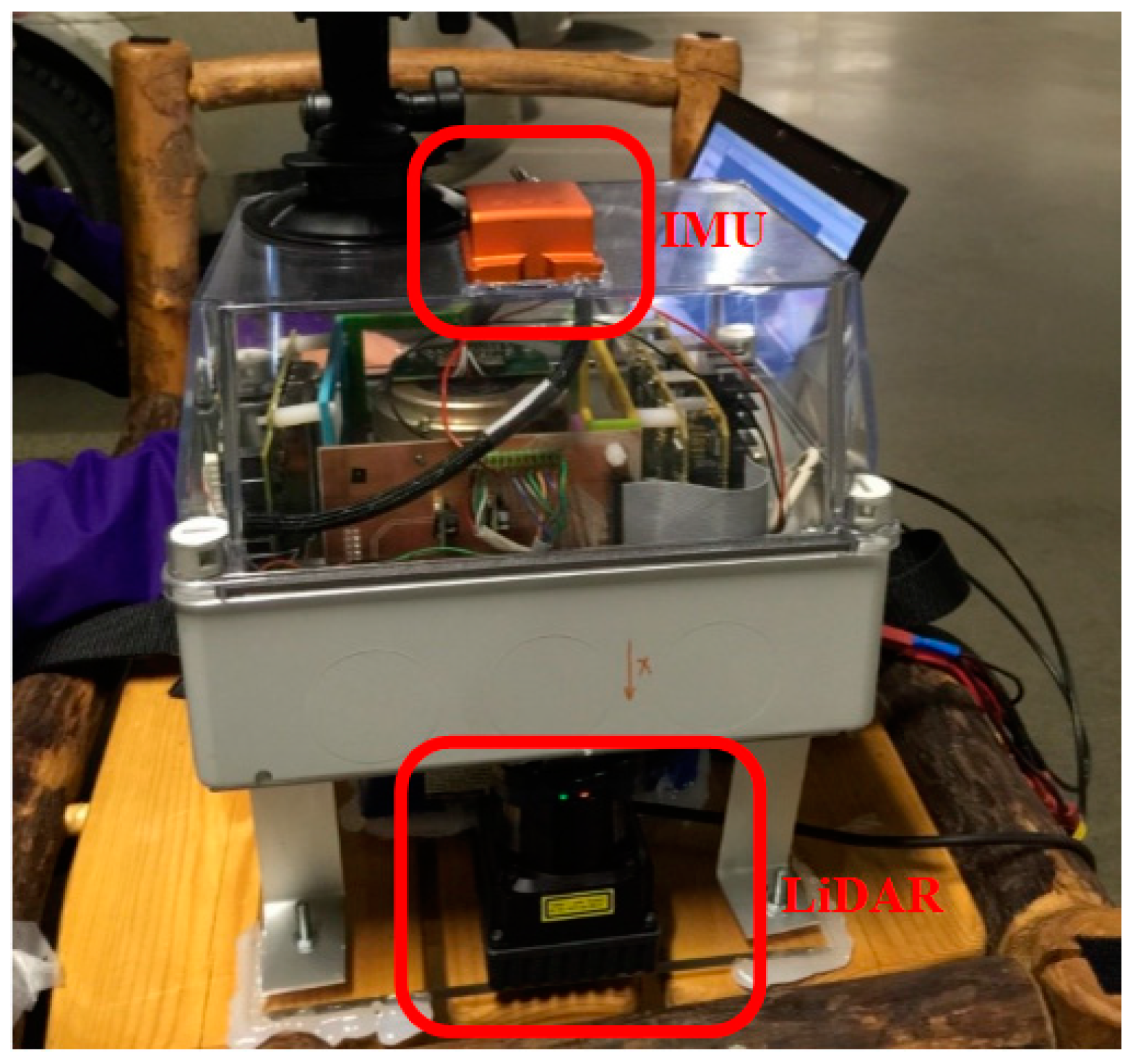
3.1. System overview
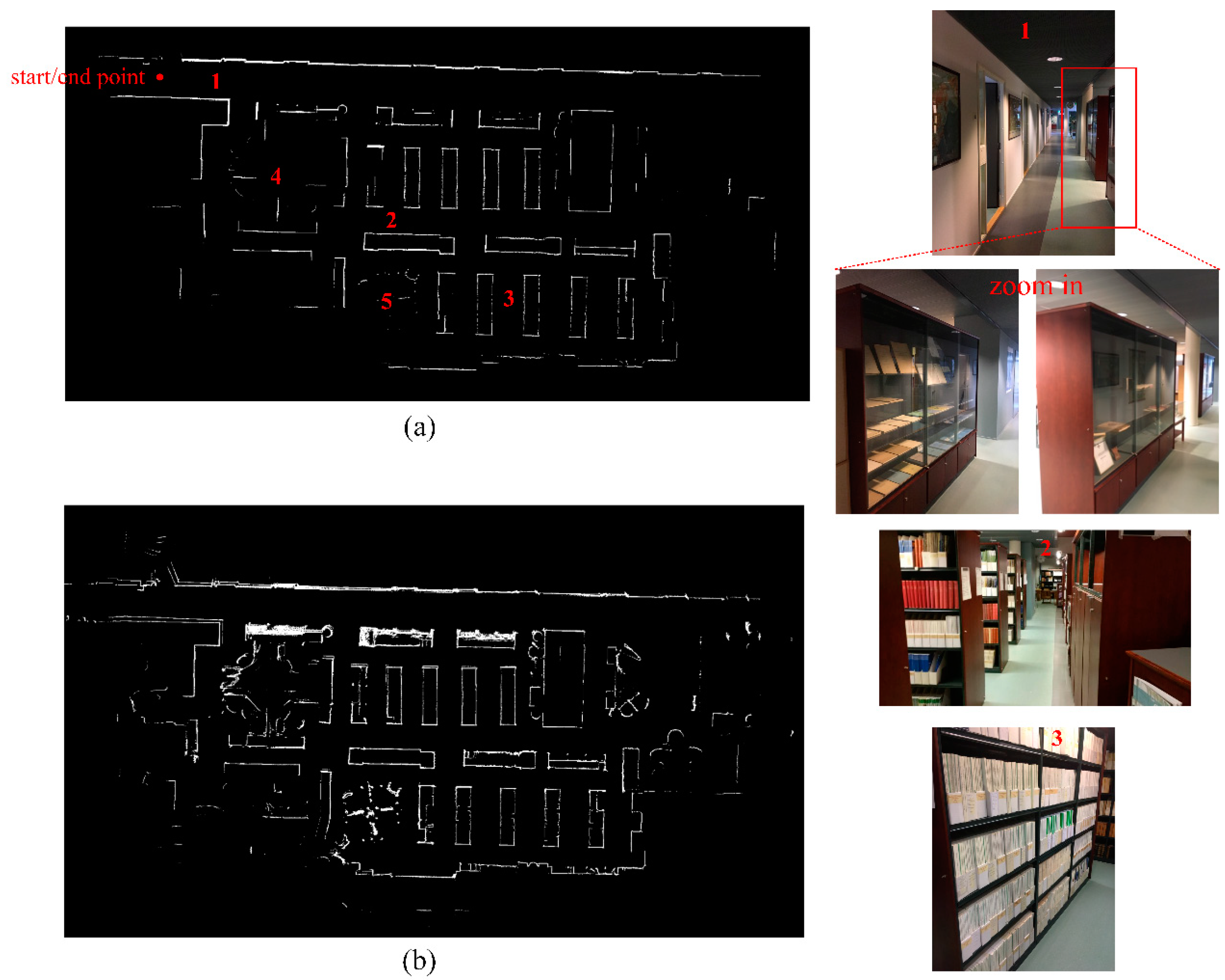
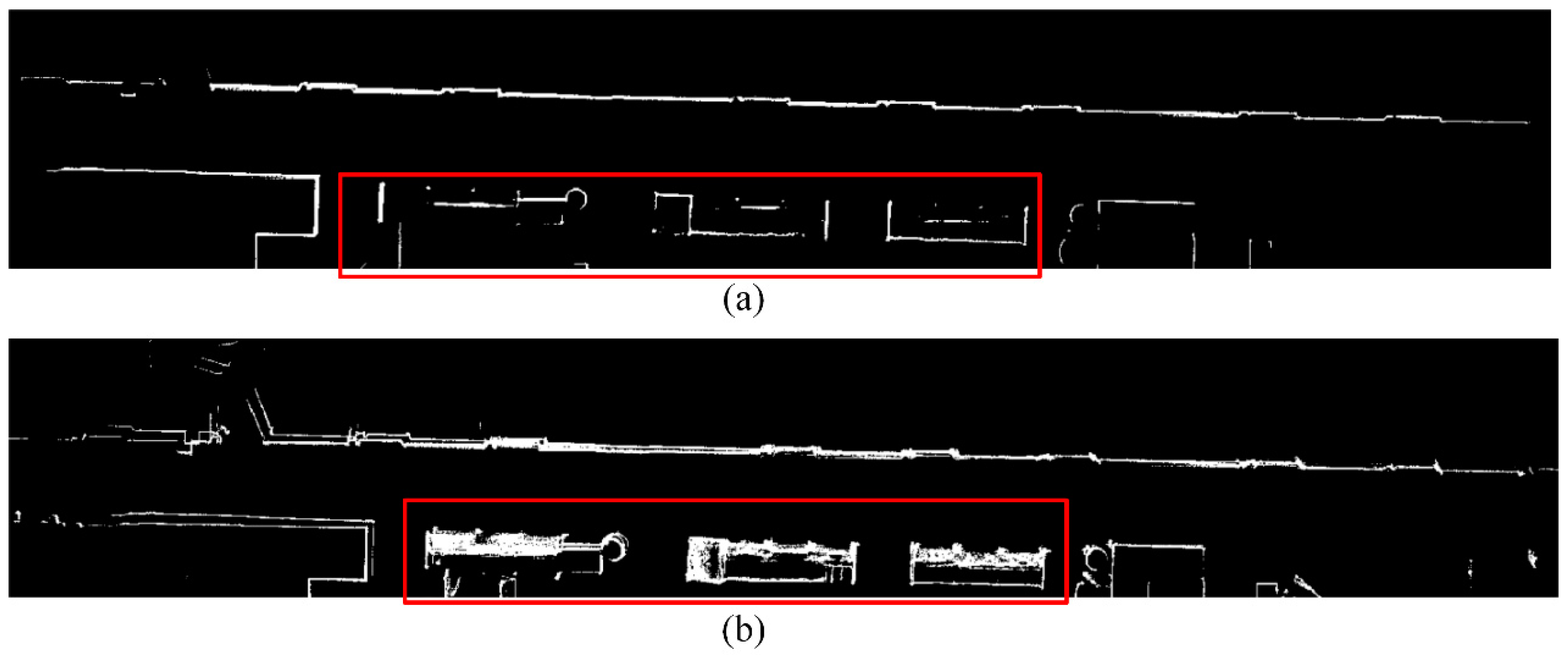
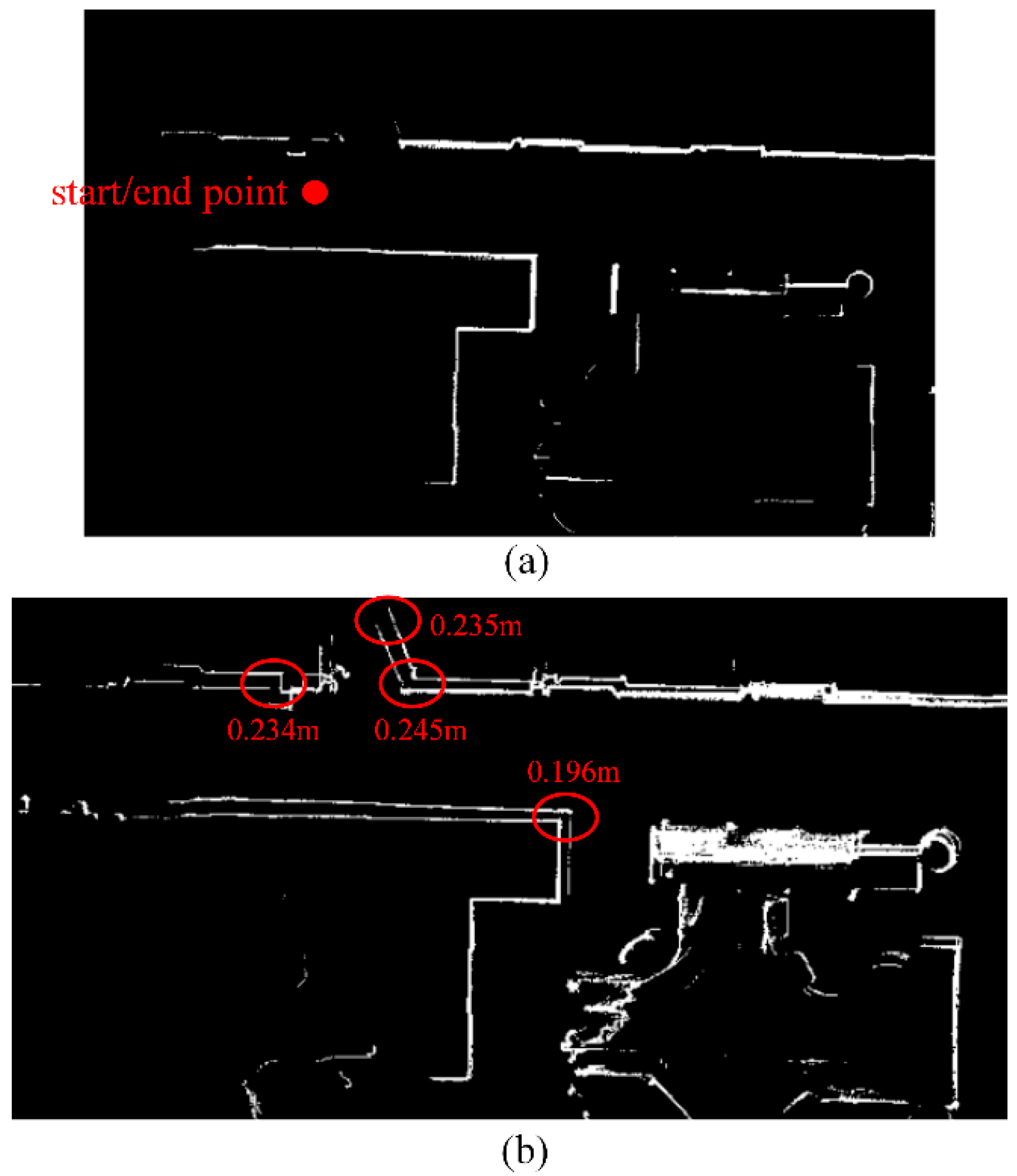
3.2. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Opromolla, R.; Fasano, G.; Grassi, M.; Savvaris, A.; Moccia, A. PCA-Based Line Detection from Range Data for Map** and Localization-Aiding of UAVs. Int. J. Aerosp. Eng. 2017, 2017, 1–14. [Google Scholar] [CrossRef]
- Yoshisada, H.; Yamada, Y.; Hiromori, A.; Yamaguchi, H.; Higashino, T. Indoor map generation from multiple LiDAR point clouds. In Proceedings of the IEEE International Conference on Smart Computing (SMARTCOMP), Vienna, Austria, 2–6 July 2018; pp. 73–80. [Google Scholar]
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and map** (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Bourmaud, G.; Mégret, R. Robust large scale monocular visual SLAM. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1638–1647. [Google Scholar]
- Choi, S.; Zhou, Q.-Y.; Koltun, V. Robust reconstruction of indoor scenes. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 5556–5565. [Google Scholar]
