
Unsupervised Noise Reductions for Gravitational Reference Sensors or Accelerometers Based on the Noise2Noise Method


Abstract
:1. Introduction
- We applied the N2N method for the first time to suppress noise in inertial sensor data.
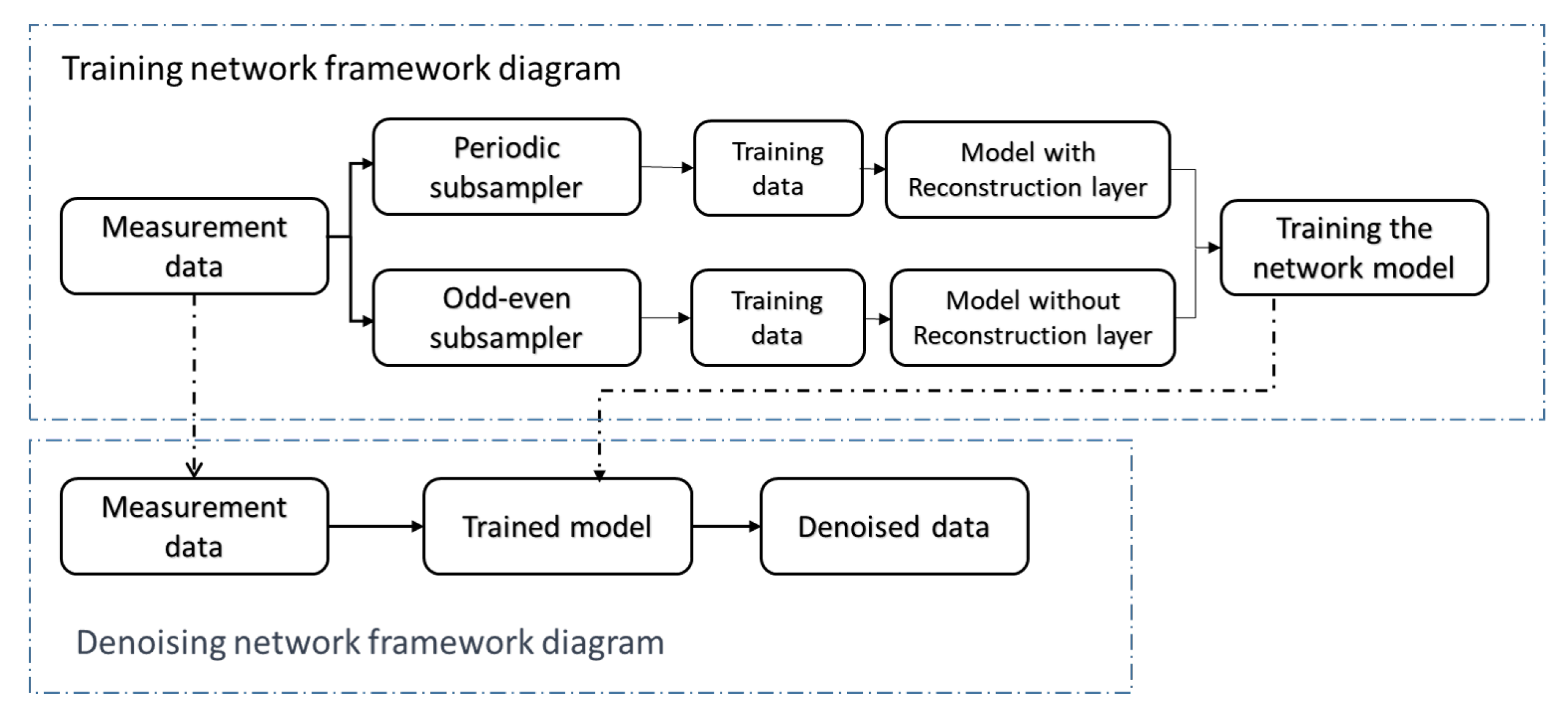
