1. Introduction
The interaction between light and biological cells, tissues, organs, and body signals has enabled significant contributions of photonics to the medical field [
1]. In particular, the possibility of sensing such interactions provides a way to enhance medical diagnosis, monitoring, treatments, and overall healthcare. In this context, biomedical photonic sensors play a crucial role.
Biomedical photonic sensors must be safe, highly stable, biocompatible, sterilization-compatible, free of recalibrations (especially in the short term), and meet other requirements when functioning in the clinical environment [
1]. Furthermore, small size, robustness, and flexibility are highly desirable for the integration of devices into medical instruments (e.g., endoscopes, catheters). In particular, biomedical photonic sensors based on optical-fibre sensing have strong potential to meet such requirements. Optical fibres have additional key advantages for the medical field, such as miniaturization, immunity to electromagnetic radiation (e.g., for its use in magnetic resonance interventions), continuous monitoring, and, in some cases, the possibility of achieving higher sensitivities and accuracy than conventional sensing methods. Possibly, the most important differentiator of biomedical optical-fibre sensors is that they are flexible and small, thus suitable for integration into medical instruments such as catheters, needles, and endoscopes. There are many areas in which biomedical optical-fibre sensors have been investigated. For instance, physiological monitoring, minimally invasive surgery, biomechanics (or shape sensing), medical sensing related to cancers, infections, diseases, disorders, or physical and biochemical parameters determining health conditions [
2,
3,
4,
5,
6].
In general, optical-fibre sensors are highly diverse. Since the optical properties of most materials are naturally responsive to their surroundings, there is a large number of sensing opportunities for optical-fibre sensors to measure several physical, chemical, and biological parameters [
7]. Even though the modulation techniques of transducers are similar for most optical-fibre sensors (based on absorption, reflectance, fluorescence, and refractive index changes), the diversity of sensors keeps increasing. Physical alterations on the optical-fibre core, cladding, or end face, give rise to a large variety of sensing structures with different characteristics. Among the many that exist, it is worth highlighting optical structures based on gratings, either fibre Bragg gratings (and modified versions such as tilted or chirped) or long-period gratings; interferometry, standing out Mach–Zehnder (MZ), Michelson, Sagnac configurations, or Fabry–Pérot cavities, among others; or geometry-modified fibres, such as tapered and U-shaped fibres. Special coatings (or films) could also be applied to the fibres, for which metal coatings are the most used. These coatings provide, mainly, higher sensitivity to measurands by exploiting the surface plasmon resonance (SPR) effect. Recently, optical biosensors implementing biorecognition elements have enabled new functionalization and detection capabilities of the fibres. Furthermore, the potential of optical-fibre technology has been remarkably extended by combining optics and microfluidics (optofluidics [
8,
9]) using optical fibres, i.e., optical-fibre optofluidics [
10,
11]. Finally, another degree of flexibility (and diversity) on the design of optical-fibre sensors is imposed by the fibre type and its characteristics. For instance, single-mode, multimode, single-core, multicore, hollow-core, photonic-crystal fibres or polymer fibres. Overall, the potential of optical-fibre sensors is enormous, and a wide range of combinations may be employed.
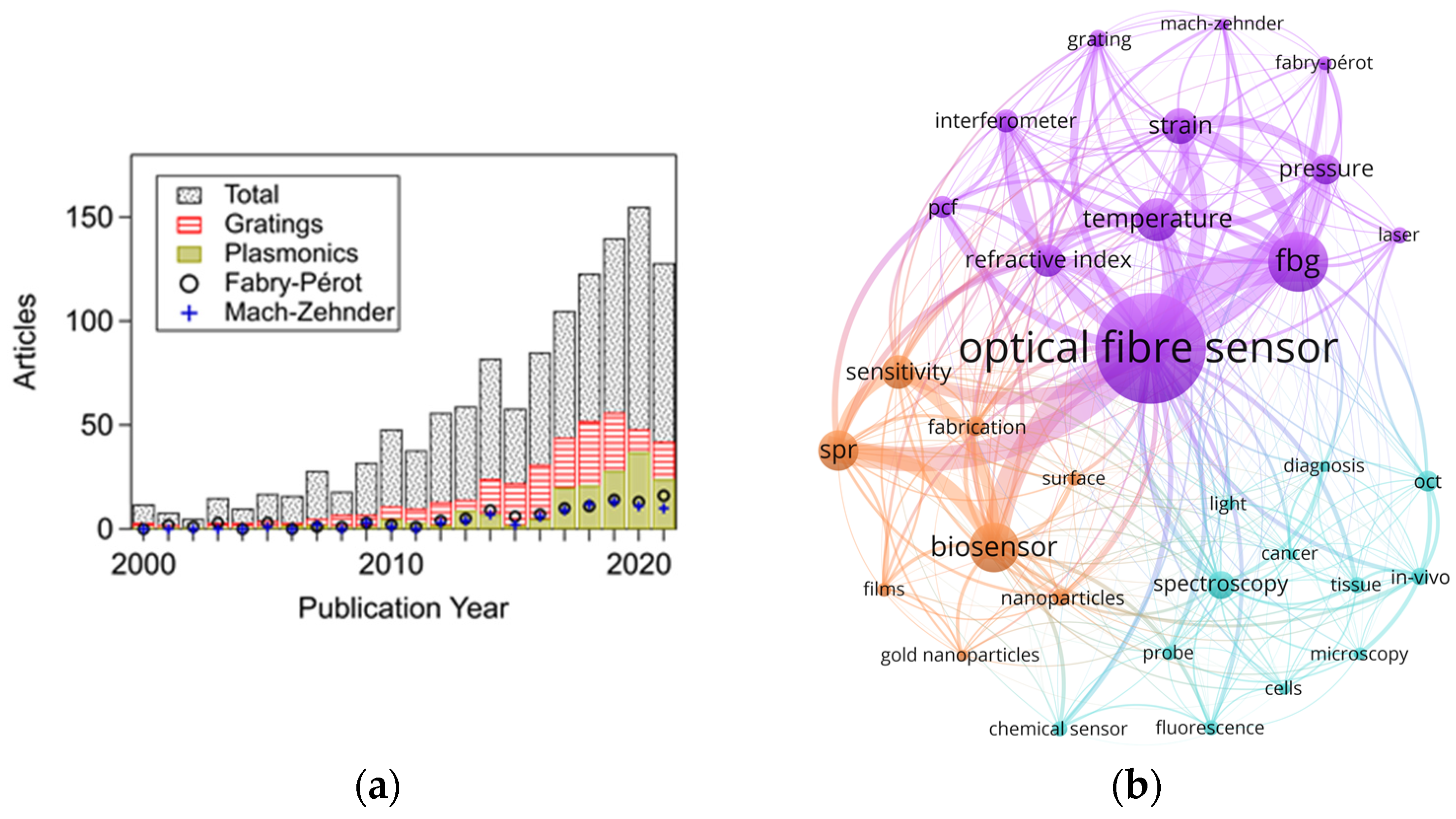
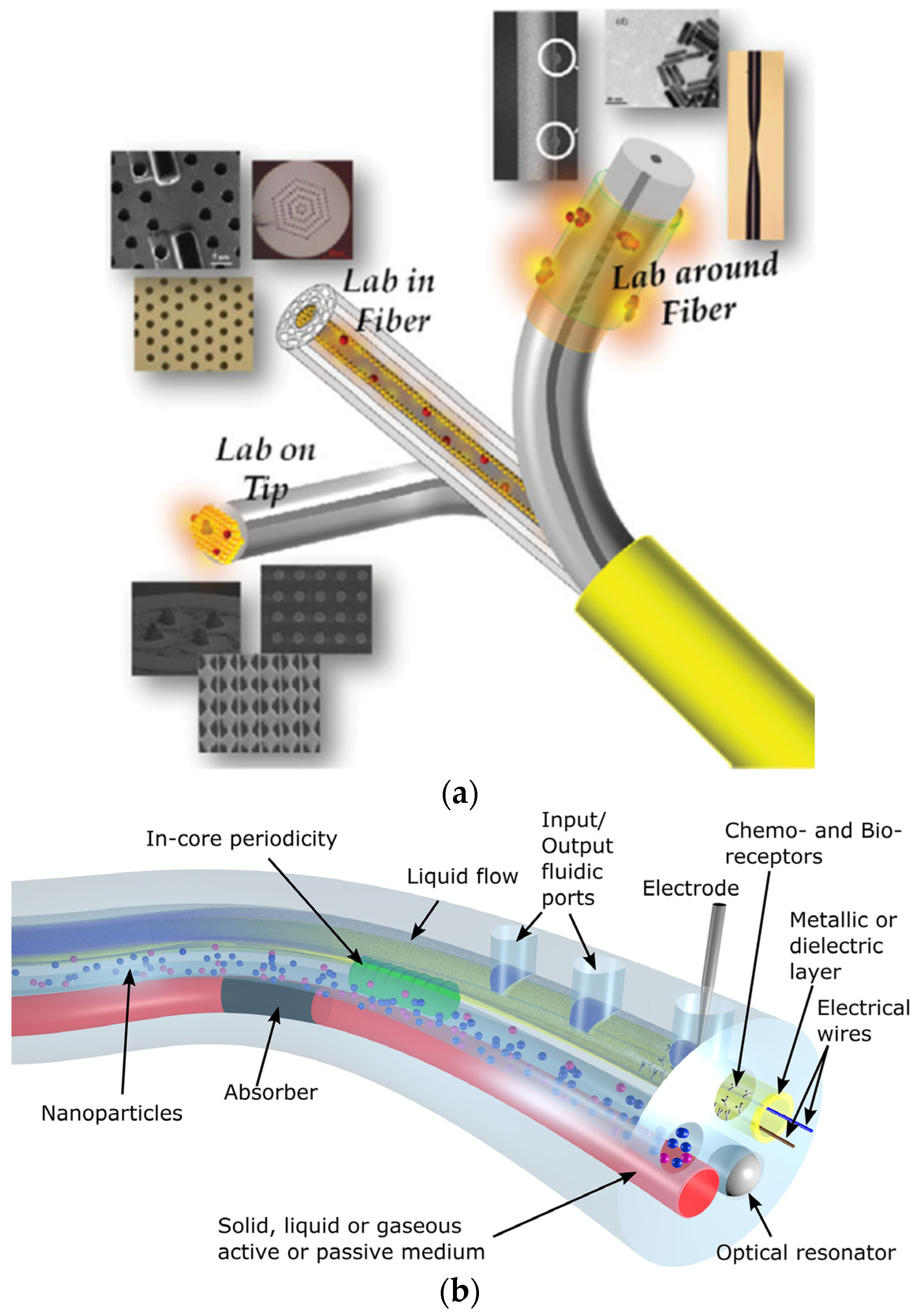
Presently, the application of optical-fibre sensors technology is increasing (
Figure 1a) and progressively reaching maturity in specific biomedical applications [
12]. In this regard, fibre Bragg grating or interferometric sensors (e.g., Fabry–Pérot cavities) are widely used to monitor physical parameters. In contrast, fluorescence-based, SPR-based (or exploiting evanescent field) sensors are primarily investigated to detect biological/chemical parameters. This is supported by
Figure 1b, which shows a network map of keywords found in 1351 journal articles related to optical-fibre sensors for biomedical applications (for graphs regarding optical fibre sensors in general, see
Figures S1 and S2 in the supporting information). In this map, the lines indicate a link between keywords. Thicker lines represent a stronger link between occurrences. Bigger circles correspond to a higher number of events for each keyword. In addition, three clusters are shown with different colours, for which each cluster groups a series of keywords sharing high linking strength between them. This map highlights the sensing techniques, parameters, etc., employed in the biomedical field over the years. Since a significantly higher number of publications correspond to the last decade (over 75% of the total), this decade dominates the keyword occurrences.
Although there has been an increasing interest in biomedical optical-fibre sensors, there is still a low level of implementation [
6,
14]. From the technical point of view, to widen the acceptance and implementation of the technology, optical-fibre sensors may require [
15]: meeting a need other sensors cannot, showing outstanding performance at a similar cost of existing solutions, or significantly reducing their cost.
In this regard, optical-fibre sensors offer many possibilities to develop new medical devices to improve current methods. New technologies and the combination of two or more techniques may allow for enhanced capabilities and functionalities, for example, higher sensitivity, specificity to selected targets, and multiparameter sensing. On the other hand, general challenges still need to be considered: minimization of cross-sensitivities, increased resolution and dynamic range, enhanced stability and reliability, etc. [
16]. Overall, technical innovations, remarkably superior performance, miniaturization, multiparameter sensing in a single fibre, and multiple sensors in a medical probe (including multiplexing), could show a route towards widespread implementation of biomedical optical-fibre sensors. The contribution presented here involves briefly many of these pathways.