- Endres, F.; Hess, J.; Sturm, J.; Cremers, D.; Burgard, W. 3-D map** with an RGB-D camera. IEEE Trans. Robot. 2014, 30, 177–187. [Google Scholar] [CrossRef]
- Meng, X.; Gao, W.; Hua, Z. Dense RGB-D SLAM with multiple cameras. Sensors 2018, 18, 2118. [Google Scholar] [CrossRef]
- Valiente, D.; Payá, L.; Jiménez, L.M.; Sebastián, J.M.; Reinoso, O. Visual Information Fusion through Bayesian Inference for Adaptive Probability-Oriented Feature Matching. Sensors 2018, 18, 2041. [Google Scholar] [CrossRef] [PubMed]
- An, S.-Y.; Kang, J.-G.; Lee, L.-K.; Oh, S.-Y. Line Segment-Based Indoor Map** with Salient Line Feature Extraction. Adv. Robot. 2012, 26, 437–460. [Google Scholar] [CrossRef]
- Aghamohammadi, A.; Tamjidi, A.H.; Taghirad, H.D. SLAM using single laser range finder. In Proceedings of the 17th IFAC World Congress, Seoul, Korea, 6–11 July 2008; p. 23. [Google Scholar]
- Tang, J.; Chen, Y.; Jaakkola, A.; Liu, J.; Hyyppä, J.; Hyyppä, H. NAVIS-An UGV indoor positioning system using laser scan matching for large-area real-time applications. Sensors 2014, 14, 11805–11824. [Google Scholar] [CrossRef] [PubMed]
- Burguera, A.; González, Y.; Oliver, G.; Gonzalez-Cid, Y.; Oliver-Codina, G. On the use of likelihood fields to perform sonar scan matching localization. Auton. Robot. 2009, 26, 203–222. [Google Scholar] [CrossRef]