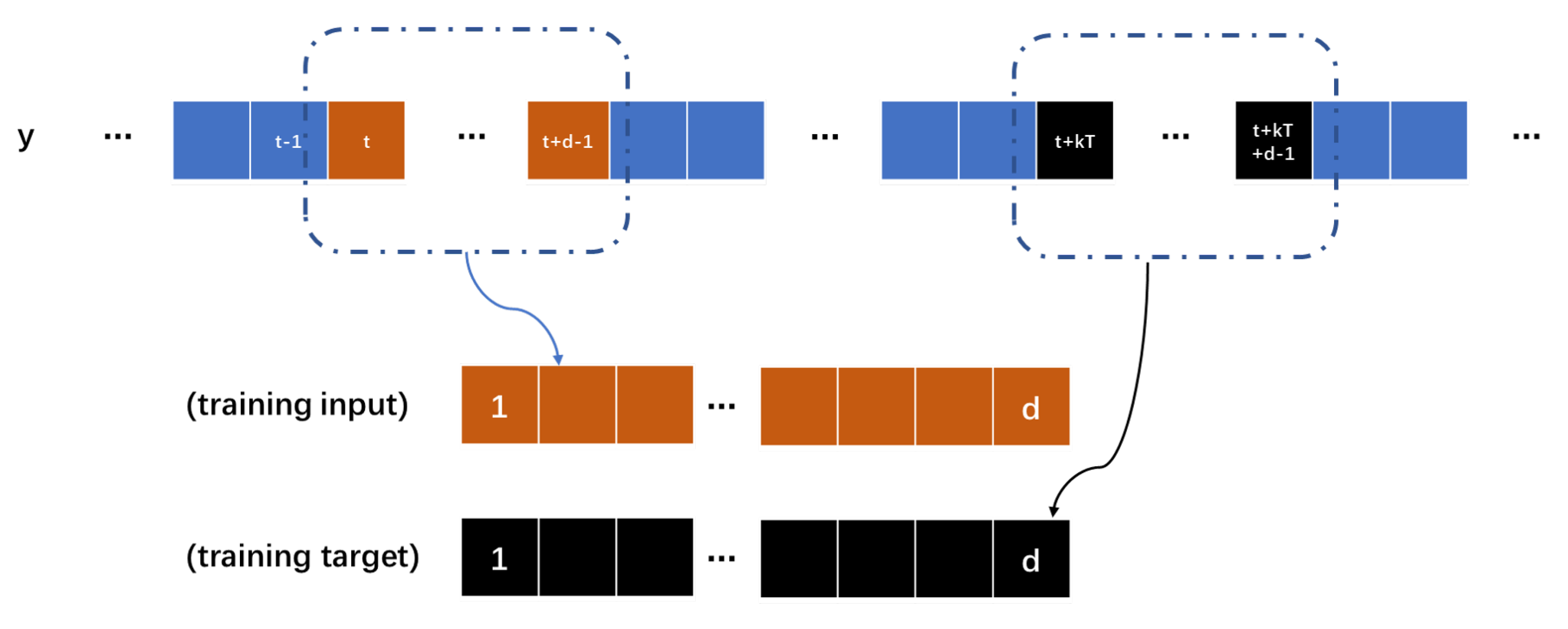
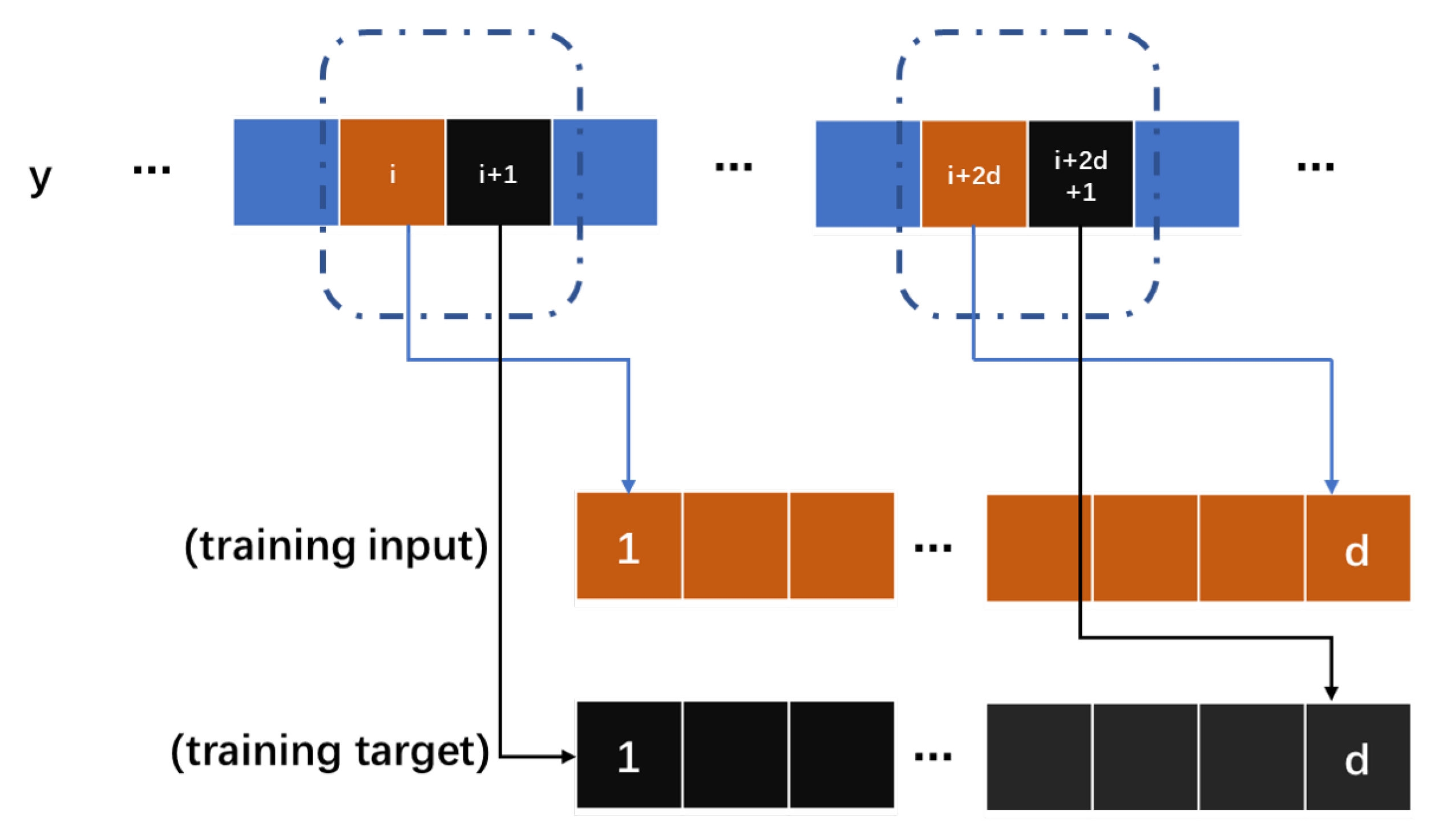
- The signal was divided into periodic and general components, and we proposed the use of a periodic sub-sampler and an odd–even sub-sampler. For the periodic component, we proposed the addition of a reconstruction layer to the model.