This work reviews the latest advances in biomedical photonic sensors based on optical-fibre sensing. The examples described correspond to a selection of the most recent works (mainly within the last five years) intended to convey the advancement and novelty of biomedical optical-fibre sensors for measuring several biomedical parameters. Priority was given to publications dealing with real applications whereas most of the latest advances described are not covered in previous reviews.
This review is divided into three main sections. First, a conceptual section regarding biomedical photonic sensors is provided to establish the basic definition of what should be understood as a biomedical photonic sensor (
Section 2). Then,
Section 3 describes the most recent biomedical photonic sensors based on optical fibres and acting as stand-alone devices. This section describes the latest advancements in sensing physical parameters (vital signs and temperature), biochemical parameters (pH, oxygen, cancer-related and others), including a brief description of multiparameter sensors for lab-on-fibre implementation. Finally,
Section 4 presents fibre-optical probes integrated into medical instruments such as endoscopes, catheters, and needles. It includes fibre-optical probes for spectroscopy and modified probes to sense shape and force.
For information about fundamentals, operation principles of the sensors, and previous works not covered in this review, the reader is referred to the literature regarding optical-fibre sensors applied in the biomedical field [
6,
12,
17,
18,
19,
20,
21,
22]. For an extended list of reviews of optical-fibre sensors focused on biomedical applications (or with biomedical interest), the reader is referred to
Table S1 in the supporting information.
2. Biomedical Photonic Sensors
The detection, capture, measurement, supervision, and control of magnitudes of given objects are requirements of paramount importance in today’s times. Obtaining specific information about a given parameter or measurand (M
x) in any state or domain on/in an object (O
y) placed in a given environment is commonly recognized as a detection process. Sensors are the devices or systems developed to detect and capture physical, chemical, biological, biomedical measurands, etc., translating and reproducing them in the electrical domain to be useful in real applications in today’s world. Photonic Sensors (PS) are the set of devices/systems designed to carry out the faithful reproduction of the measurand in the electrical domain using photonic technologies in their key sensor parts [
23].
In any photonic sensor, the light (L
x) coming from the target/object (O
y) includes the information concerning its specific measurand (M
x), that, after being detected and processed, enables its faithful reproduction in the electric domain. The photons of the light, L
x, from the O
y can be produced by the object itself or could be a consequence of their excitation with appropriate optical radiation or any other source of excitation energy. The light from the target includes information (modulated by the measurand or modulating signal) on several of its main characteristics such as amplitude, phase, frequency, polarization, or any other light characteristic [
24,
25].
Three main parts or subsystems are identified by analysing the requirements to build a real PS: the transducer, the optical channel, and the optoelectronic unit, as depicted in
Figure 2. The optical transducer is the part in which the measurand modulates the light; the optical channel is the part that optically connects the transducer with the optoelectronic unit, and the latter is the part in which the optical signal coming from the object (L
x) is photodetected, amplified, demodulated, processed, and equalized, offering, as a result, an output electric signal (analogic or digital) which is a faithful reproduction of the measurand [
24]. The optoelectronic unit also includes, if it is required, all technology concerning the optical source/s to interrogate or/and pump (L
i,p) the object to induce the appropriate light response (L
x).
When a PS is equipped with some kind of intelligence, in addition to the sensing signal or instead of it, the sensing system can provide an actuation signal; the sensing device is then transformed into a Smart Photonic Sensor (SPS) [
26,
27]. Thus, an SPS can be understood as the photonic sensor system that includes intelligence capable of offering actuation signals to allow appropriate reactions or interventions on/in the object (O
y) from which the L
x modulated light is coming. This intelligence, commonly located in the optoelectronic unit, is created by software that executes specific algorithms.
According to the main technology used to build these sensing devices (mainly in the transducer part), several types or subdivisions of PS can be identified: Fibre Optic, Integrated Optic, Image, Hybrid. Sensors appear when Fibre Optic, Integrated Optic, Image-based or hybrid photonic technologies are used, respectively [
28,
29,
30].
Figure 2.
Illustration of the Biomedical Photonic Sensor concept and its conceptual block diagram. The photonic sensor provides representative and faithful electrical signals of physical, chemical, biological, or physiological measurands on/in a given object or target. When a BPS is equipped with some kind of intelligence and provides actuation signals, it is transformed into a Biomedical Smart Photonic Sensor (BSPS). It is integrated into three main parts: Optical Transducer; Optical Channel and Optoelectronic Unit [
31,
32,
33]. Courtesy of the authors.
Figure 2.
Illustration of the Biomedical Photonic Sensor concept and its conceptual block diagram. The photonic sensor provides representative and faithful electrical signals of physical, chemical, biological, or physiological measurands on/in a given object or target. When a BPS is equipped with some kind of intelligence and provides actuation signals, it is transformed into a Biomedical Smart Photonic Sensor (BSPS). It is integrated into three main parts: Optical Transducer; Optical Channel and Optoelectronic Unit [
31,
32,
33]. Courtesy of the authors.