- Olson, E.B. Real-time correlative scan matching. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 4387–4393. [Google Scholar]
- Steux, B.; El Hamzaoui, O. tinySLAM: A SLAM algorithm in less than 200 lines C-language program. In Proceedings of the Vision (ICARCV 2010), Singapore, 7–10 December 2010; pp. 1975–1979. [Google Scholar]
- Wen, J.; Qian, C.; Tang, J.; Liu, H.; Ye, W.; Fan, X. 2D LiDAR SLAM Back-End Optimization with Control Network Constraint for Mobile Map**. Sensors 2018, 18, 3668. [Google Scholar] [CrossRef] [PubMed]
- Im, J.H.; Im, S.H.; Jee, G.I. Extended line map-based precise vehicle localization using 3D LiDAR. Sensors 2018, 18, 3179. [Google Scholar] [CrossRef]
- Aghamohammadi, A.A.; Taghirad, H.D.; Tamjidi, A.H.; Mihankhah, E. Feature-Based laser scan matching for accurate and high speed mobile robot localization. In Proceedings of the European Conference on Mobile Robots (ECMR), Freiburg, Germany, 19–21 September 2007. [Google Scholar]
- Choi, Y.H.; Lee, T.K.; Oh, S.Y. A line feature based SLAM with low grade range sensors using geometric constraints and active exploration for mobile robot. Auton. Robot. 2008, 24, 13–27. [Google Scholar] [CrossRef]