- We applied the N2N method to the Taiji-1 calibration task and GRACE-FO Level-1A data, effectively suppressing noise.
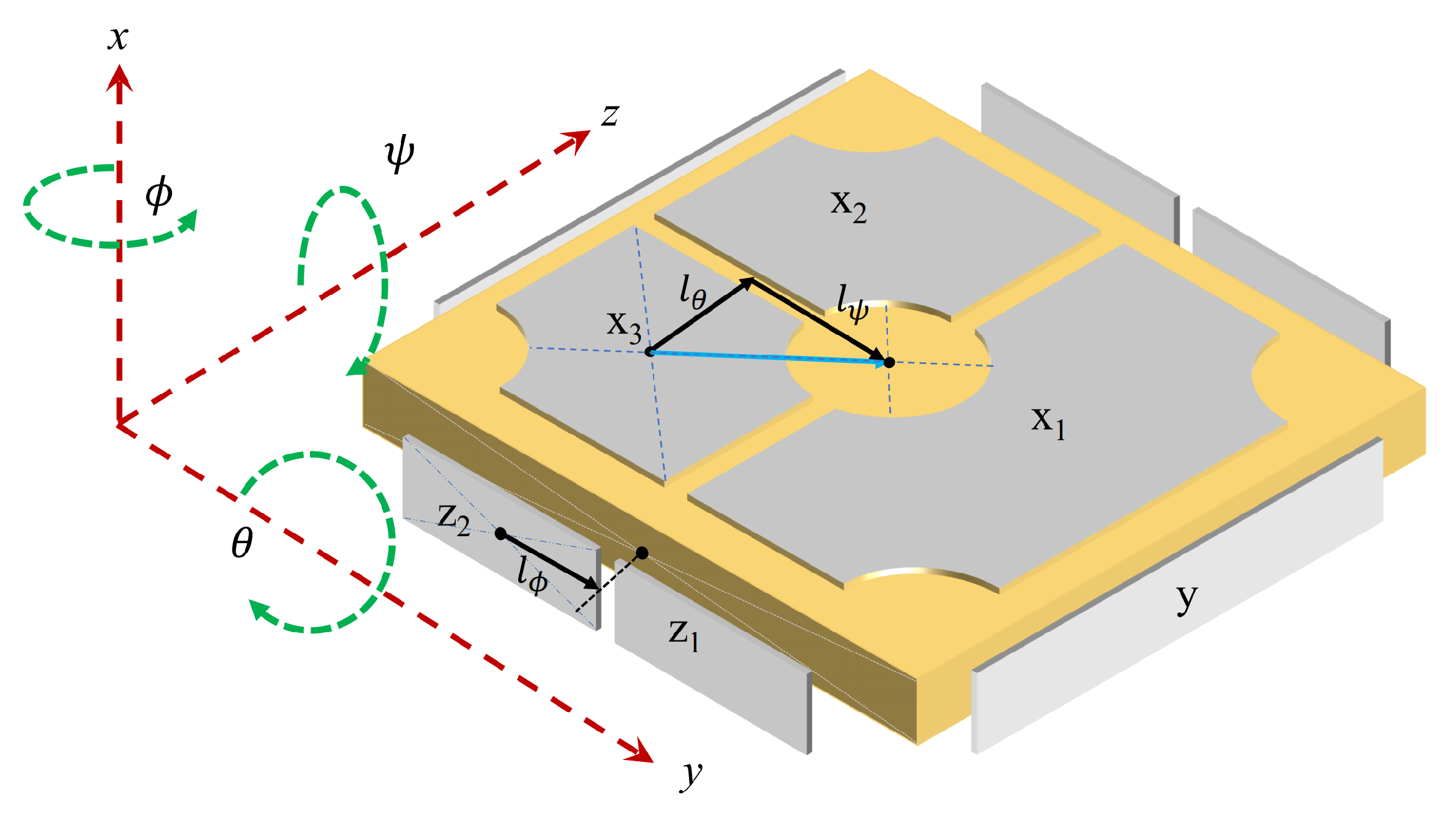
2. Electrostatic Levitation Inertial Sensors
2.1. Overview
2.2. The Working Principle of Inertial Sensors
2.3. Noise Analysis of Accelerometers