Overall, a Biomedical Photonic Sensor, BPS, is the photonic sensor to perform detection or/and measurement of biomedical measurands on/in a given object, providing as a result, representative electrical signals of its (object) state [
30]. By using biomedical photonic sensors, measurands of a physical state (such as Body Temperature, Blood Pressure, Blood Flow, Heart Rate, Force, Position, Respiration, Shape Sensing, etc.), of a chemical state (pH, pO
2, pCO
2, Oximetry –SaO
2, SvO
2–, Glucose, Bile, Lipids, etc.), of a biological state (Antigens, Antibodies, Electrolytes, Enzymes, Inhibitors, Metabolites, Proteins, etc.), among others, could be detected or/and measured [
31,
32,
33].
This work focuses on recent advances in biomedical photonic sensors in which optical fibres play a central role, i.e., biomedical optical-fibre sensors (BOFS). For instance, besides serving as light guiding media, the optical fibres act as transducers detecting signals from the measurand and enabling the characterization and calibration measurements of biomedical parameters.
4. Fibre-Optical Probes for Needles, Catheters, and Endoscopy
Optical probes based on fibre optics has been employed for many years in biomedical applications. Fibre optics have been used as a flexible solution to interface the spectroscope and the sample. In this case, the application usually measures a turbid medium (e.g., tissue), using amplitude, polarised reflectance, Raman, and fluorescence techniques. Besides using fibre-optical probes for interfacing, advances in micro- and nano-fabrication have enhanced probes based on gratings. In addition, several designs have been demonstrated inside needles and catheters for force and shape sensing. Another important class of fibres for shape sensing are those based on interferometric effects (Fabry–Perot).
This section is divided into two parts. First, recent advances in fibre-optical probes for spectroscopy are described, focusing on applications in turbid media, such as tissue. After that, recent advances in modified optical-fibre probes used in needles and catheters for biomedical applications are included. The searching of recent publications was restricted to the last five years.
4.1. Fibre-Optical Probes for Spectroscopy
Optical techniques have traditionally been performed in clinical procedures for decades [
116,
117,
118]. From a medical point of view, the different existing optical biopsy techniques offer a detailed tissue fingerprint based on its chemical content [
117,
119]. Consequently, it provides clinically relevant information for detecting normal and cancerous tissue, treatment choice, or its status, among others [
120,
121]. Furthermore, within these optical biopsy techniques, it is possible to highlight fluorescence spectroscopy, fundamentally from optical endomicroscopy (OEM), as well as reflectance spectroscopy, with particular attention to Raman probes. These techniques can be incorporated into optical-fibre-based probes, as they are a genuinely suitable tool for clinical procedures [
120,
122]. Furthermore, they are flexible, handy, allow in vivo in situ tissue interrogation, and are minimally invasive, i.e., they will enable the integration of smart fibre-based devices in catheters with an external diameter of less than 1 mm. Finally, some of the most significant advances made in recent years are presented.
4.1.1. Reflectance Probes
Among the optical-fibre probes related to spectroscopic techniques, those detecting the multiple-scattered light that escapes from the sampling volume are of paramount consideration. These are the reflectance probes [
117,
120]. Typically, in biological tissue, scattered light depends on the structural (which in turn depends on the size and shape distribution of the scattering particles) and chemical (tissue type, metabolic state, blood supply, among others) composition [
123,
124]. As all these optical properties vary spatially and with wavelength, and many studies have employed tissue-inherent diffuse reflectance spectroscopy to distinguish normal and abnormal tissue in vivo [
125,
126].
Typically, reflectance-based fibre-optic probes are based on a single fibre containing the excitation and several spatially distributed collector fibres to capture the reflected signal [
127]. This signal is then processed, and the data is fitted to analytical expressions (diffusion theory) or iterative algorithms (Monte Carlo simulations) [
120]. Although many techniques are based on diffuse tissue reflectance (capturing amplitude, polarisation, phase), those based on Raman scattering stand out above all others regarding the analysis of chemical species. The most relevant fibre probes based on these techniques in recent years are presented below. The selection of works includes only those using femtosecond laser processing for the manufacturing of the fibre sensors.
Within reflectance, Raman scattering detection is a valuable tool to perform histochemical analysis in a label-free, non-invasive, and non-destructive way [
121,
127,
128]. However, one of the challenges of Raman-based probes is that the signal-to-noise ratio is weak [
129]. Only
of the incident light is Raman scattered, and additionally it is
weaker than fluorescence signals [
120]. Furthermore, the laser source itself, the optical fibre, and other elements, introduce unwanted background signals. A background Raman signal is generated when a narrow pump (i.e., laser) passes through a silica fibre. This signal is large enough to overwhelm any signal collected from the biological sample [
128,
130]. Hence, the background Raman signal and the reflected pump signal must be prevented from being collected. Typically, notch filters prevent undesired signals from the laser, whereas the Raman background signal is often avoided using different fibres for collection and excitation. Correct design of the optical-fibre probes is needed to maximise the efficiency in capturing the desired signal [
120,
127,
129].
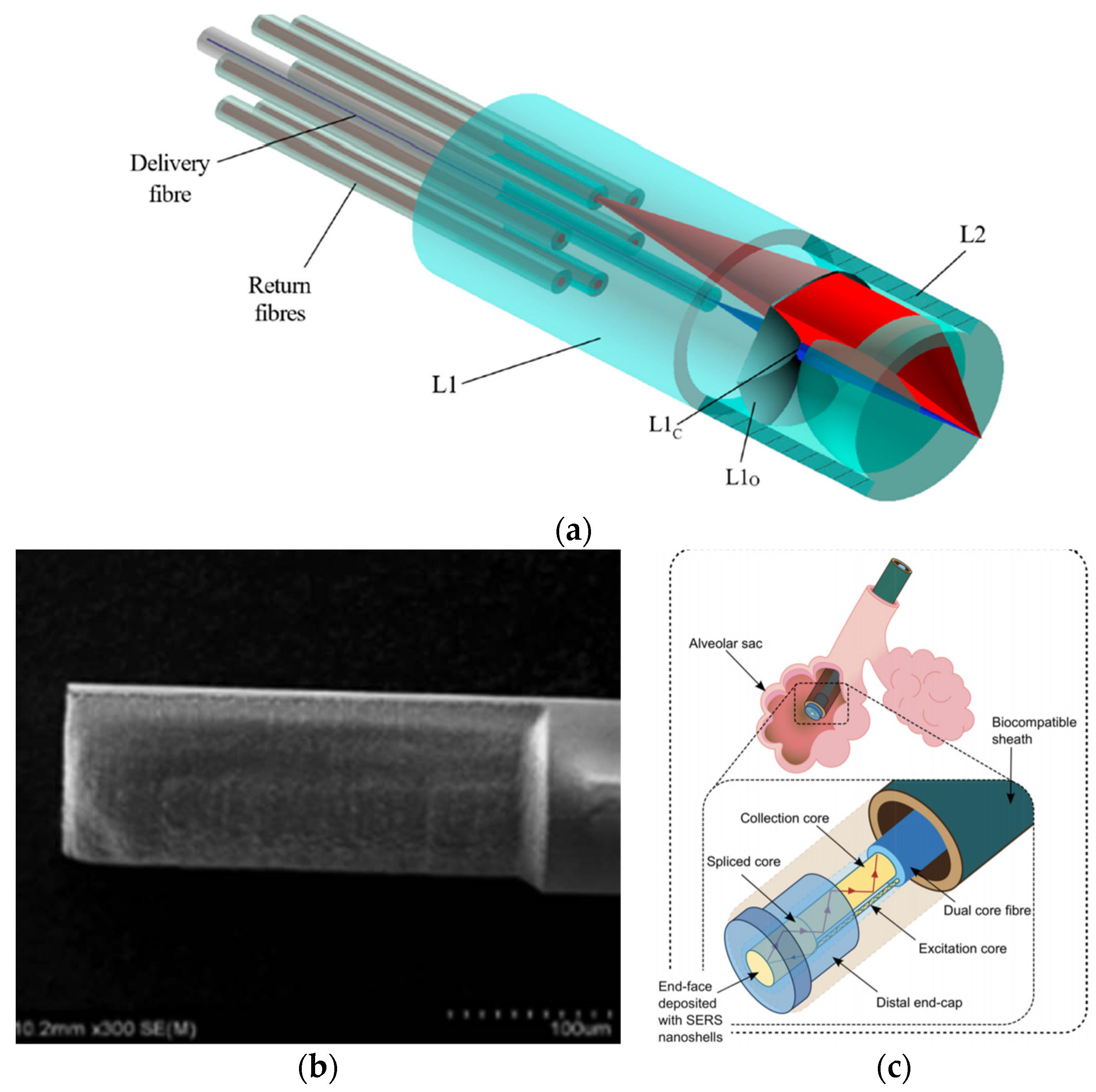
In 2020, Ross et al. developed a novel optical-fibre probe for Raman spectroscopy-based optical biopsy based on a micro-optic system for efficient signal delivery and collection (
Figure 8a) [
129]. The micro-optical system was manufactured by combining femtosecond laser writing and KOH chemical etching (final roughness of 2 nm). With a diameter of 960 µm, the probe has a collection efficiency of 71% over a 0.8 numerical aperture. In addition, measurements were performed on mouse intestinal tissue, verifying the probe results with a commercial Raman microscope.
