A Neuron-Based Kalman Filter with Nonlinear Autoregressive Model



Abstract
:1. Introduction
2. Related Work
2.1. Kalman Filter and Its Improvement
2.2. Filter with Neural Network
2.2.1. Distributed Integration of Kalman filter and ANN
2.2.2. Crossed Integration of Kalman Filter and ANN
3. Neuron-Based Kalman Filter
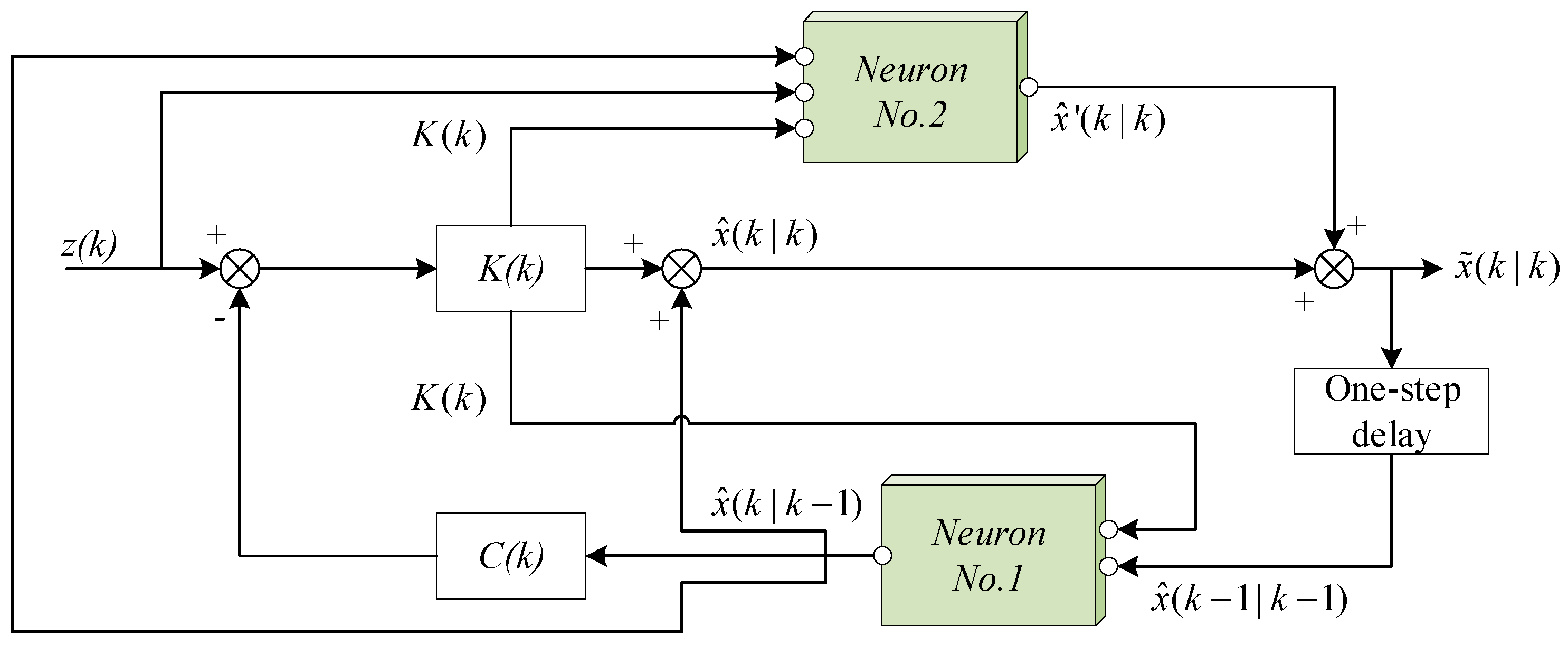
3.1. Framework of Neuron-Based Kalman Filter