3. Methodology
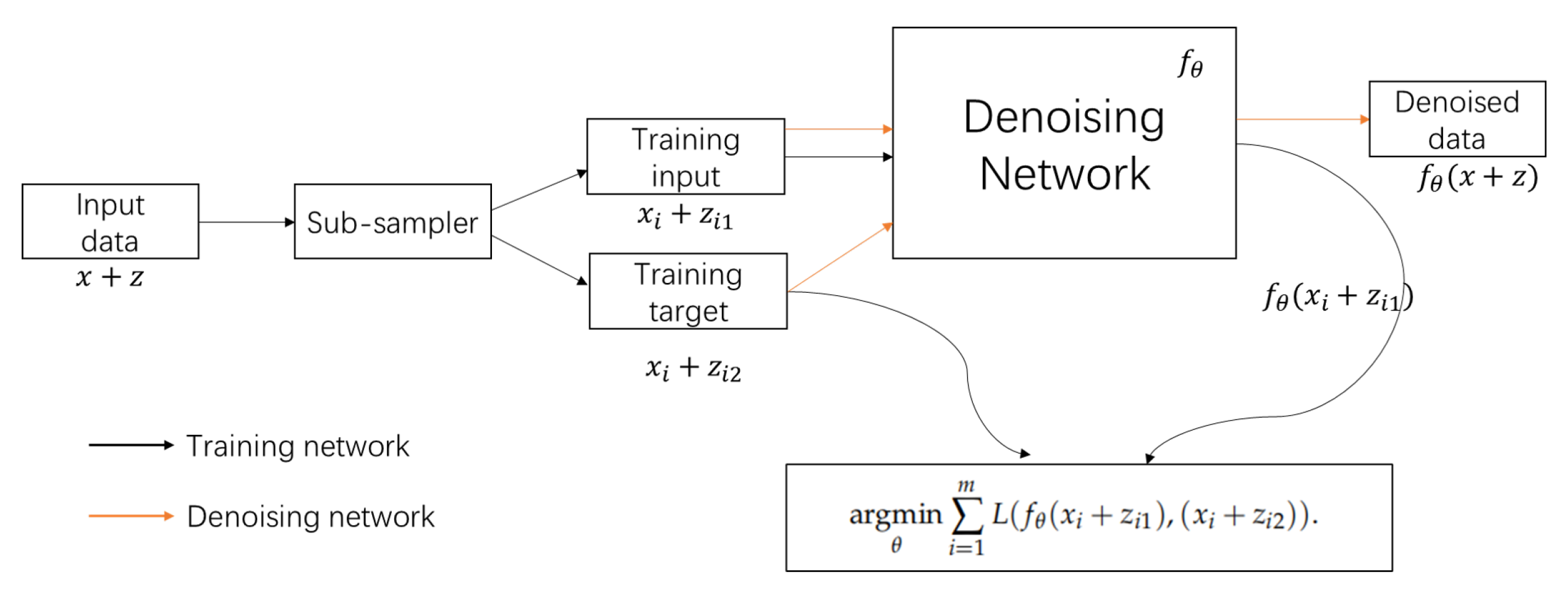
3.1. Noise2Noise Revisit
- Condition 1: The noise of measurement in the input is independent from the noise in the target which is used to train the network;
- Condition 2: The expectation of noise added to the signal is zero.