In other studies, the femtosecond laser is only used to ablate the fibre and deposit nanoparticles, generating surface-enhanced Raman scattering (SERS) probes [
119]. In a 2016 study, a D-shaped fibre probe was made with a femtosecond laser, subsequently depositing silver nanoparticles (
Figure 8b) [
131]. The results showed that the longer the D-shaped length (fs laser zone ablated), the more significant the increase in the SERS signal.
On the other hand, in the same year, a femtosecond laser was used to inscribe a 5 µm period surface grating on the end-face of a 130 µm diameter PMMA optical fibre [
59]. After a photo-reduced deposition of silver nanoparticles, it was shown that the SERS signal is increased by around four times concerning the non-laser-processed structure. Due to the small size of the optical-fibre probes, it is possible to use them to analyse or treat tissues that are difficult to access, such as alveolar sags (
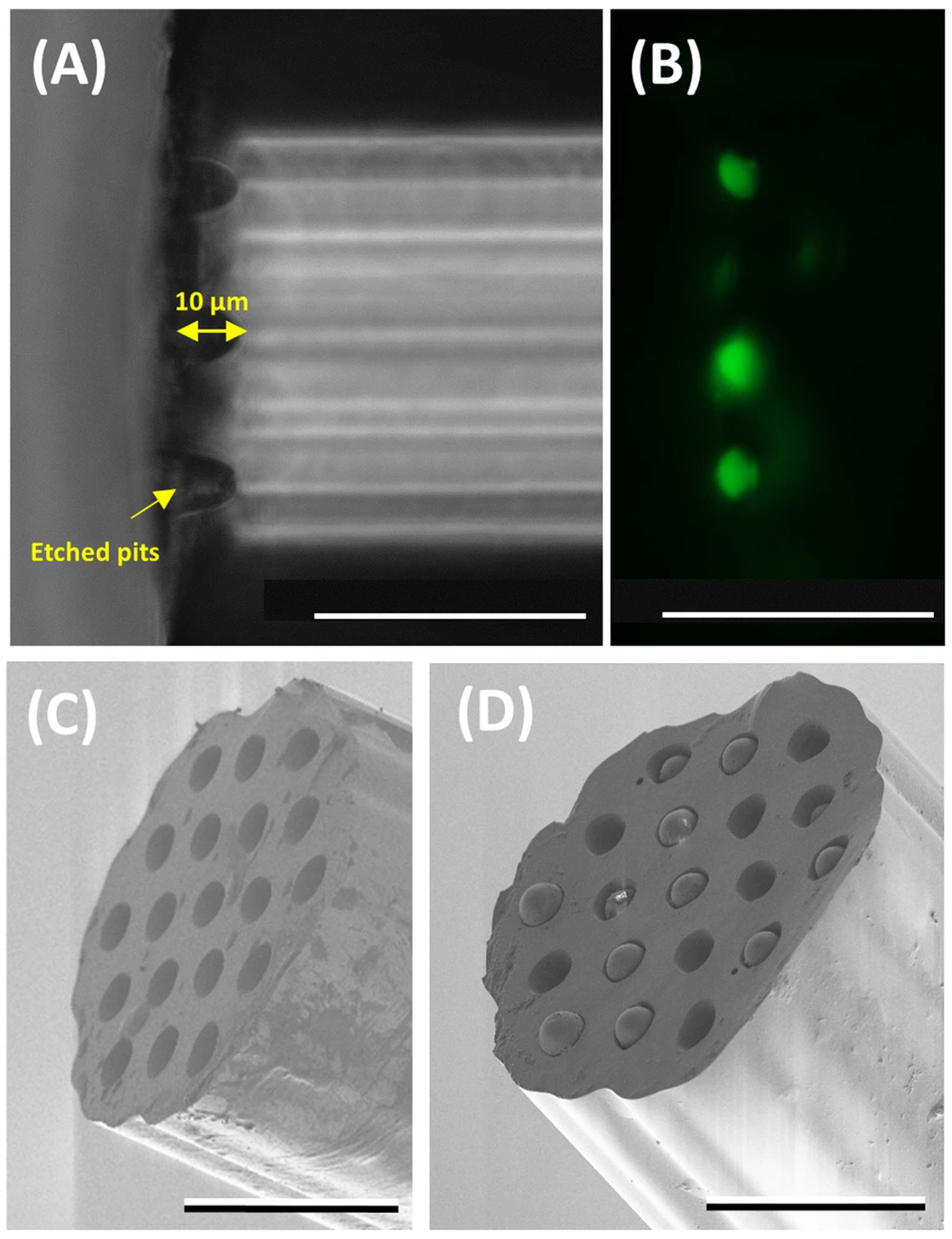
Figure 8c). Choudhury et. al. developed an endoscope optrode based on an asymmetric dual-core optical fibre on the distal end face in which gold nanoshells (to perform SERS) have been deposited [
130]. As a result, a
100-fold improvement in signal to background (delivery and collection light paths are separated) is achieved. Hence, the measurements are no longer limited by the undesired Raman contribution from the fibre. Additionally, a fused silica endcap was manufactured by femtosecond laser inscription and selective chemical etching to provide robustness to the probe. Its performance was demonstrated for multisite pH detection with measurements in the respiratory acini of an ex vivo ovine lung model. The accuracy of the measurements was ±0.07 pH units.
4.1.2. Fluorescence Probes
In this case, the latest developments in this field employ technologies other than femtosecond lasers. They are mostly related to coherent fibre bundles (CFB), also known as imaging fibres [
120,
132,
133]. It is known that different human tissues contain chromophores, whose fluorescence intensity and spectrum shape are strongly dependent on the characteristics of the excitation light source [
120]. Numerous clinical studies have also shown that fluorescence spectroscopy allows the determination of an abnormal state of human tissues in the brain, head, breast, skin, or gastrointestinal tract, among others [
117,
125].
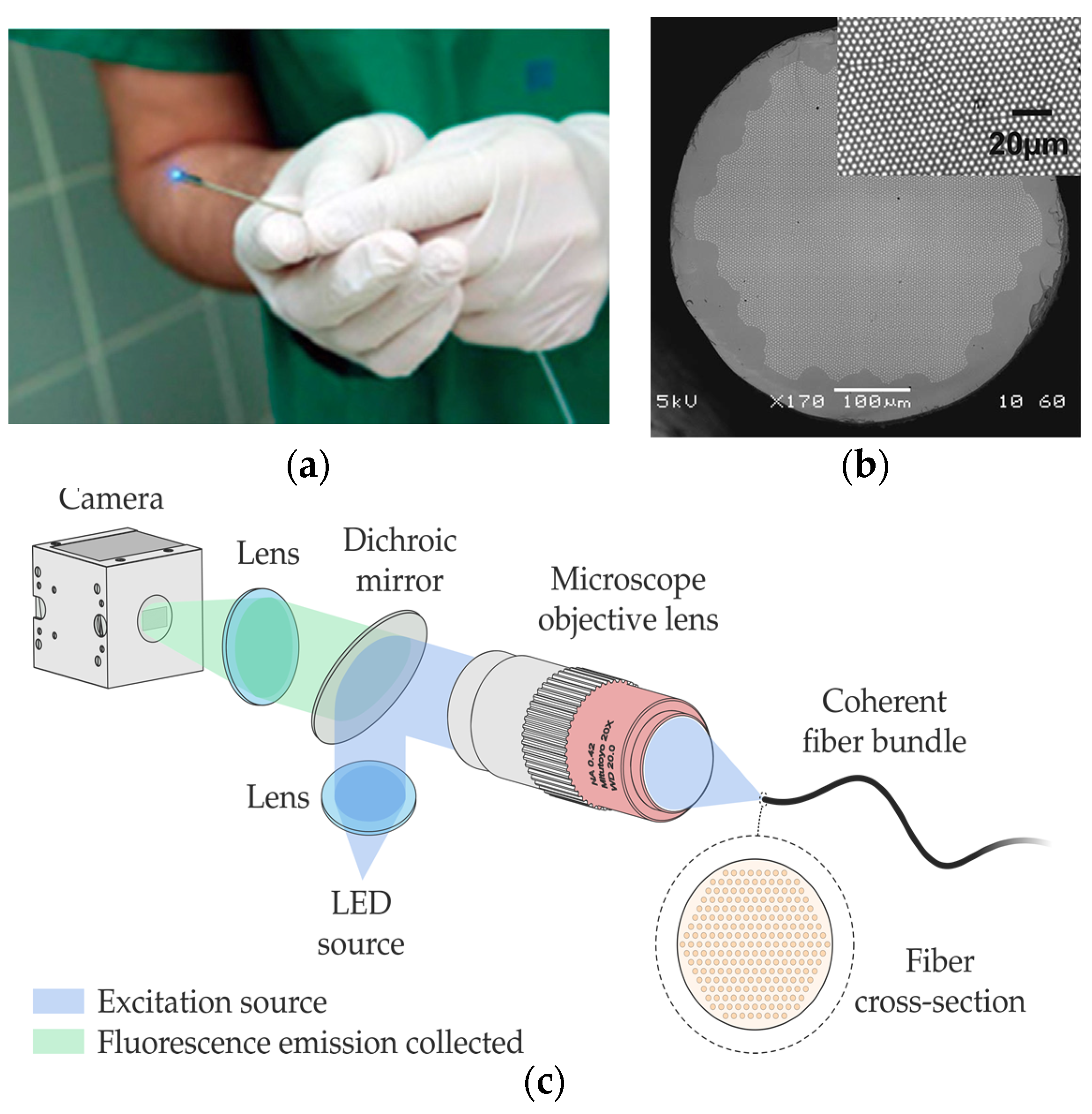
Among the different optical-fibre probes used in fluorescence (
Figure 9a), there are approaches based on classical and simple single-pixel measurement (one-excitation and one-collection fibres) [
120] and multipixel measurement [
134,
135], including fibre-based optical endomicroscopy (OEM) [
132,
136] with potential for depth map** [
132].
