
Development of an Improved Rapidly Exploring Random Trees Algorithm for Static Obstacle Avoidance in Autonomous Vehicles

Abstract
:1. Introduction
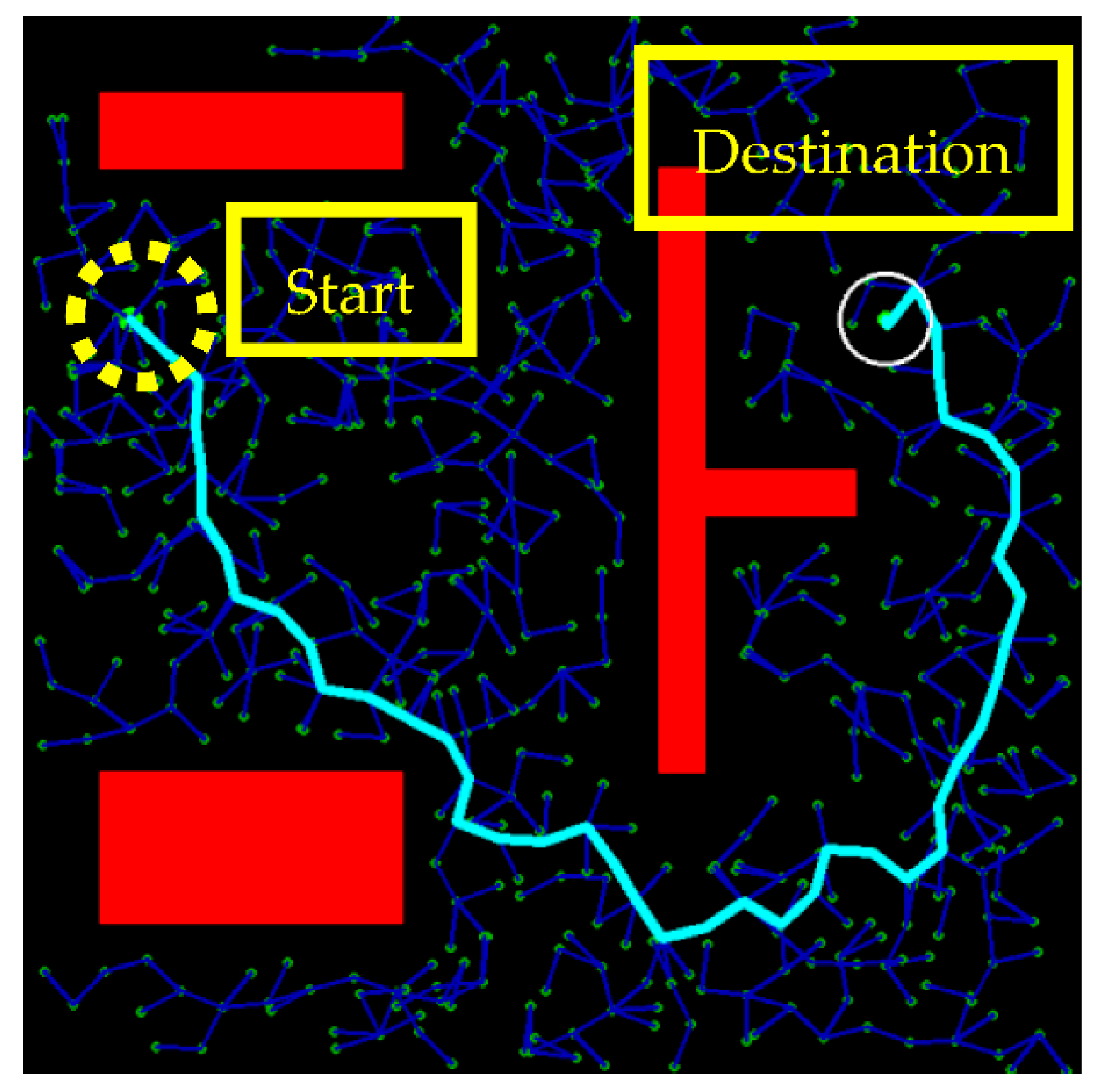
2. Rapidly Exploring Random Trees (RRT) Algorithm
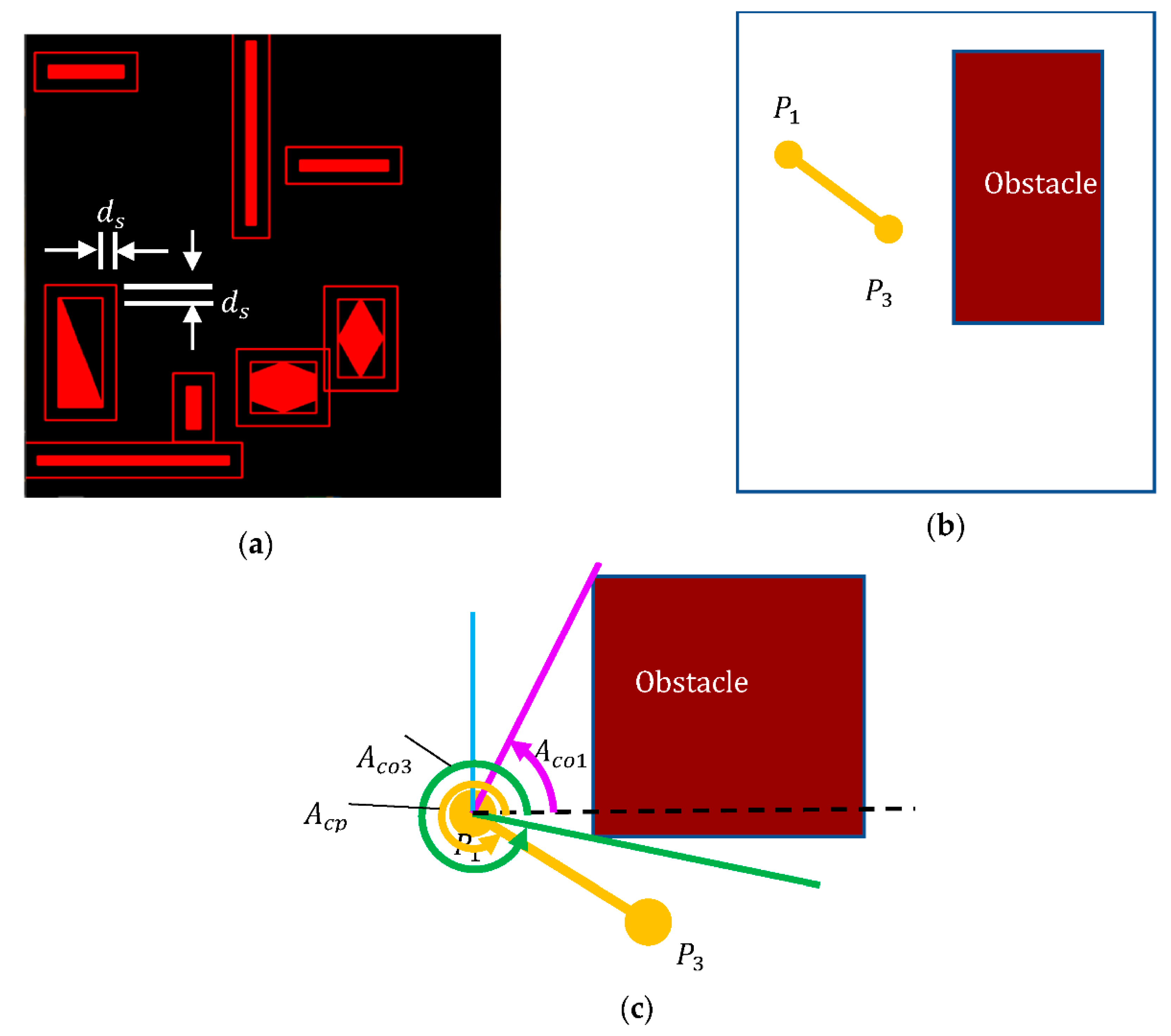
3. Improved RRT Algorithm with Pruning
4. Improved RRT Algorithm with Smoothing and Optimization
5. Experimental Verification by Tracking Control
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- World Health Organization. Global Status Report on Road Safety 2018; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Rahim, A.; Kong, X.; ** Systems. Sensors 2019, 19, 1665. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, C.; Sun, Q.Y.; Li, Z.; Zhang, H.J. Human-Like Lane Change Decision Model for Autonomous Vehicles that Considers the Risk Perception of Drivers in Mixed Traffic. Sensors 2020, 20, 2259. [Google Scholar] [CrossRef] [Green Version]
- Lin, F.; Wang, K.Z.; Zhao, Y.Q.; Wang, S.B. Integrated Avoid Collision Control of Autonomous Vehicle Based on Trajectory Re-Planning and V2V Information Interaction. Sensors 2020, 20, 1079. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.J.; **ao, W.; Zhang, Z.; Meng, D.J. Surrounding Vehicles Motion Prediction for Risk Assessment and Motion Planning of Autonomous Vehicle in Highway Scenarios. IEEE Access 2020, 8, 209356–209376. [Google Scholar] [CrossRef]