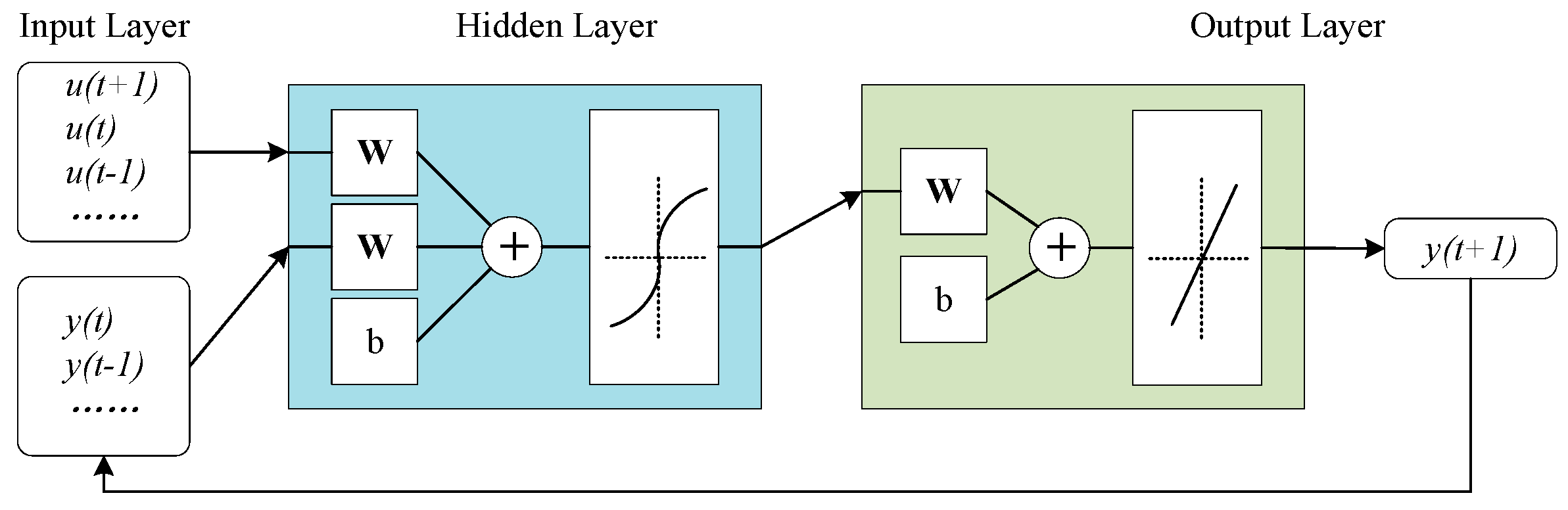
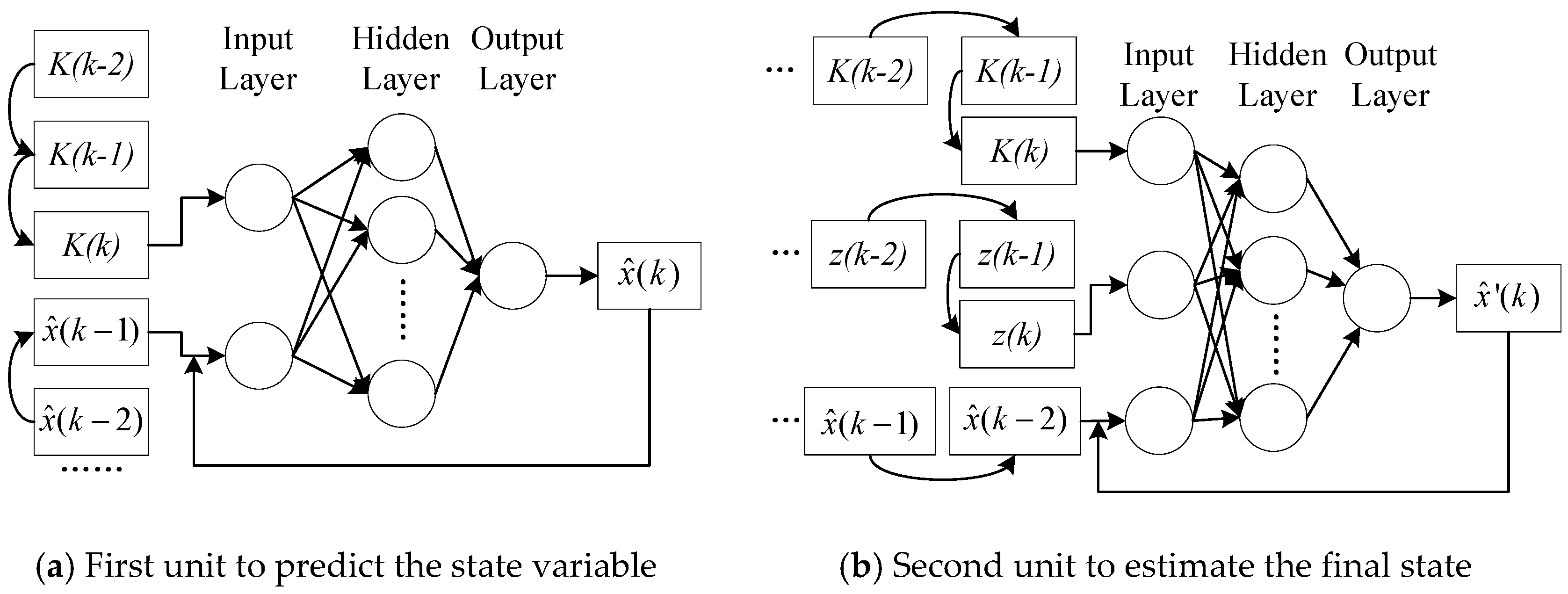
3.2. Neuro Units Based on Nonlinear Autoregressive Model
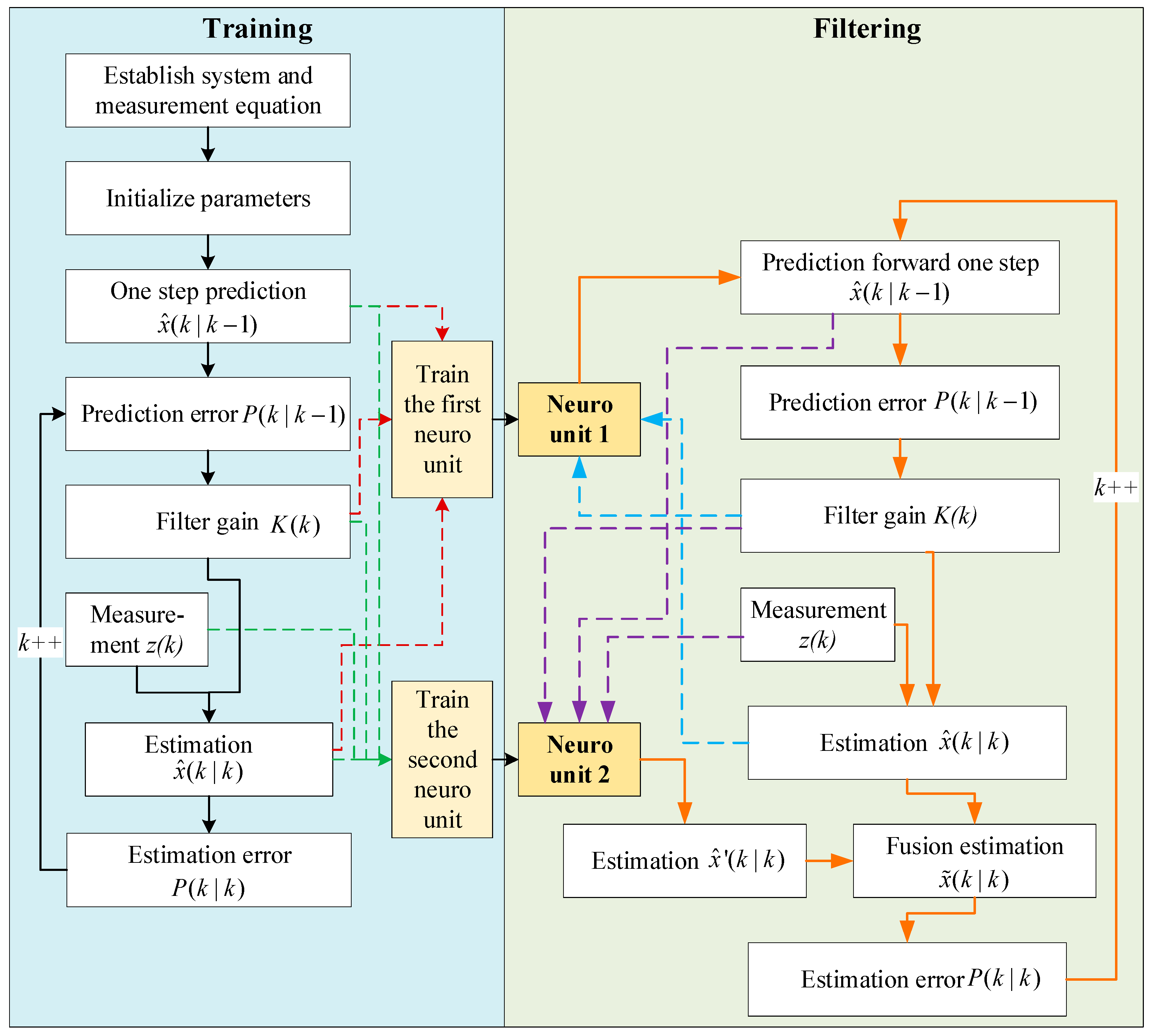
3.3. Adaptive Filtering Algorithm
- (A)
- Training process
- (1)
- The system and measurement equations are established according to the object. The parameters in the Kalman filter can be initialized with empirical values.