Within the latter field, there are high-resolution imaging fibres. An imaging fibre comprises thousands of cores (
Figure 9b), each of which acts as a pixel, transmitting the corresponding part of the fluorescence image located at the distal end of the fibre [
132,
137]. A typical fluorescence image setup is depicted in
Figure 9c. High-resolution imaging with these fibres is achieved by minimizing the distance between the cores (centre-to-centre pixel spacing ranges approximately from 3 to 10 µm). However, this distance is limited by a cross-coupling signal between the cores. There are different ways to reduce cross-coupling and thus avoid resolution degradation: high refractive-index contrast between cladding and cores, air-separated cores, or fibres with absorbant cladding material, among others. However, these are all options with high manufacturing costs, limiting their practical use.
Stone et al. developed (in 2017) low-contrast index imaging fibres with adjacent cores of different sizes [
137]. For the hexagonal and square array fibre, these fibres have up to 12,247 and 8100 cores, respectively. They used mass-produced materials, such as multimode telecommunications preforms (OM1 PCVD), which makes their potential use in practice low-cost. Building on this study, in 2020, Parker et al. analysed the effect of cross-coupling on the 8100-core square-array imaging fibre [
138]. In addition, a novel multifunctional endoscopic fibre based on this CFB was developed in 2018 [
136,
139,
140]. The low-contrast imaging fibre (450 μm corner-to-corner field of view) also contains two capillary channels for fluid delivery/extraction. This fibre was used to detect fluorescently labelled bacteria in lung tissue in ex vivo human lungs.
In 2017, Lukic et al. developed an endoscopic multimode fibre probe for nonlinear imaging, such as anti-Stokes Raman scattering (CARS), second harmonic generation (SHG), and two-photon excited autofluorescence (TPEF) [
141]. The design, compact and free of moving parts, is intended for in vivo tissue investigations. A GRIN lens collimates the excitation laser light from the imaging fibre, passed through a long-pass filter and a diffractive optical element, and is focused by a final GRIN lens. On the other hand, the sample signal is collimated by the last GRIN lens, deflected by a prism mirror, and focused by another GRIN lens on the collecting fibre. In any case, there are recent examples of using fluorescence-based optical-fibre probes for cancer detection [
142], for instance, by pH sensing [
143]. Also noteworthy is a study from 2020, that detects β-sheet amyloid fibrils associated with neurodegenerative diseases [
144].
4.2. Modified Fibre-Optical Probes
In recent years, numerous articles have addressed the difficulties in controlling some parameters in catheters and needles in the medical field (e.g., shape, force). Fibre Bragg gratings and Fabry–Pérot systems are the most used techniques. The following section summarises a selection of the latest advances (last five years) on modified optical probes based on these two techniques. A brief state-of-the-art is included at the beginning of each section.
4.2.1. Fibre Bragg Gratings
Fibre Bragg grating is the most used technique for shape and temperature sensing, enabling controlled navigation in endoscopy and measurement of the catheters’ position. In addition, this technique is also used for shape and force sensing of medical needles that have a simple bending profile. The combination of various FBGs allows for the calculation of the curvature and direction angle. Some pioneering works surged at the end of the 2000s. Miniaturised fibre-optical sensors based on FBGs were proposed to be integrated into robotics for force feedback [
145], and endoscopes for shape detection [
146]. After that, the contributions have grown considerably, one of the most typical configurations is the combination of three fibres arranged over the structure [
147,
148,
149]. The error that the core geometry can introduce can be surpassed with multicore fibres [
150]. Besides, other geometries have been investigated [
151]. For shape reconstruction, there are three main approaches proposed by Roesthuis [
149], Moore [
150], and more recently by Cui [
152].
Nowadays, several examples of FBG sensors for sha** have been investigated for their use in different medical areas. For example, an optical-fibre FBG sensor is proposed for possible use in retinal microsurgery [
153]. This type of surgery requires precise control of the instruments in the eye’s interior (due to the delicate tissue in this area). The advantage of this proposal is the axial force-sensing function thanks to the three degrees of freedom (DOF) force sensing microneedle sensor. The sensor uses three optical fibres with dual FBGs and a custom algorithm to decouple the axial and transverse forces. The fibres are attached longitudinally onto the surface of a nitinol tube. This configuration allows the introduction of an injection catheter by the remaining hole and measurements with resolutions of 0.124 mN for transverse forces and 0.74 mN for axial forces (stable results between temperatures of 35 to 37 °C).
Another similar work can be found in [
154], in which three fibres with FBGs measure the three-axial force. The main difference is that two fibres are located eccentrically around the structure, and the other one is placed at the resulting hole at the centre of the structure. The device is designed to work in endoscopic surgical robots giving haptic feedback to the surgeon (it could also be used in laparoscopic robots or catheters). A lateral force sensitivity of 838.386 pm/N is demonstrated with a measurement resolution of 1.19 mN. The maximum error was only 6% in a commercial force sensor (Nano17).
Also based on FBGs, the sensor proposed in [
155] is designed to detect the interaction forces between the catheter tip and the tissue. The authors propose a 3D printed sensor consisting of a hollow core cylinder, which detects lateral forces. In this case, four optical fibres are sued to decouple the force and temperature parameters. A minimum resolution of 0.52 mN for lateral force (between −0.8 to 0.8 N) and 0.63 mN for axial force (between 0 −0.8 N) is demonstrated. An error below 6.5% is obtained for temperatures ranging from 25–50 °C. A similar device (4 optical fibres) was demonstrated with a maximum shape error of 3.43% [
156] and with 1.05 mm error [
157].
Another recent proposal for the detection of catheter tip–tissue interaction force can be found in [
158]. In this case, the authors combine a symmetrical force-sensitive flexure-based catheter distal sensor with four FBGs for force and temperature decoupling and detection. Thanks to this, the proposed design has improved resolution and sensitivity than reflection-based sensors, avoiding the FBG limitations (chir** failure and low repeatability). In addition, in vivo experiments (cardiac catheterisation) demonstrate a resolution of around 4.6 mN within the measurement range of 0 ∼ 3.5 N [
158,
159]. Finally, FBGs have also been proposed to measure the deflection angle for vascular access [
160]. The device is based on three FBG sensors on an 18 G vascular access needle (90 mm long). The preliminary test has shown a 40° range of where the artery may be located.