- Li, G.F.; Yang, Y.F.; Zhang, T.R.; Qu, X.D.; Cao, D.P.; Cheng, B.; Li, K.Q. Risk Assessment Based Collision Avoidance Decision-Making for Autonomous Vehicles in Multi-Scenarios. Transp. Res. Part C Emerg. Technol. 2021, 122, 102820. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Repetitions | Success Rate (%) | Average Calculation Time (ms) |
|---|---|---|
| 1 | 56 | 91 |
| 5 | 74 | 420 |
| 10 | 96 | 900 |
| RRT Algorithm | With Pruning | With Pruning and Optimization |
|---|---|---|
| 1043 | 776 | 583 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.M.; Lin, Y.A. Development of an Improved Rapidly Exploring Random Trees Algorithm for Static Obstacle Avoidance in Autonomous Vehicles. Sensors 2021, 21, 2244. https://doi.org/10.3390/s21062244
Yang SM, Lin YA. Development of an Improved Rapidly Exploring Random Trees Algorithm for Static Obstacle Avoidance in Autonomous Vehicles. Sensors. 2021; 21(6):2244. https://doi.org/10.3390/s21062244
Chicago/Turabian StyleYang, S. M., and Y. A. Lin. 2021. "Development of an Improved Rapidly Exploring Random Trees Algorithm for Static Obstacle Avoidance in Autonomous Vehicles" Sensors 21, no. 6: 2244. https://doi.org/10.3390/s21062244