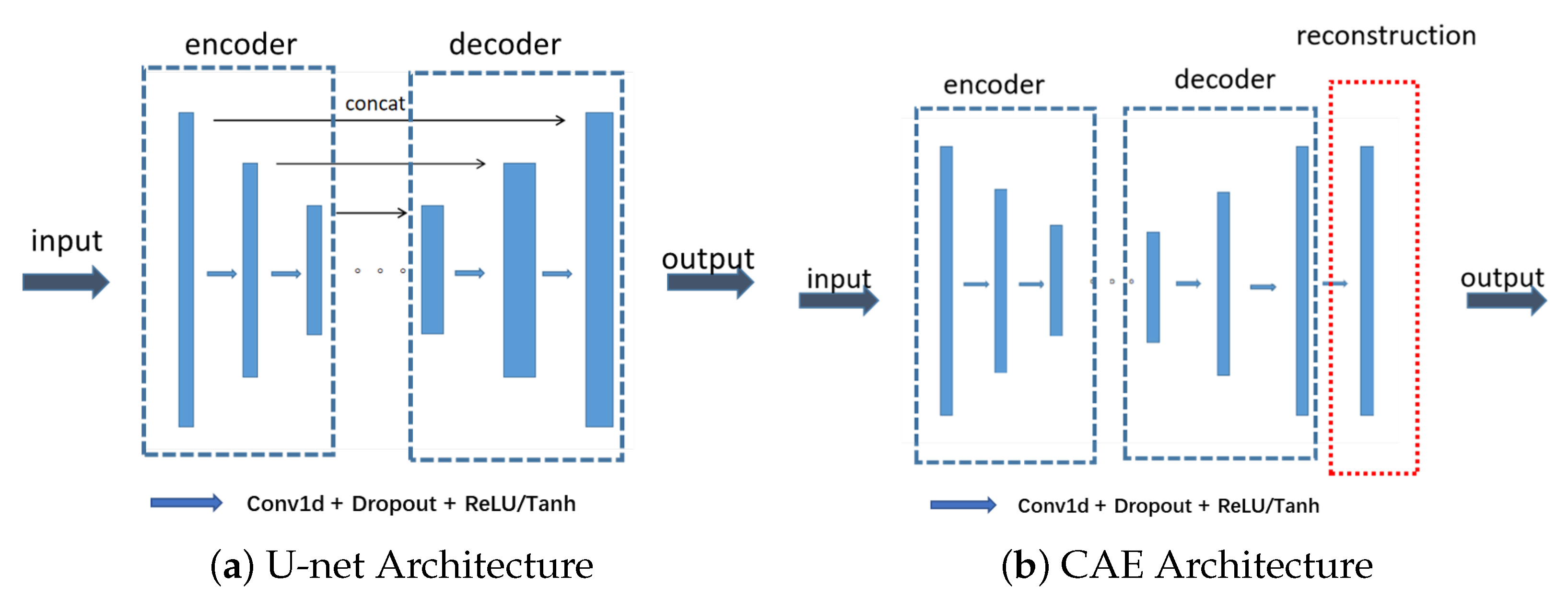
3.2. Network Model Architecture
4. Experiments and Results