- (2)
- The primary calculation of the Kalman filter is conducted iteratively following Equations (1)–(7). The measurement vectors are imported into the filter along with time. The intermediate and final values are recorded, including the one-step prediction value, Kalman gain, measurement, estimation result, etc. The recorded values are all labeled with a time stamp. Meanwhile, the iterative steps should be no less than about 150 for the following neuro unit training. The number of sample steps may be adjusted according to the complexity of signals.
- (3)
- With the filtering values in step 2, they are marked with the step number to form the time series sets. Then the prediction value and filter gain are imported into the first neuro unit. The prediction value, filter gain, and measurement are imported into the second neuro unit. The estimation result is set as the reference output of the two units.
- (4)
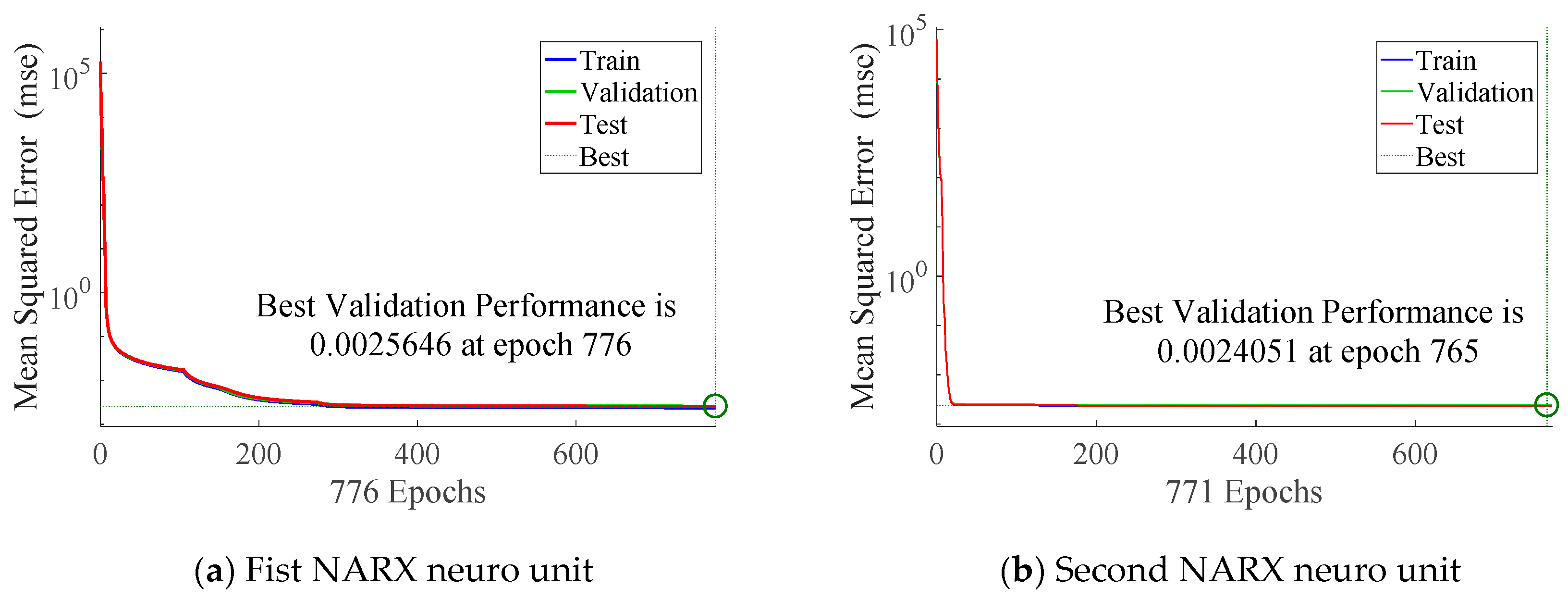
- The neuro units are trained with the learning method L–M in Section 3.2. The trained neuro units are obtained when the preset iteration conditions are met, including the numbers of iteration or the convergence error.
- (B)
- Filtering process with trained neuro units
- (5)
- Based on the model equations and the initialized parameters in Kalman filter, the initial variable and filter gain are imported into the first neuro unit, and the prediction value is outputted and set as the basis of prediction error.
- (6)
- The filter gain is updated and used to calculate the estimation value with the measurement. Meanwhile, the prediction value, filter gain, and measurement are imported into the second neuro unit to obtain another estimation value.
- (7)
- The two estimation values are fused following Equation (10).
- (8)
- The step moves forward to conduct steps (5)–(7) iteratively. In the iteration, the measurement vectors are calculated along with time.