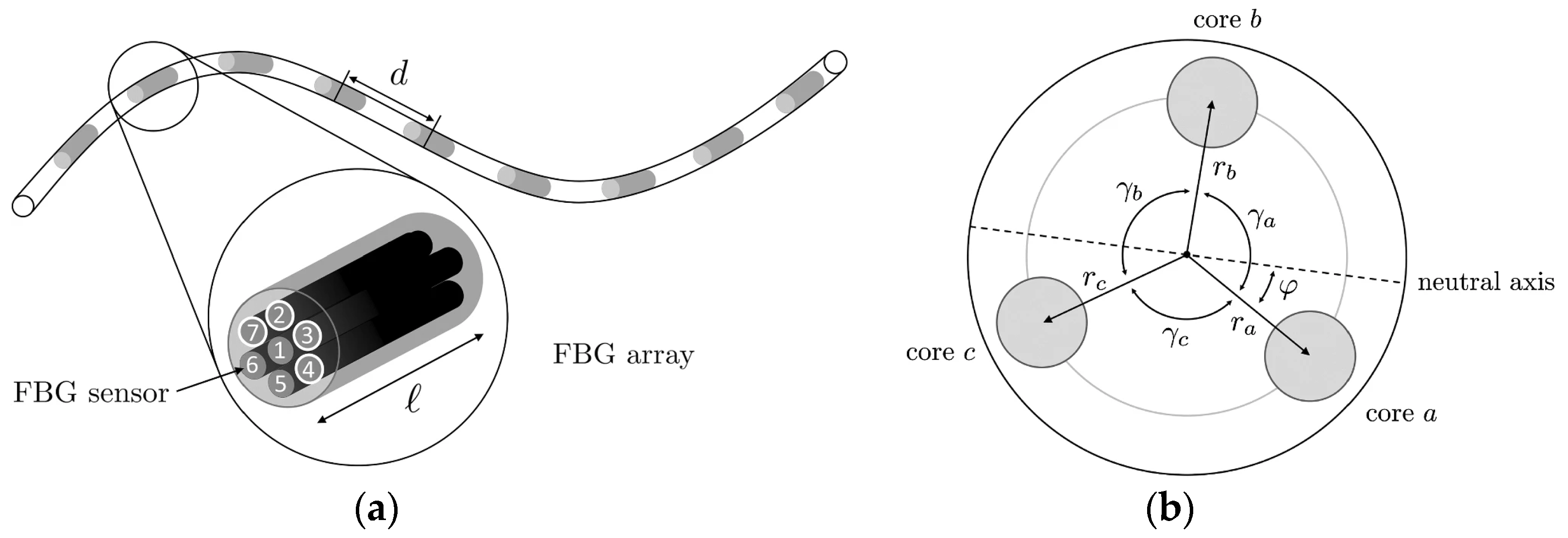
The study of shape sensors using multiple cores can also be found [
161]. As shown in
Figure 10a, a multicore fibre (seven cores) is used to measure the shape of flexible instruments for endovascular navigation. Different configurations are studied, concluding that at least three linear independent cores are needed for proper 3D reconstruction. It must be considered that the performance of distinct cores varies significantly due to differences in the manufacturing process. An asymmetric configuration, as shown in
Figure 10b, can reduce this effect. However, the higher the number of cores used, the better similarity in performance of the cores [
161]. The results show an average error of 0.35–1.15 mm and a maximal error of 0.75–7.53 mm over the whole 38 cm sensing length. When the system is used in an endovascular scenario, a maximum error of 2.11 mm is obtained.
A different technique to measure the shape of catheters and needles in the medical field is optoacoustic FBG [
162]. An acoustic-optic FBG sensor demonstrates the tracking of the catheter position during interventional magnetic resonance imaging (MRI) [
162]. The traditional means to visualise the catheter are the inclusion of magnetic and contrast agents [
163], or the inclusion of radio frequency (RF) receiver antennas [
164]. The first option can cause obstruction and distortion in the MRI images, whereas the second option can suffer from induced heating in the transmission lines of the RF signals due to resonance effects. For this reason, with this solution, the FBG is used as a dielectric transmission line for the RF signal. The RF signal is converted to an electrical signal by a small coil. The electrical signal is converted to acoustic waves by a piezoelectric transducer, and these waves modulate the reflected light of the FBG. As a result, the measured Bragg wavelength has a linear response concerning RF signal amplitude (flip angle).
In addition, FBG can also be used to measure puncturing force and deflection angles. In the past, several designs based on optical fibres (FBGs or reflection methods) were proposed to work in needles and catheters. The proposed applications can be microsurgery [
165,
166] (FBG); minimally invasive surgery [
167,
168,
169] (reflection); micromanipulation [
170] (FBG); or other surgical disciplines [
171,
172] (reflection) [
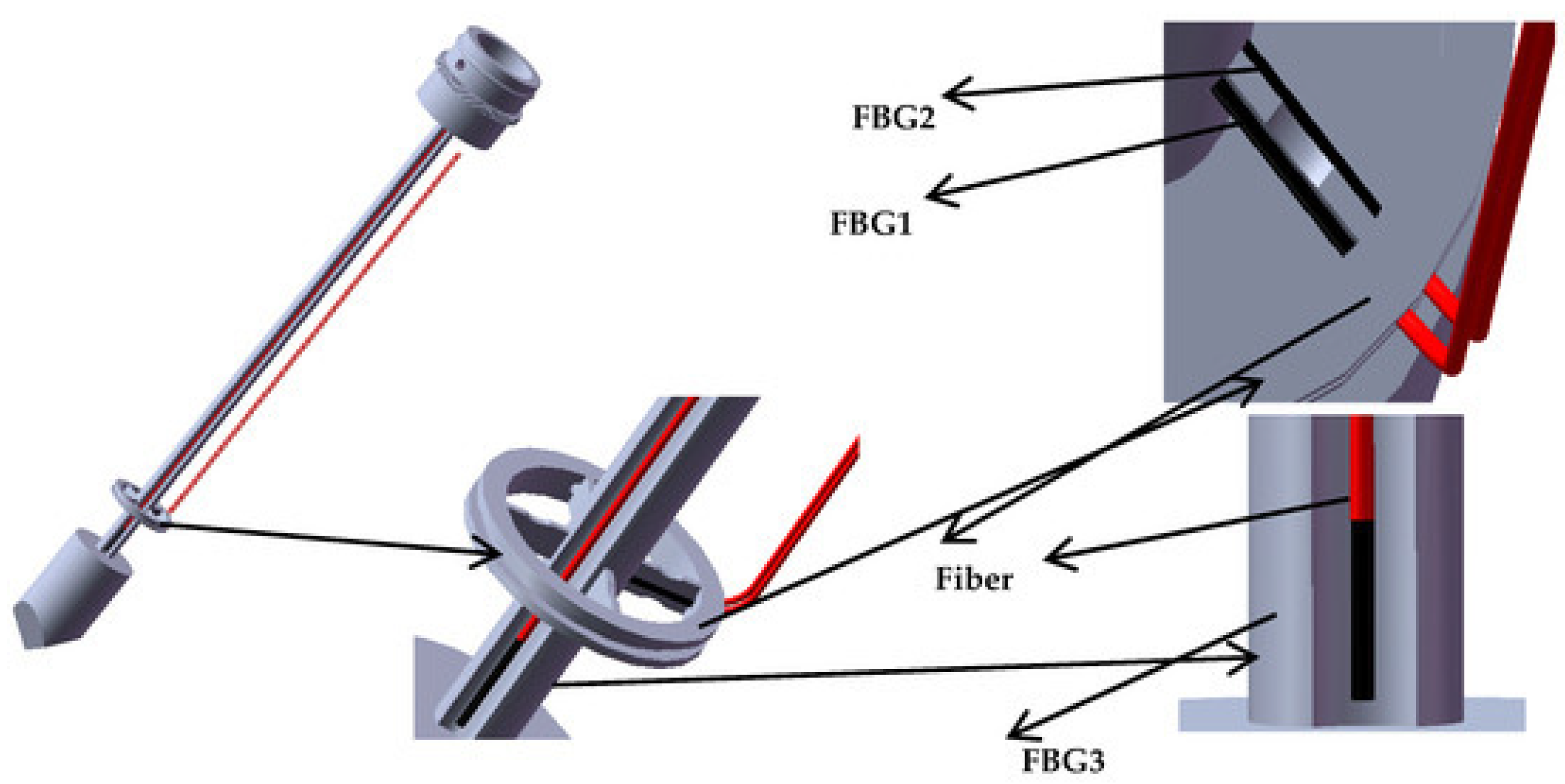
173] (FBG). The referenced prototypes have shown promising results; despite this, some issues are still to be surpassed. Most force sensors are designed to be mounted in the handle of a minimally invasive surgery instrument. They cannot distinguish the contact force applied at the instrument tip and the contact force at the tissue. Furthermore, they cannot sense the torque change but only sense axial force during puncture surgery. Focusing on FBG sensors, in the last five years, some proposals have improved previous results. For example, in [
174], a new type of FBG sensor for measuring the puncturing force in needles is proposed and demonstrated. The sensor uses a reference fibre method implementing three FBGs. As shown in
Figure 11, the first fibre and the second reference fibre are placed on the upper and lower surfaces, and the third fibre is placed over the puncturing needle cylinder. With this configuration, the torque is estimated by the difference of Bragg wavelength between first and second fibres. The axial force is measured by the difference between the Bragg wavelength of the third and second fibres. This sensor has the advantage of distinguishing axial forces at the tip and tissue (sensitivity of 0.089 nm/N) as well as changes of torque (average sensitivity of 22.8 pm/mN·m).
Carotenuto et al. proposed FBG sensors in epidural procedures [
175]. The system was tested with real tissue [
176], providing a preliminary indication of the potential of this technique to localise the epidural space. Some related works can be found in [
177,
178].