- Kuo, W.J.; Tseng, S.H.; Yu, J.Y.; Fu, L.C. A hybrid approach to RBPF based SLAM with grid map** enhanced by line matching. In Proceedings of the IEEE Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 1523–1528. [Google Scholar]
- Brunskill, E.; Roy, N. SLAM using incremental probabilistic PCA and dimensionality reduction. In Proceedings of the IEEE Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 342–347. [Google Scholar]
- Gallant, M.J.; Marshall, J.A. The LiDAR compass: Extremely lightweight heading estimation with axis maps. Robot. Auton. Syst. 2016, 82, 35–45. [Google Scholar] [CrossRef]
- Kuo, B.-W.; Chang, H.-H.; Chen, Y.-C.; Huang, S.-Y. A Light-and-Fast SLAM Algorithm for Robots in Indoor Environments Using Line Segment Map. J. Robot. 2011, 2011, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, V.; Harati, A.; Martinelli, A.; Siegwart, R.; Tomatis, N. Orthogonal SLAM: A step toward lightweight indoor autonomous navigation. In Proceedings of the IEEE Conference on Intelligent Robots and Systems, Bei**g, China, 9–15 October 2006; pp. 5007–5012. [Google Scholar]
- Wang, C.; Hou, S.; Wen, C.; Gong, Z.; Li, Q.; Sun, X.; Li, J. Semantic line framework-based indoor building modeling using backpacked laser scanning point cloud. ISPRS J. Photogramm. Remote. Sens. 2018, 143, 150–166. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Proceedings of the Robotics-DL Tentative, International Society for Optics and Photonics, Boston, MA, USA, 30 April 1992; pp. 586–606. [Google Scholar]
- Diosi, A.; Kleeman, L. Laser scan matching in polar coordinates with application to SLAM. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3317–3322. [Google Scholar]
- Bosse, M.C. ATLAS: A Framework for Large Scale Automated Map** and Localization. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2004. [Google Scholar]
- Censi, A. An ICP variant using a point-to-line metric. In Proceedings of the IEEE Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 18–23 May 2008; pp. 19–25. [Google Scholar]
- Bachrach, A.; Prentice, S.; He, R.; Roy, N. RANGE-Robust autonomous navigation in GPS-denied environments. J. Robot. 2011, 28, 644–666. [Google Scholar] [CrossRef] [Green Version]
- Pfister, S.T. Algorithms for Mobile Robot Localization and Map**, Incorporating Detailed Noise Modeling and Multi-Scale Feature Extraction. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2006. [Google Scholar]