4. Experiment and Result
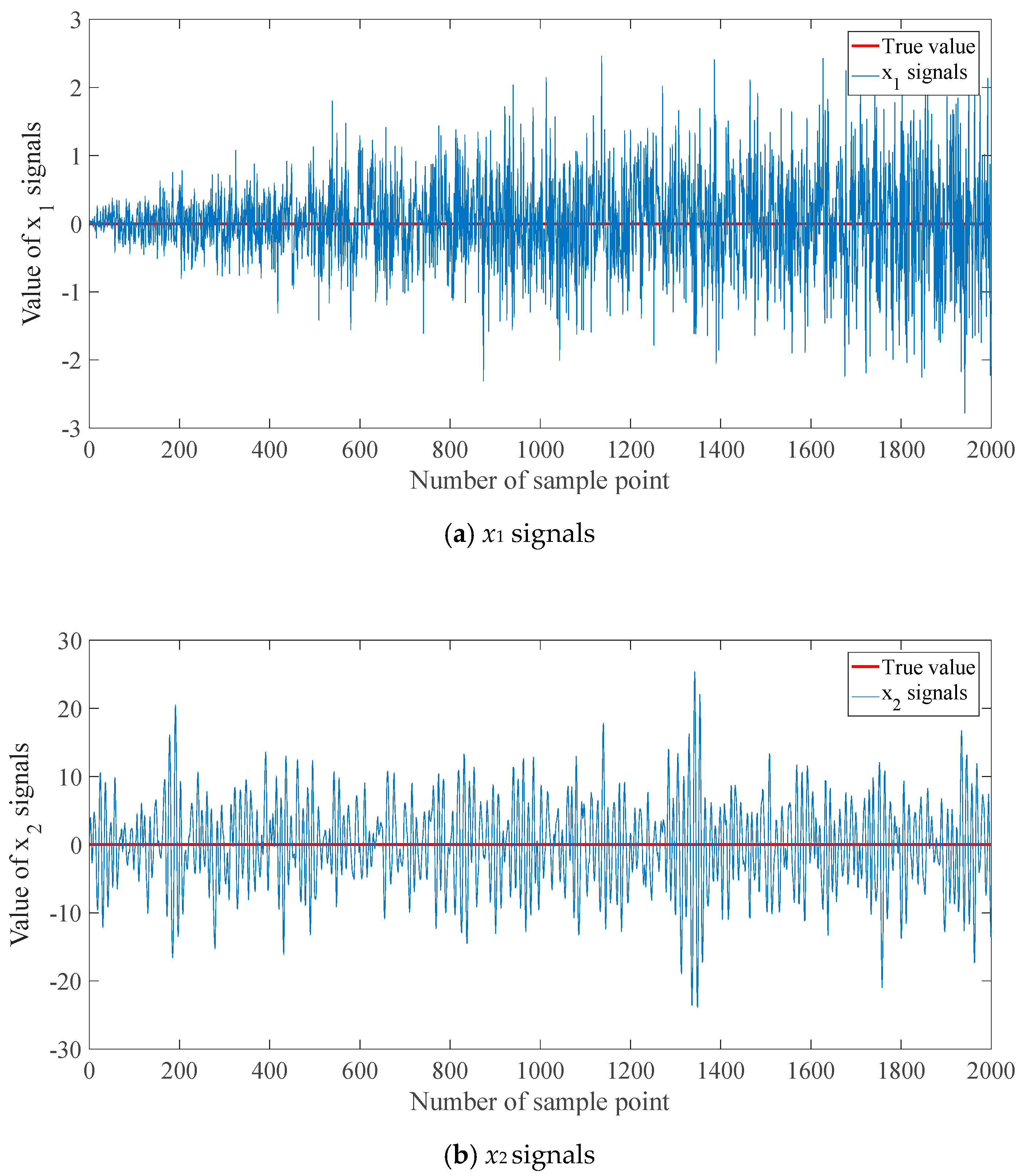
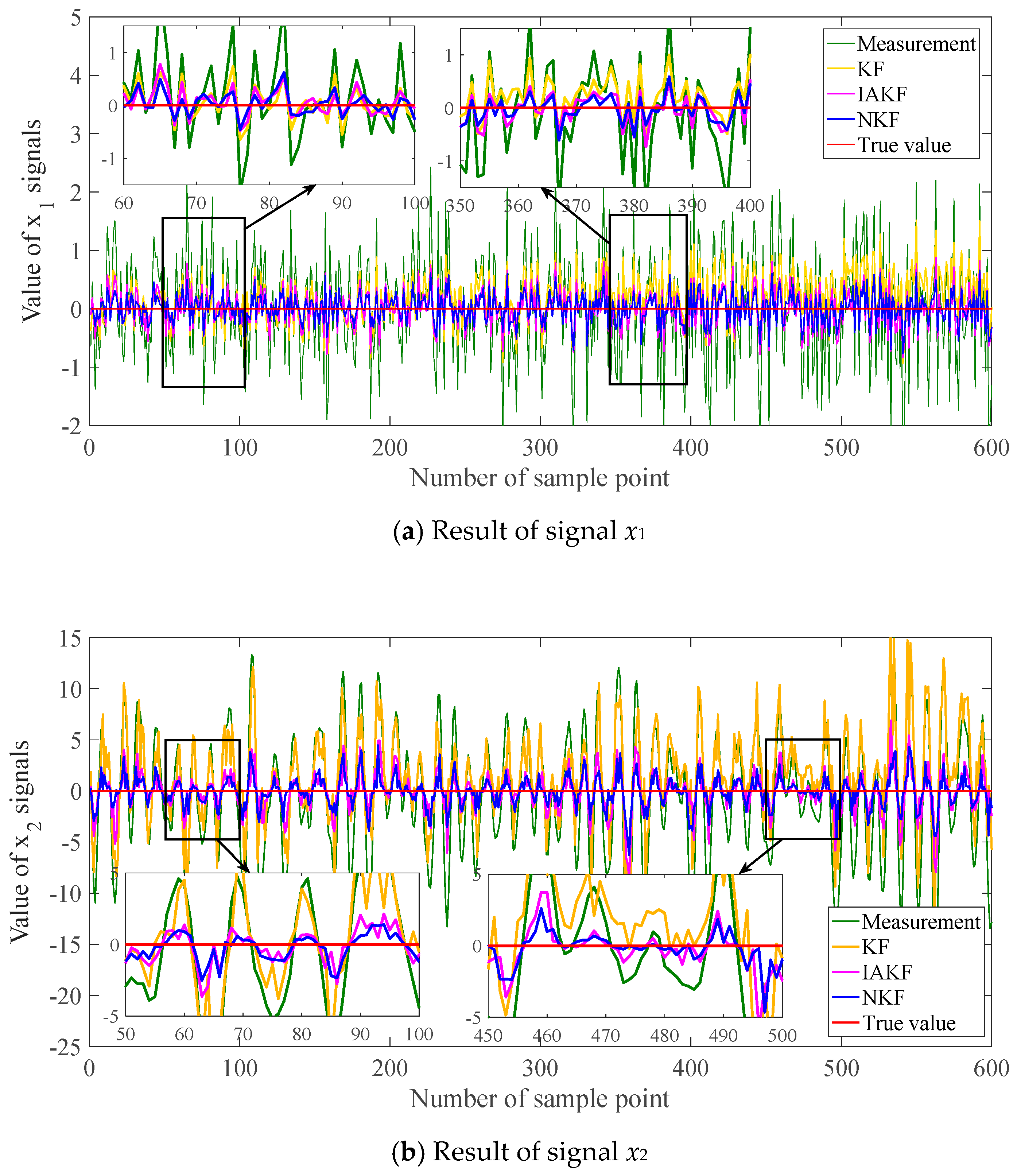
4.1. Simulation and Result
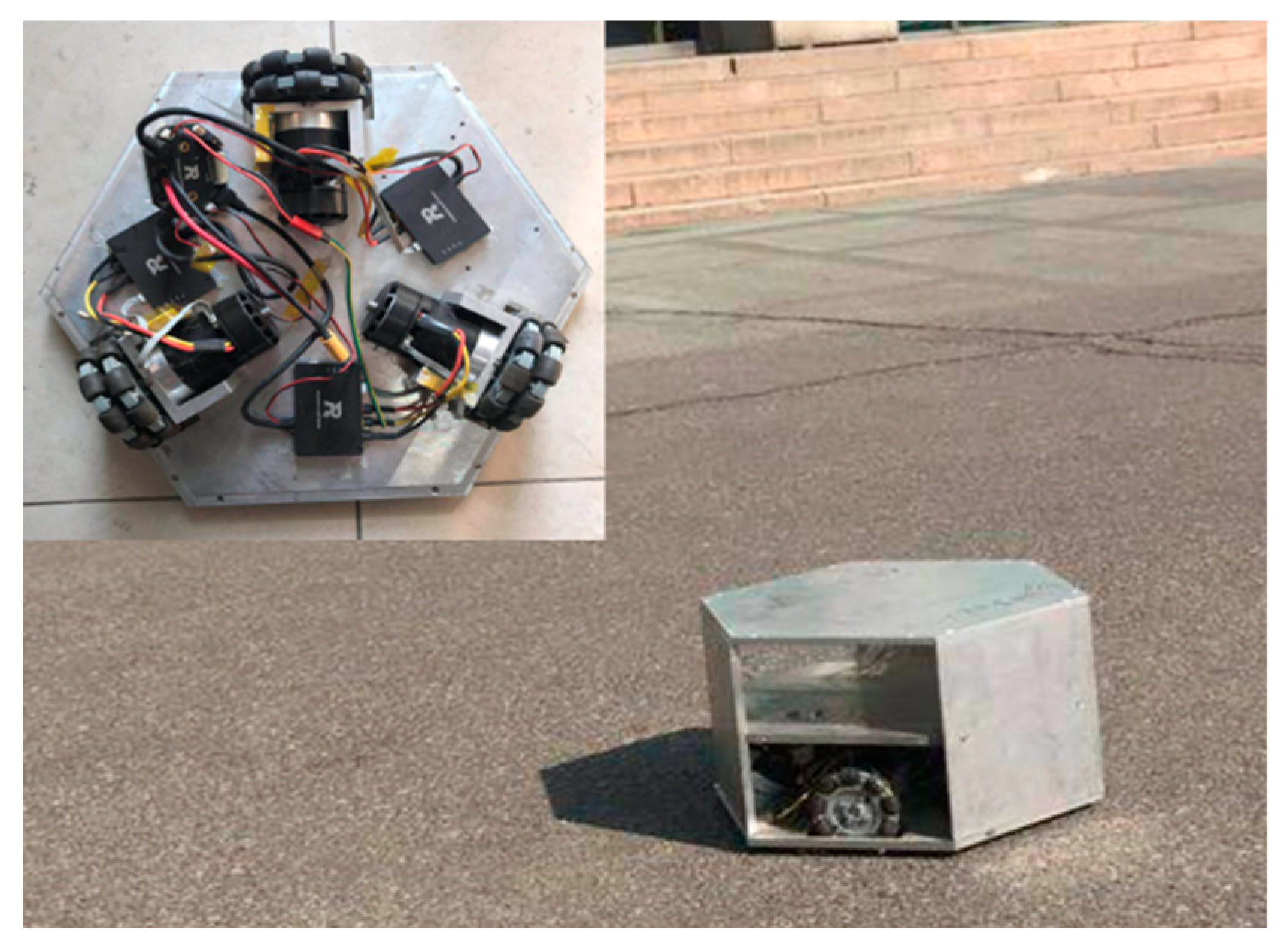
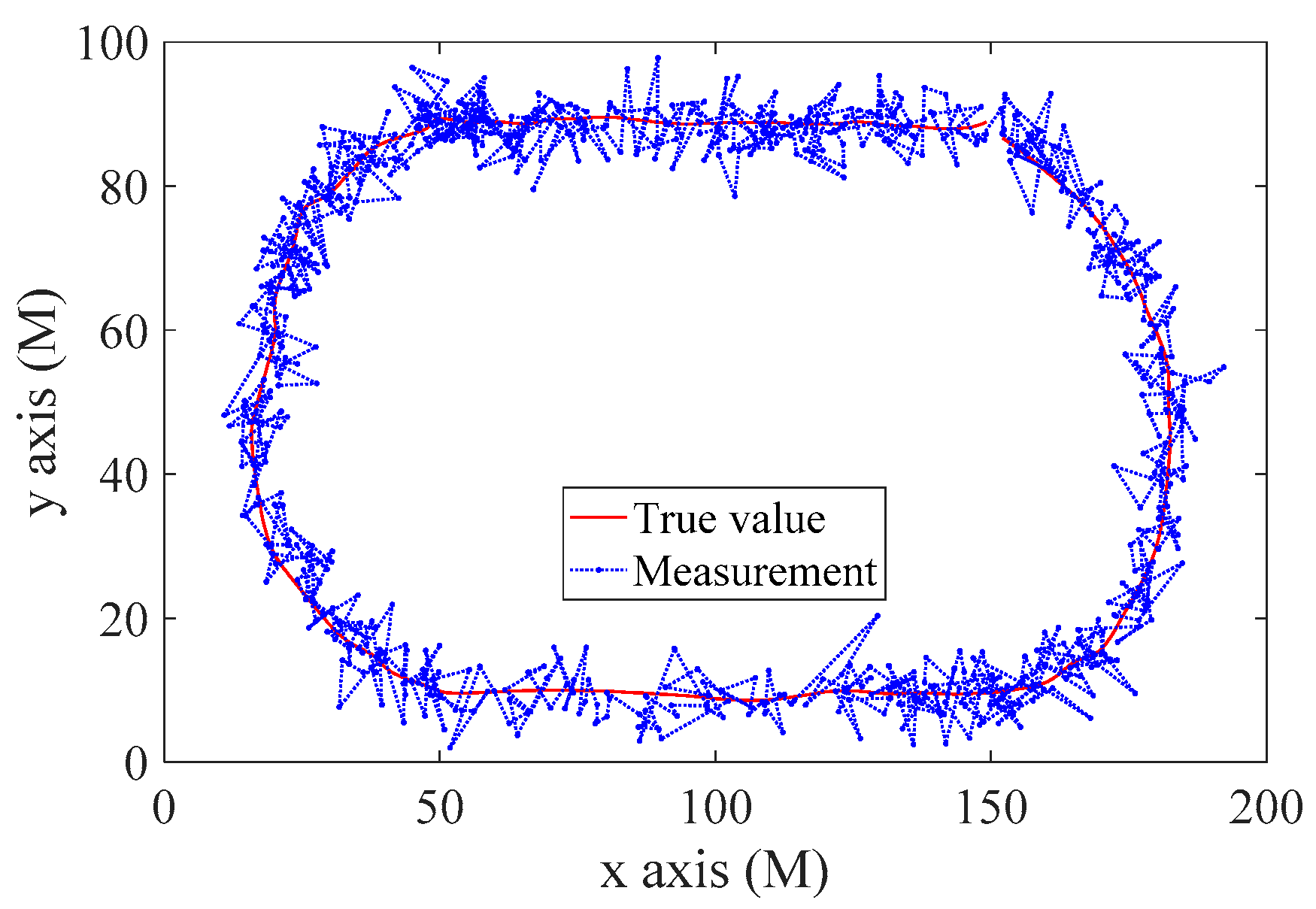
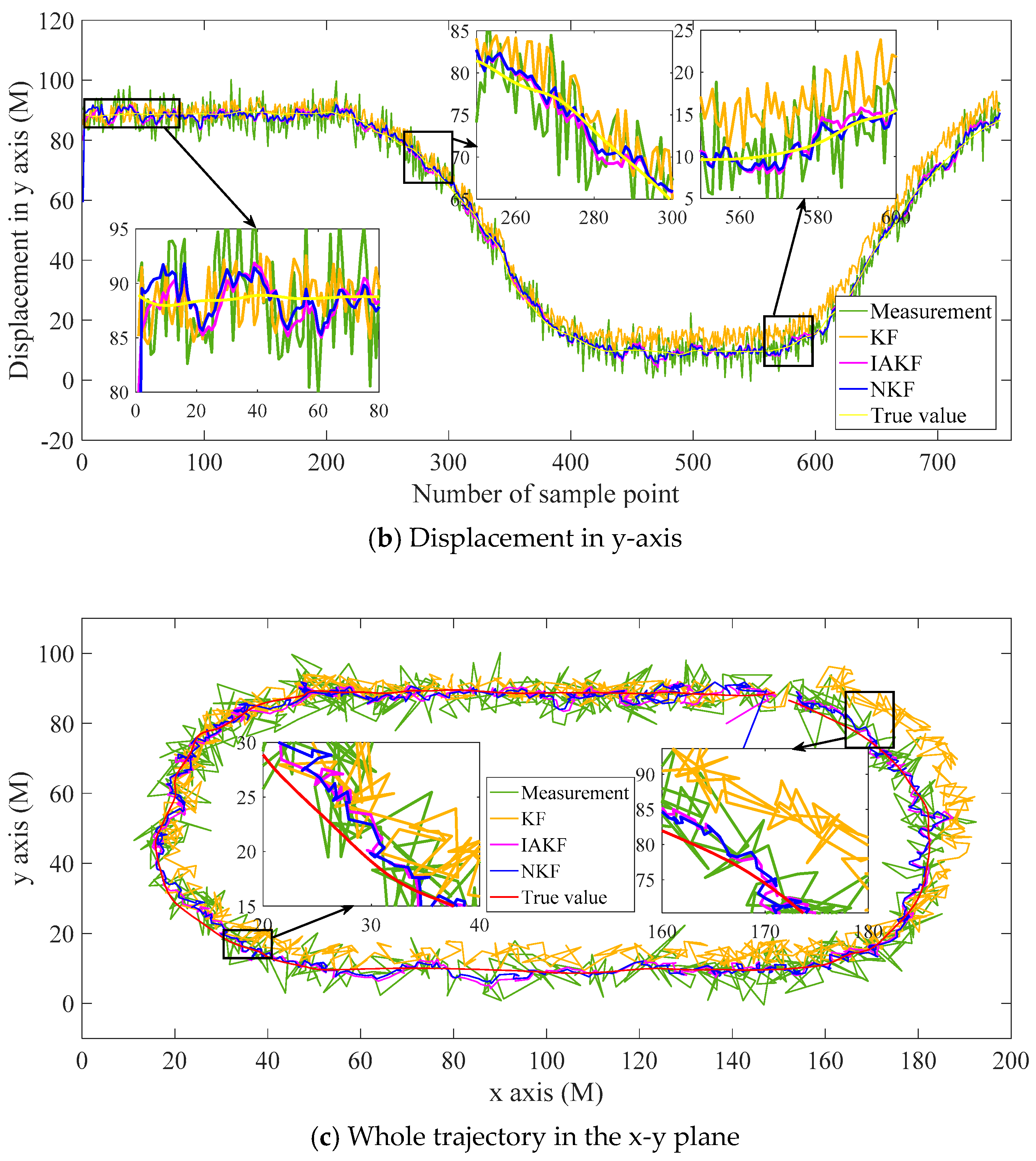
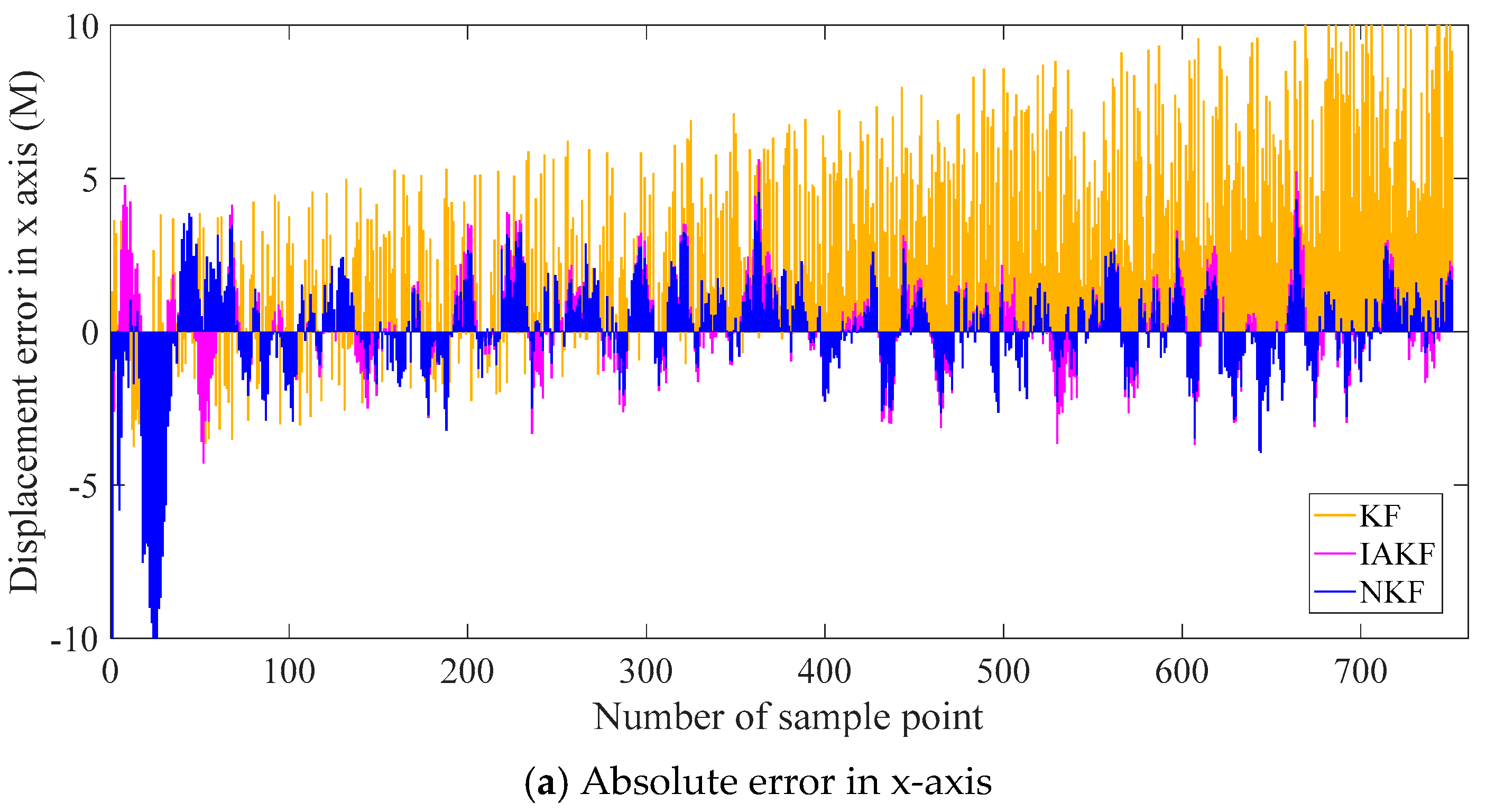
4.2. Practical Experiment and Result
4.2.1. Result of the Whole Trajectory
4.2.2. Result of Segment in the Trajectory
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mohd-Yasin, F.; Nagel, D.J.; Korman, C.E. Noise in MEMS. Meas. Sci. Technol. 2009, 21, 012001. [Google Scholar] [CrossRef]
- Shiau, J.K.; Huang, C.X.; Chang, M.Y. Noise characteristics of MEMS gyro’s null drift and temperature compensation. J. Appl. Sci. Eng. 2012, 15, 239–246. [Google Scholar]
- Jiang, Z.; Ni, M.; Lu, Q.; Liu, Z.; Zhao, Y. Wavelet filter: Pure-intensity spatial filters that implement wavelet transforms. Appl. Opt. 1996, 35, 5758–5760. [Google Scholar] [CrossRef] [PubMed]
- Yu, P.; Li, Y.; Lin, H.; Wu, N. Seismic random noise removal by delay-compensation time-frequency peak filtering. J. Geophys. Eng. 2017, 14, 691–697. [Google Scholar] [CrossRef] [Green Version]
- Boudraa, A.O.; Cexus, J.C.; Benramdane, S.; Beghdadi, A. Noise filtering using empirical mode decomposition. In Proceedings of the 9th International Symposium on Signal Processing and Its Applications, Sharjah, UAE, 12–15 February 2007; pp. 1–4. [Google Scholar]
- Harvey, A.C. Forecasting, Structural Time Series Models and the Kalman Filter; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Wang, Y.J.; Ding, F.; Wu, M.H. Recursive parameter estimation algorithm for multivariate output-error systems. J. Frankl. Inst. 2018, 355, 5163–5181. [Google Scholar] [CrossRef]