Finally, a multiparameter measurement FBG-based needle is proposed in [
179]. In this case, the FBG fibre is made sensitive to chemical parameters by a polymer functionalisation of the fibre optic. Specifically, the authors make the FBG sensitive to relative humidity, resulting in a Bragg wavelength shift of ~0.38 nm for relative humidity changes from ~20% to ~90%. In addition, the FBG-based needle sensor can measure the breathing rate during mechanical ventilation, allowing the relative humidity change during this process to be followed.
4.2.2. Fabry–Pérot Interferometer Sensor
The sensitivity to lateral forces is considerably higher than axial forces due to the axial rigidity of the fibre. FBG sensors have been proposed to measure both forces, as described previously. However, a better solution to measuring axial forces is accomplished by Fabry–Pérot-based sensing. Fabry–Pérot interferometer (FPI) sensors have been used for several applications, e.g., needle insertion force [
180,
181], microsurgery [
182] or minimally invasive surgeries [
183].
A demonstration of the integration of an FPI sensor into an 18-G needle has been reported [
184]. The sensor has good accuracy (maximum error of 65 mN/10 N) and possesses an intrinsic low cross-sensitivity to temperature (12 mN/°C). However, the strength required for placing the sensor in smaller diameter needles may be not sufficient. For this reason, the authors recommend placing the FPI sensor on a microcapillary tube (e.g., Invar capillary) or a thin polyimide film.
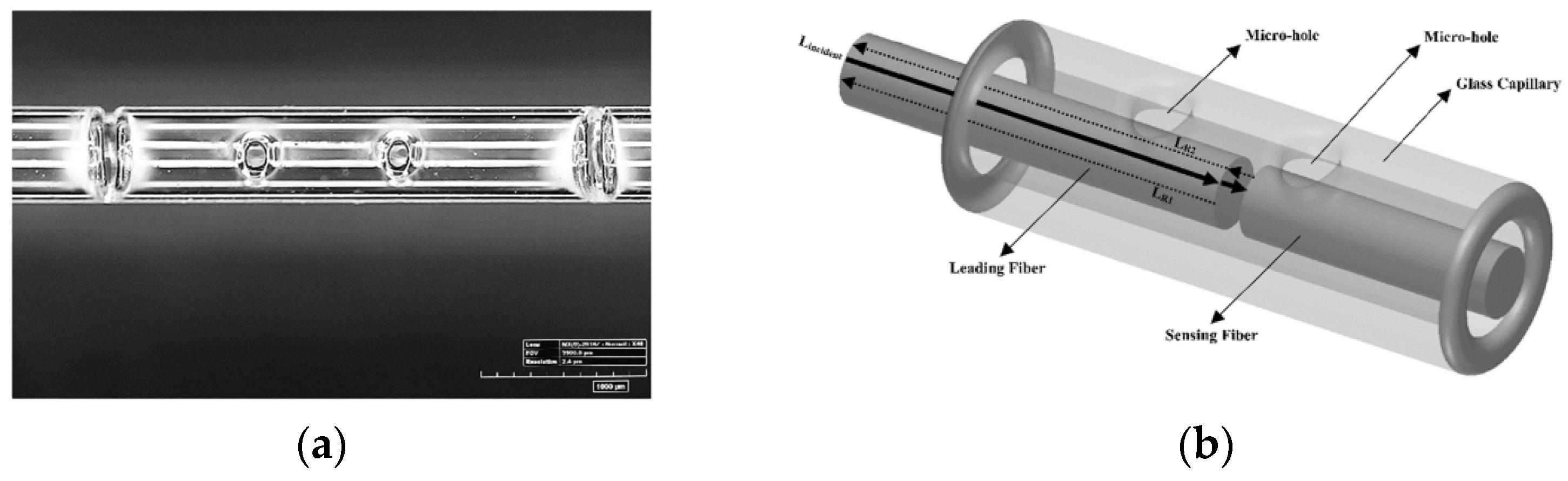
Later, an FPI sensor is proposed for prostate biopsy needle interventions under MRI [
185]. In this case, the cavity is different from previous proposals made by a hole in a glass capillarity. Two single-mode fibres encapsulated in the glass and at both sides of the hole are used as semi-reflecting mirror surfaces (authors propose coating to improve the signal-to-noise ratio and resolution). They measure an axial force up to 20 N (higher than typical values in prostate interventions). In 2019, the same authors published an extended article with a complete set of the custom FPI sensor integrated into an 18-G nitinol biopsy needle. The sensor slightly differed from the previous proposal mentioned above, as the fibres are fixed in the capillary by two microholes (
Figure 12a). In contrast, the cavity is formed by the distance between fibres (
Figure 12b). The FPI sensor has been tested in a prostate phantom under real-time MRI guidance [
186]. The FPI sensor has a force measurement range of 0–13 N with 0.1 N resolution. An improved version was published in 2020. The surfaces of the single-mode fibres were coated with Ti, obtaining a measurement range of up to 20 N and a resolution of 0.03 N [
187].
Using a similar concept but in a multimode fibre, a FPI-based sensor is demonstrated to measure the needle curvature and temperature [
188]. A maximum sensitivity of −0.152 dB/m
−1 with a resolution of 0.089 m
−1 is obtained for curvature. The resulting cross-sensitivity to temperature is small.
Finally, FPI sensors for MRI-guided robotic systems have also been presented in [
189] (which is an optimised version of [
180]). One challenge of this sensor is the loss avoidance of the tactile sensation of tool manipulation. One solution is to use force sensors to measure the insertion force and use haptic devices to display to the clinician. One of the main challenges for using sensors in MRI systems is the emission of RF signals. For this reason, this application is suitable for FPI sensors. Furthermore, due to the small size of FPI sensors, they could be integrated into tiny biopsy needles.
5. Summary and Conclusions
A review of the latest results on biomedical photonic sensors based on optical fibres has been presented. The articles were classified into different categories. First, the BOFSs focused on measuring physical (vital signs, tissue temperature) and biochemical parameters (oxygen, pH, cancer-related and others) were presented. Second, the first publications towards the evaluation of lab-on-fibre technology for medical applications were described. Third, some novelties in the use of photonic or optical probes in medicine were covered.
There has been significant novelty in optical-fibre sensors since the last reviews on biomedical applications of optical sensors were published. Examples of outstanding optical-fibre sensor performances, new methods, optical probes, and sensing strategies have been presented and detailed below.