- Li, L.; Yao, J.; ** systems. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 3812, 231–236. [Google Scholar] [CrossRef]
- Shin, E.H. Estimation Techniques for Low-Cost Inertial Navigation. Available online: http://www.geomatics.ucalgary.ca/links/GradTheses.html (accessed on 10 July 2015).
- Nguyen, V.; Martinelli, A.; Tomatis, N.; Siegwart, R. A comparison of line extraction algorithms using 2D laser rangefinder for indoor mobile robotics. In Proceedings of the IEEE Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 1929–1934. [Google Scholar]
- Pavlidis, T.; Horowitz, S.L. Segmentation of plane curves. IEEE Trans. Comput. 1974, 100, 860–870. [Google Scholar] [CrossRef]
- Siadat, A.; Kaske, A.; Klausmann, S.; Dufaut, M.; Husson, R. An optimized segmentation method for a 2D laser-scanner applied to mobile robot navigation. IFAC Proc. Vol. 1997, 30, 149–154. [Google Scholar] [CrossRef]
- Debled-Rennesson, I.; Feschet, F.; Rouyer-Degli, J. Optimal blurred segments decomposition in linear time. In Proceedings of the International Conference on Discrete Geometry for Computer Imagery, Poitiers, France, 11–13 April 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 371–382. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