- Ding, F.; Zhang, X.; Xu, L. The innovation algorithms for multivariable state-space models. Int. J. Adapt. Control Signal Process. 2019, 33, 1601–1608. [Google Scholar] [CrossRef]
- Pan, J.; Jiang, X.; Wan, X.K.; Ding, W. A filtering based multi-innovation extended stochastic gradient algorithm for multivariable control systems. Int. J. Control. Syst. 2017, 15, 1189–1197. [Google Scholar] [CrossRef]
- Ding, F. Two-stage least squares based iterative estimation algorithm for CARARMA system modeling. Appl. Math. Model. 2013, 37, 4798–4808. [Google Scholar] [CrossRef]
- Ding, F. Decomposition based fast least squares algorithm for output error systems. Signal Process. 2013, 93, 1235–1242. [Google Scholar] [CrossRef]
- Li, M.H.; Liu, X.M.; Ding, F. The filtering-based maximum likelihood iterative estimation algorithms for a special class of nonlinear systems with autoregressive moving average noise using the hierarchical identification principle. Int. J. Adapt. Control Signal Process. 2019, 33, 1189–1211. [Google Scholar] [CrossRef]
- Liu, L.J.; Ding, F.; Xu, L.; Pan, J.; Alsaedi, A.; Hayat, T. Maximum likelihood recursive identification for the multivariate equation-error autoregressive moving average systems using the data filtering. IEEE Access 2019, 7, 41154–41163. [Google Scholar] [CrossRef]
- Zhang, X.; Ding, F.; Xu, L.; Yang, E. State filtering-based least squares parameter estimation for bilinear systems using the hierarchical identification principle. IET Control Theory Appl. 2018, 12, 1704–1713. [Google Scholar] [CrossRef] [Green Version]
- Gu, Y.; Ding, F.; Li, J.H. States based iterative parameter estimation for a state space model with multi-state delays using decomposition. Signal Process. 2015, 106, 294–300. [Google Scholar] [CrossRef]