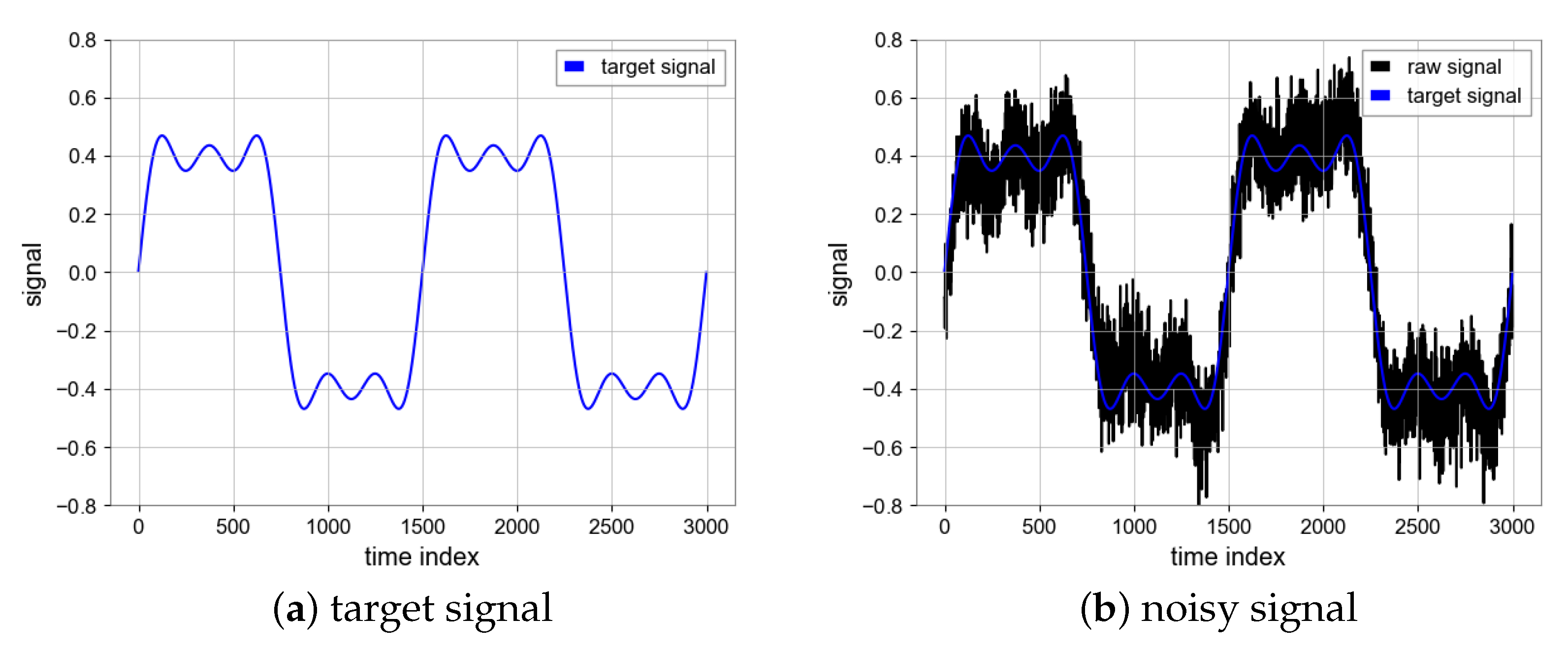
4.1. Simulation Data Experiments
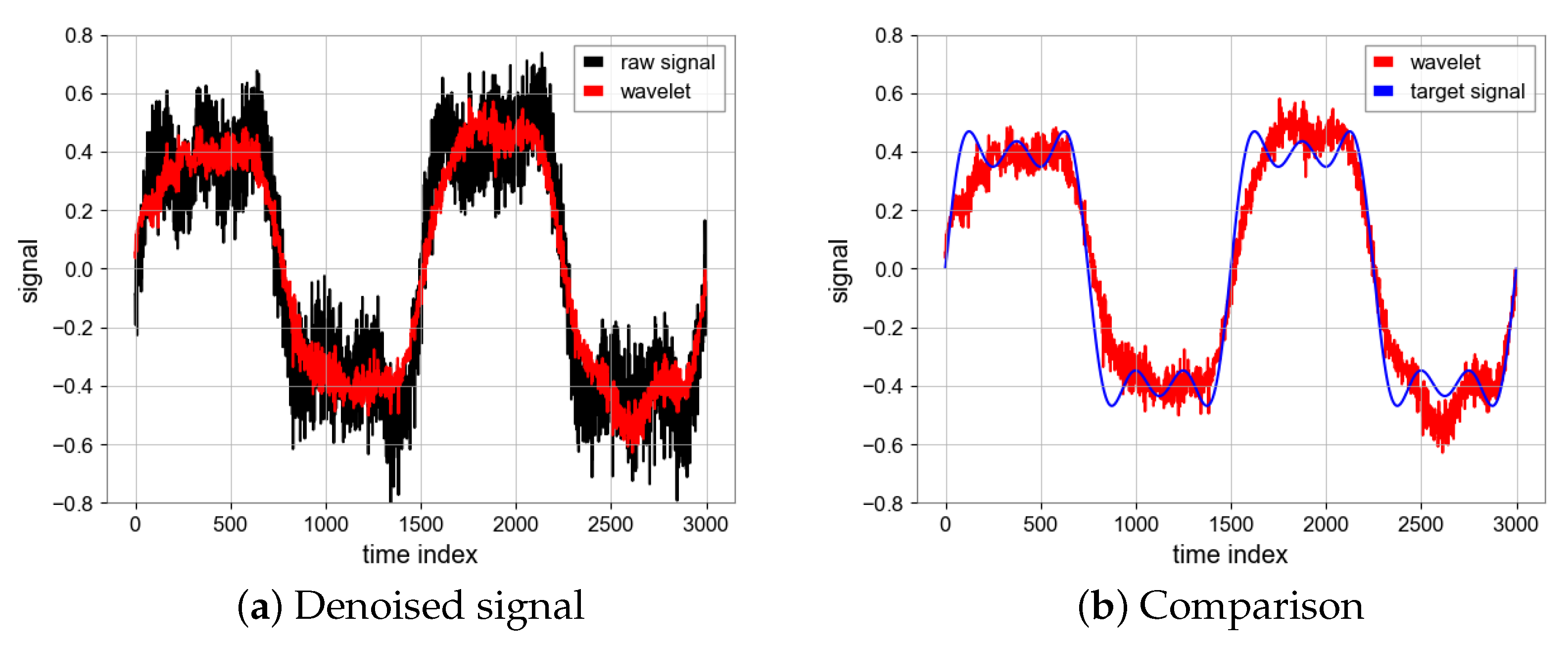