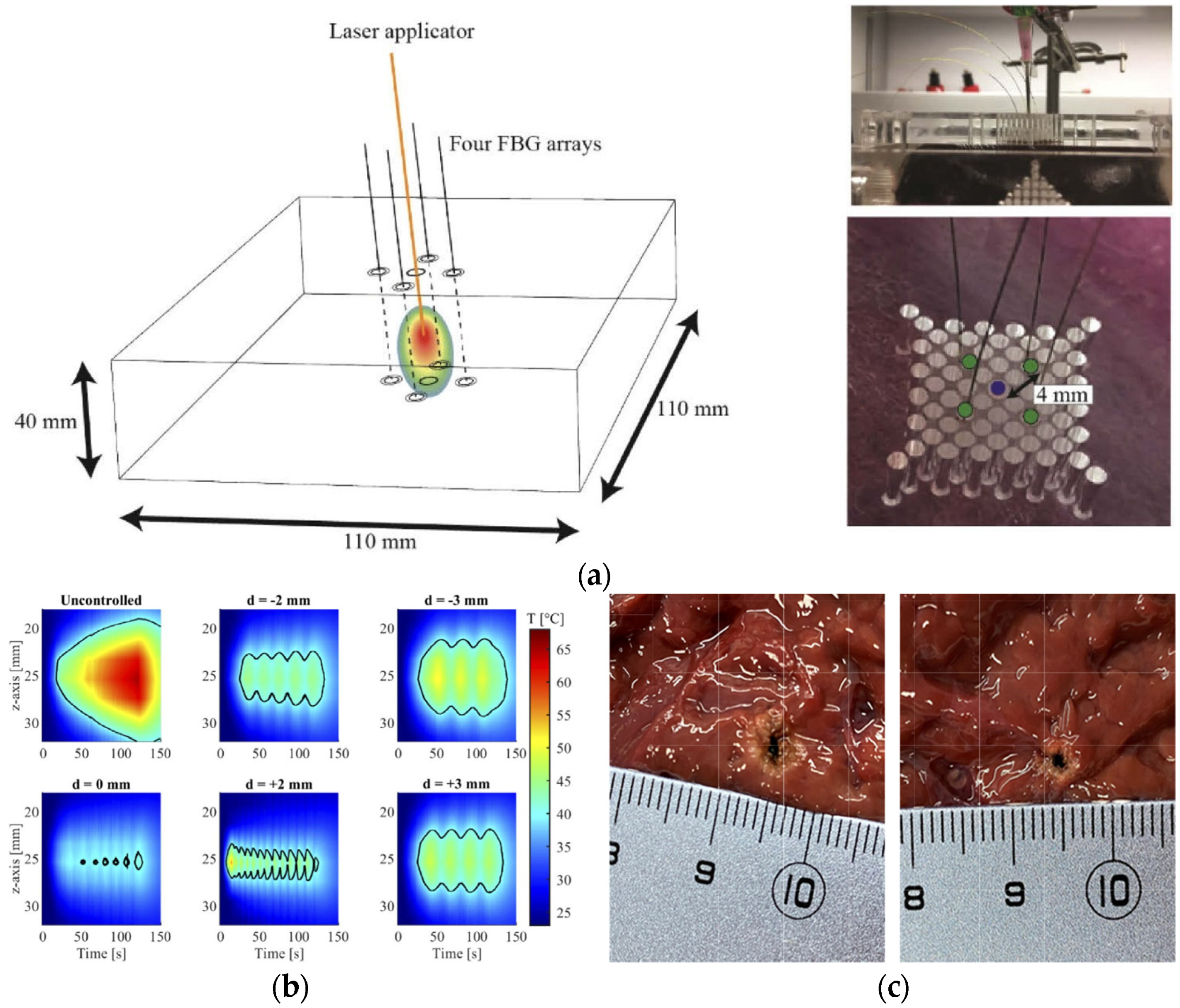
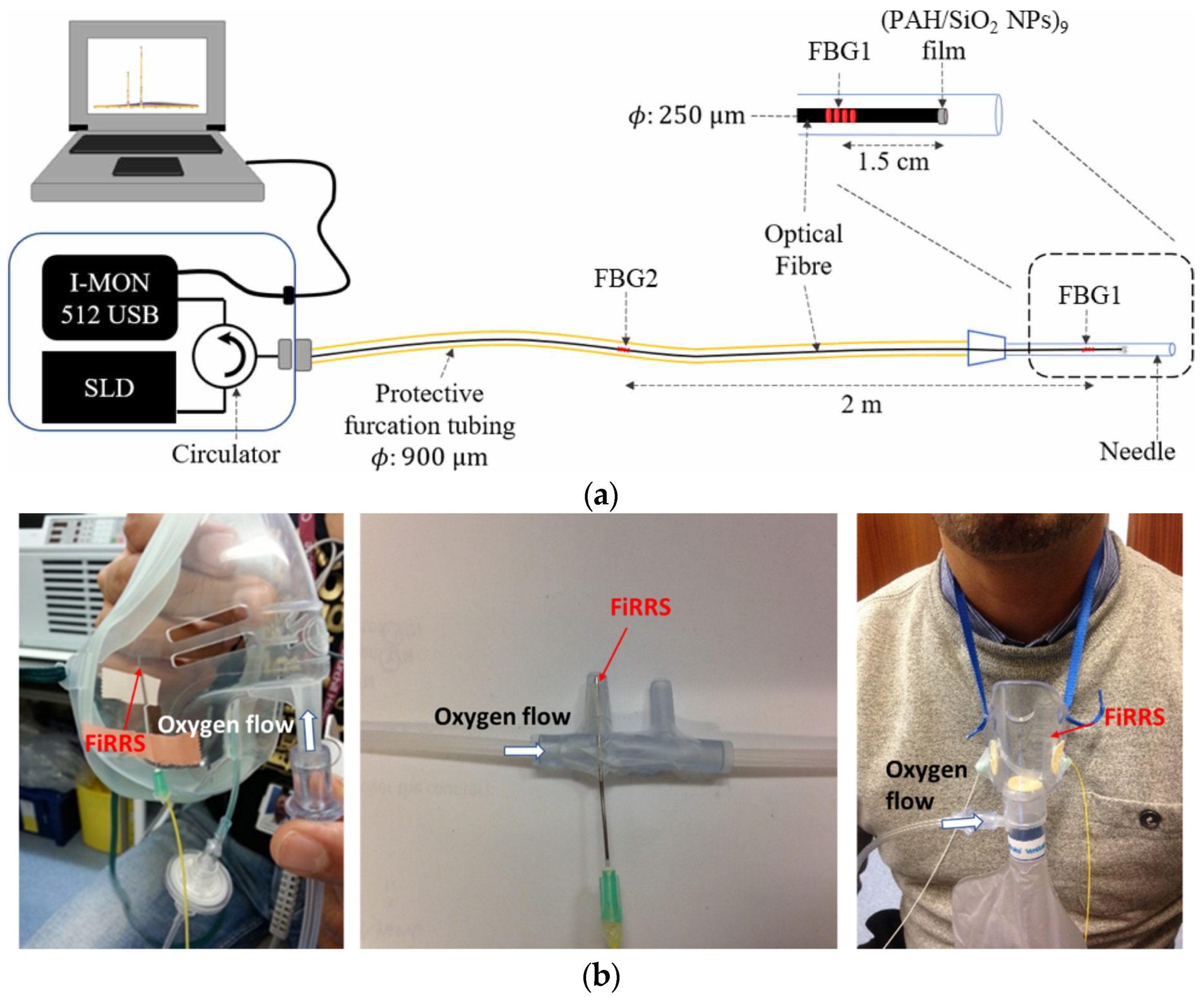
Spatially resolved temperature measurements have reported several technical advancements with a strong focus on real-time temperature monitoring of tissue laser ablation. For instance, the continuous temperature control during laser ablation, including preplanning (modelling) information, has been reported in a real application (interstitially) with excellent results. Other works have tackled the measurement of the dynamic response of temperature of the sensors and 3D temperature map**. Most sensors use FBGs, and a comparison between different modulation techniques of transducers has also been reported. Regarding vital-sign monitoring, a comparison of other sensing techniques, and potentially low-cost optical sensors tested in a clinic environment (based on specklegram) have been reported to monitor heart rate and motion of patients. Furthermore, fibre-optic respiratory sensors incorporated into oxygen delivery devices and sense humidity have been developed and demonstrated. The higher level of maturity in physical parameter monitoring is exemplified as most articles include systems combining different sensors and medical instruments in real-time applications. We identify cases in which optical-fibre sensors directly meet a need in biomedical applications, for instance, capillary refill measurements.
Regarding biochemical parameters sensing, in particular pH sensing, optical-fibre sensors insensitive to bending and very high sensitivities have been reported. Outstanding optrodes for pH and oxygen sensing on multicore functionalized fibres were reported, in which each core could act as an individual transducer. Recently, time-resolved measurements were proposed as an additional tool providing insight into the role of the density of fluorophores, and in general, on fluorescence dynamics. Regarding oxygen, a novel interstitial diffuse optical probe combined with diffusion transport-based modelling allowed the biological composition of tissues to be retrieved, thus enabling the characterization of blood fraction and oxygen saturation in tissue. This method has strong potential for use during light-related therapies. Furthermore, alternative approaches based on SPR and oxygen transport mechanisms through haemoglobin have been reported for dissolved oxygen sensing. Other biochemical parameter sensors were covered, primarily based on the plasmonic resonance effect, including biorecognition elements and innovative strategies with a few tested in vivo. Some offer excellent sensor properties, outperforming, in some cases, traditional sensors.
Optical probes for endoscopy based on Raman backscattering measurements have been reported, incorporating separate fibres to avoid undesired Raman signals and pH detection in an ex vivo ovine lung model. Fibres for spectroscopy imaging have been developed, including outstanding breakthrough developments that allowed depth map** and nonlinear imaging. Optical probes for shape sensing (primarily based on FBG and FPI) have been tested inside needles (including multiparameter sensing) and catheters. Applications ranging from sensing between tip and tissue to MR-guided robotic systems, among others, were used on prostate phantoms in real-time under MR guidance.
Overall, the enormous diversity of optical-fibre sensors has been enlarged with the introduction of new capabilities for sensing. For example, besides using metal coatings or NPs to exploit SPR and SERS effects, they have been combined with other structures (e.g., FBG or tilted FBG) to provide further flexibility and opportunities in the biomedical field. On the other hand, biosensors have strong potential for the diagnosis/identification of biomarkers for cancer, and optical-fibre flow cytometers have been remarkably attempted. Thus, biosensors show a pathway towards achieving a better detection limit for many biochemical parameters and targets. However, just a few examples can be found for in vivo applications. Hence, a higher number of studies and an increase in the statistics are needed to test these sensors.
In general, multiparameter-sensing platforms are pursued, including lab-on-fibre devices. In this regard, several multiparameter optical-fibre sensors have been demonstrated with potential for biomedical applications. Moreover, a couple of recent examples towards lab-on-fibre devices have been reported. It is a promising approach since it could allow a better understanding of biophysical processes by simultaneously measuring several parameters in real time. Upon these demonstrations, it can be expected that multiparameter sensing in a single fibre, and the implementation of multiple sensors and multiplexing techniques into a single device, could potentially reduce the cost of the systems.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}