- Liu, Y.J.; Ding, F.; Shi, Y. An efficient hierarchical identification method for general dual-rate sampled-data systems. Automatica 2014, 50, 962–970. [Google Scholar] [CrossRef]
- Mehra, R.K. On the identification of variances and adaptive Kalman filtering. IEEE Trans. Autom. Control. 1970, 15, 175–184. [Google Scholar] [CrossRef]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Rutan, S.C. Adaptive Kalman filtering. Anal. Chem. 1991, 63, 687–689. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, FL, USA, 28 July 1997; Volume 3068, pp. 182–193. [Google Scholar]
- ** iterative parameter identification method for dynamical systems based on the sine signal measurement. Signal Process. 2016, 120, 660–667. [Google Scholar] [CrossRef]
- Ding, F.; Wang, F.F.; Xu, L.; Wu, M.H. Decomposition based least squares iterative identification algorithm for multivariate pseudo-linear ARMA systems using the data filtering. J. Frankl. Inst. 2017, 354, 1321–1339. [Google Scholar] [CrossRef]
- Ding, F.; Liu, G.; Liu, X.P. Partially coupled stochastic gradient identification methods for non-uniformly sampled systems. IEEE Trans. Autom. Control. 2010, 55, 1976–1981. [Google Scholar] [CrossRef]
- Ding, J.; Ding, F.; Liu, X.P.; Liu, G. Hierarchical least squares identification for linear SISO systems with dual-rate sampled-data. IEEE Trans. Autom. Control. 2011, 56, 2677–2683. [Google Scholar] [CrossRef]
- Xu, L.; Chen, L.; **ong, W.L. Parameter estimation and controller design for dynamic systems from the step responses based on the Newton iteration. Nonlinear Dyn. 2015, 79, 2155–2163. [Google Scholar] [CrossRef]