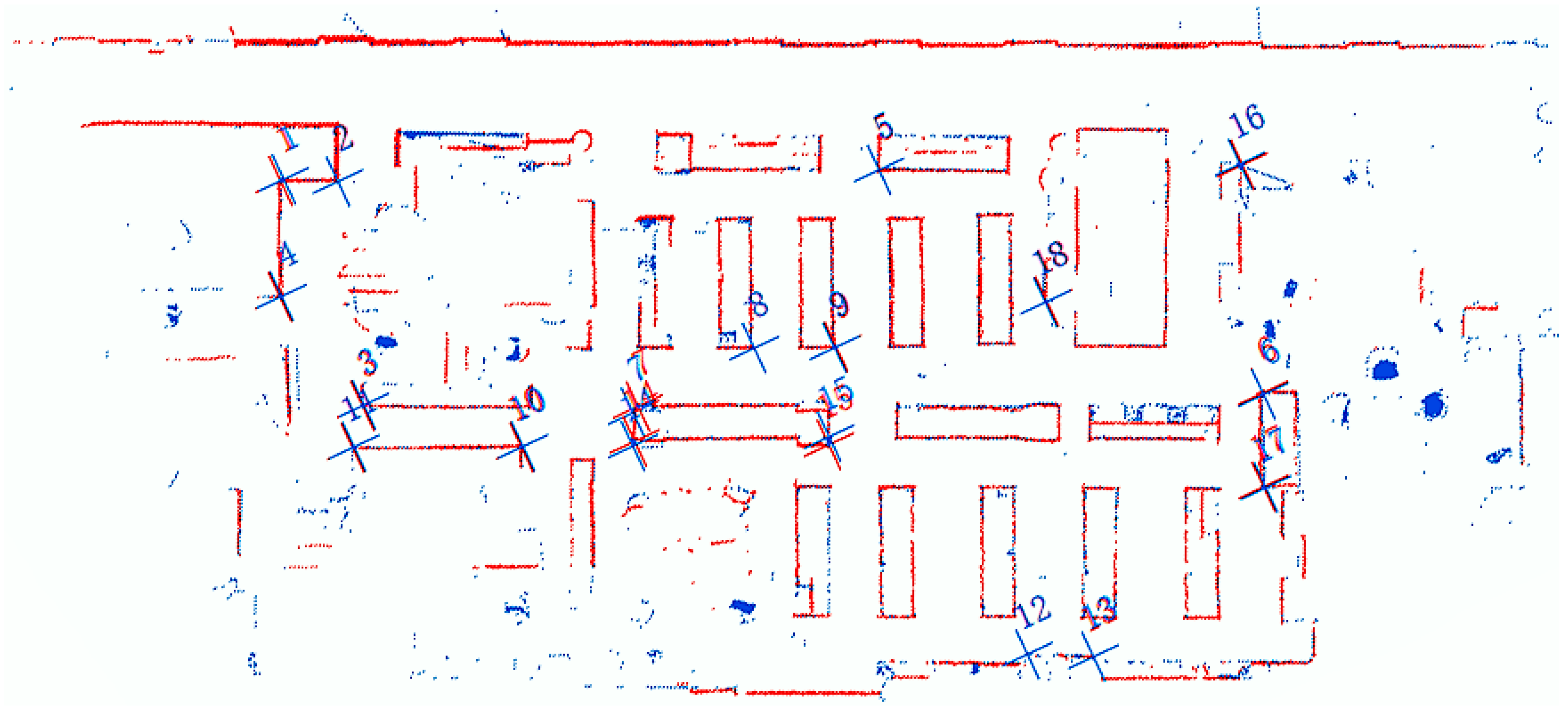
| No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| residual_x | 5.8 | −1.8 | 2.5 | 2 | 1.4 | 1.9 | −12.5 | −0.6 | −1.6 | 2.9 | 1 | 0.3 | 1.3 | −8.5 | 6.2 | −1 | 3.5 | −2.7 |
| residual_y | −1.5 | 0.1 | 1.5 | 0.4 | 2.2 | −4.7 | −6.7 | 0.3 | 1.7 | −1.1 | 0.5 | 1.5 | 2.6 | −7.4 | 14.5 | 1.8 | −6.2 | 0.7 |
| residual | 6 | 1.8 | 2.9 | 2.1 | 2.6 | 5 | 14.2 | 0.7 | 2.3 | 3.1 | 1.1 | 1.6 | 2.9 | 11.3 | 15.7 | 2.1 | 7.2 | 2.8 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, C.; Zhang, H.; Tang, J.; Li, B.; Liu, H. An Orthogonal Weighted Occupancy Likelihood Map with IMU-Aided Laser Scan Matching for 2D Indoor Map**. Sensors 2019, 19, 1742. https://doi.org/10.3390/s19071742
Qian C, Zhang H, Tang J, Li B, Liu H. An Orthogonal Weighted Occupancy Likelihood Map with IMU-Aided Laser Scan Matching for 2D Indoor Map**. Sensors. 2019; 19(7):1742. https://doi.org/10.3390/s19071742
Chicago/Turabian StyleQian, Chuang, Hongjuan Zhang, Jian Tang, Bijun Li, and Hui Liu. 2019. "An Orthogonal Weighted Occupancy Likelihood Map with IMU-Aided Laser Scan Matching for 2D Indoor Map**" Sensors 19, no. 7: 1742. https://doi.org/10.3390/s19071742