4.1.1. Wavelet Denoising Filter
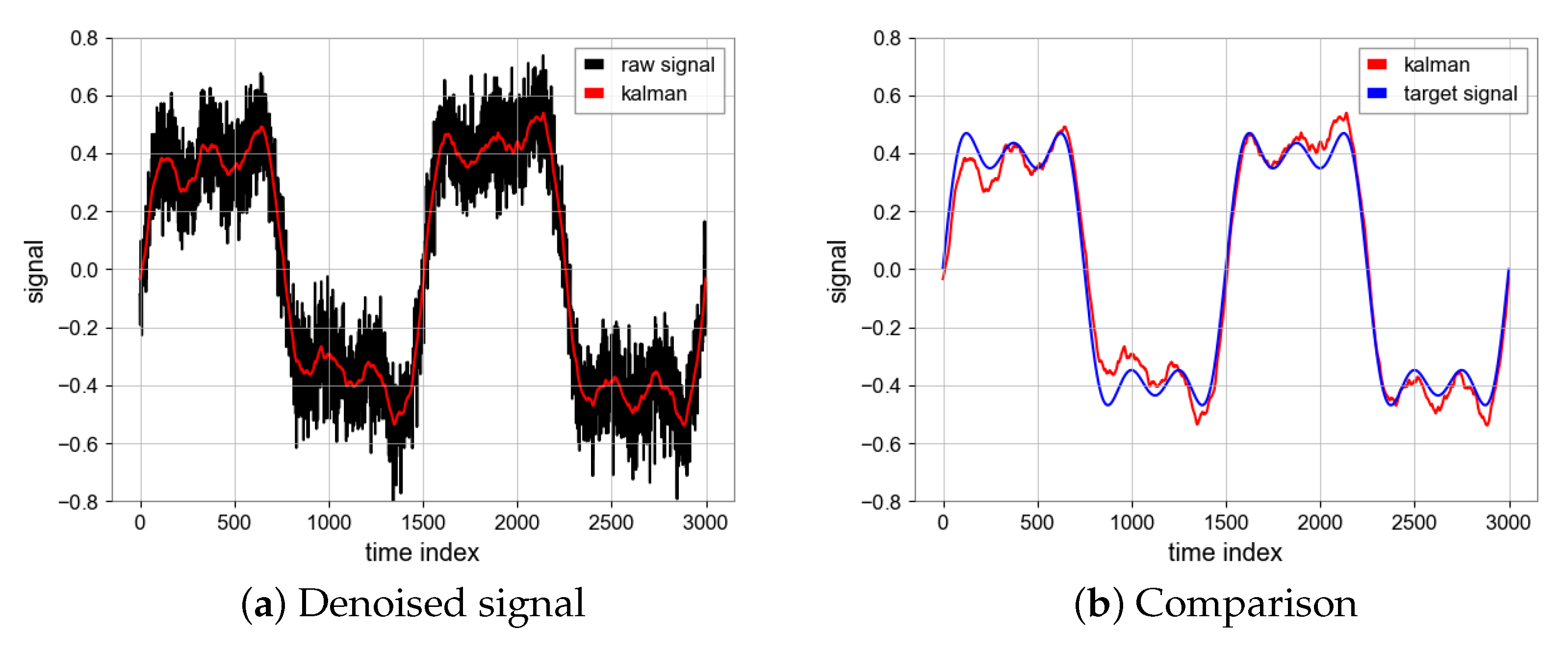
4.1.2. Kalman Filter