- Xu, L. The parameter estimation algorithms based on the dynamical response measurement data. Adv. Mech. Eng. 2017, 9, 1–12. [Google Scholar] [CrossRef]
- Wang, Y.J.; Ding, F. Novel data filtering based parameter identification for multiple-input multiple-output systems using the auxiliary model. Automatica 2016, 71, 308–313. [Google Scholar] [CrossRef]
- Ding, F.; Liu, Y.J.; Bao, B. Gradient based and least squares based iterative estimation algorithms for multi-input multi-output systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2012, 226, 43–55. [Google Scholar] [CrossRef]
- Xu, L.; Ding, F.; Gu, Y.; Alsaedi, A.; Hayat, T. A multi-innovation state and parameter estimation algorithm for a state space system with d-step state-delay. Signal Process. 2017, 140, 97–103. [Google Scholar] [CrossRef]
- Ma, H.; Pan, J.; Lv, L.; Xu, G.; Ding, F.; Alsaedi, A.; Hayat, T. Recursive algorithms for multivariable output-error-like ARMA systems. Mathematics 2019, 7, 558. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.X.; **ong, W.L.; Chen, J.; Feng, D. Hierarchical identification for multivariate Hammerstein systems by using the modified Kalman filter. IET Control Theory Appl. 2017, 11, 857–869. [Google Scholar] [CrossRef]
- Ding, F.; Liu, X.G.; Chu, J. Gradient-based and least-squares-based iterative algorithms for Hammerstein systems using the hierarchical identification principle. IET Control Theory Appl. 2013, 7, 176–184. [Google Scholar] [CrossRef]
- Wan, L.J.; Ding, F. Decomposition- and gradient-based iterative identification algorithms for multivariable systems using the multi-innovation theory. Circuits Syst. Signal Process. 2019, 38, 2971–2991. [Google Scholar] [CrossRef]
- **, X.; Yang, N.; Wang, X.; Bai, Y.; Su, T.; Kong, J. Integrated predictor based on decomposition mechanism for PM2.5 long-term prediction. Appl. Sci. 2019, 9, 4533. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| KF | IAKF | NKF | ||
|---|---|---|---|---|
| Signal x1 | MAE | 0.3692 | 0.2550 | 0.2004 |
| RMSE | 0.4577 | 0.3170 | 0.2507 | |
| Signal x2 | MAE | 3.3379 | 1.2678 | 1.0294 |
| RMSE | 4.4763 | 1.8295 | 1.4429 |
| KF | IAKF | NKF | ||
|---|---|---|---|---|
| x axis | MAE | 3.8730 | 1.3117 | 1.3048 |
| RMSE | 4.6732 | 1.9079 | 1.6594 | |
| y axis | MAE | 3.7327 | 1.3184 | 1.1651 |
| RMSE | 4.5560 | 1.7578 | 1.6430 |
| KF | IAKF | NKF | ||
|---|---|---|---|---|
| x axis | MAE | 4.0157 | 2.0905 | 1.7159 |
| RMSE | 4.7610 | 2.5017 | 2.0879 | |
| y axis | MAE | 3.8769 | 1.7897 | 1.5230 |
| RMSE | 4.5707 | 2.1330 | 1.8024 |
| Simulation | Practical Experiment (Whole Trajectory) | |||
|---|---|---|---|---|
| Signal x1 | Signal x2 | x Axis | y Axis | |
| KF | 1.23 | 1.45 | 2.15 | 2.09 |
| IAKF | 1.37 | 1.73 | 2.32 | 2.43 |
| NKF | 1.27 | 1.79 | 2.41 | 2.24 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Y.-t.; Wang, X.-y.; **, X.-b.; Zhao, Z.-y.; Zhang, B.-h. A Neuron-Based Kalman Filter with Nonlinear Autoregressive Model. Sensors 2020, 20, 299. https://doi.org/10.3390/s20010299
Bai Y-t, Wang X-y, ** X-b, Zhao Z-y, Zhang B-h. A Neuron-Based Kalman Filter with Nonlinear Autoregressive Model. Sensors. 2020; 20(1):299. https://doi.org/10.3390/s20010299
Chicago/Turabian StyleBai, Yu-ting, **ao-yi Wang, Xue-bo **, Zhi-yao Zhao, and Bai-hai Zhang. 2020. "A Neuron-Based Kalman Filter with Nonlinear Autoregressive Model" Sensors 20, no. 1: 299. https://doi.org/10.3390/s20010299