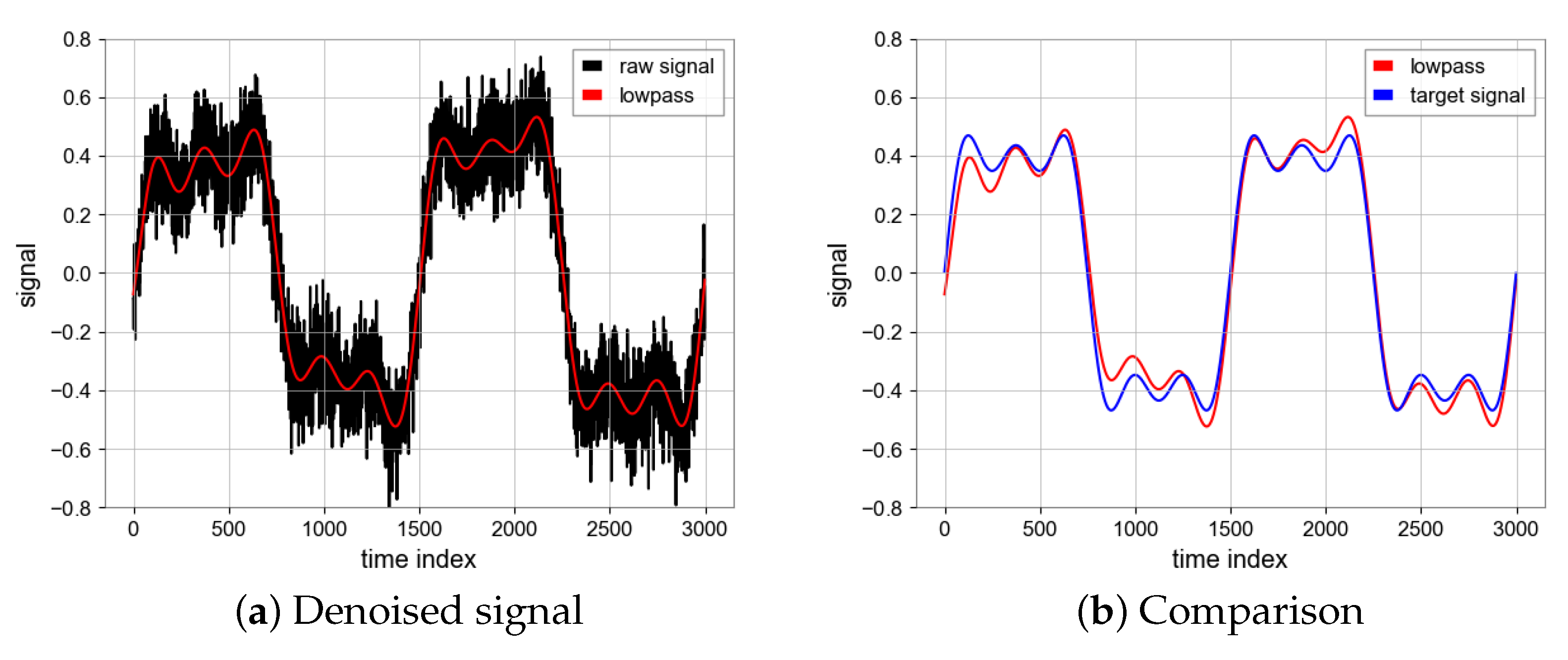
4.1.3. Butterworth Filter
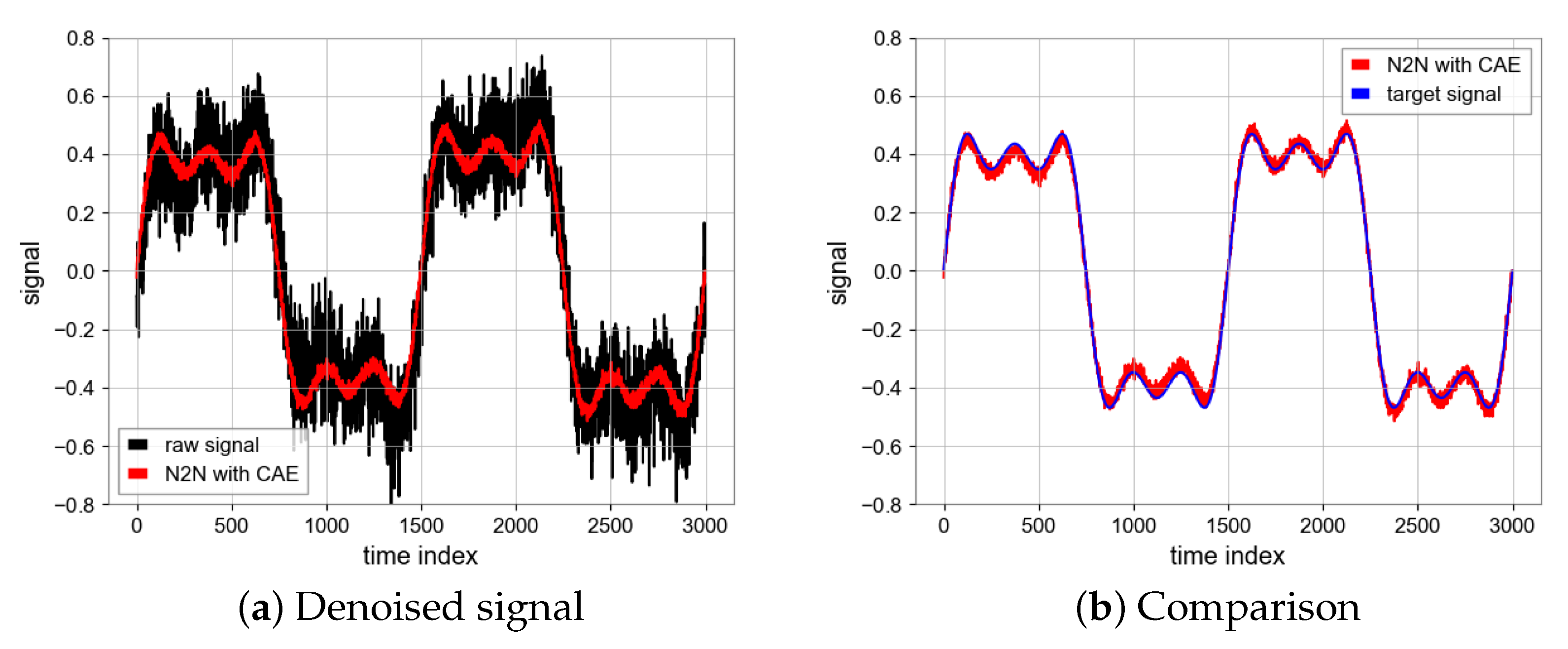
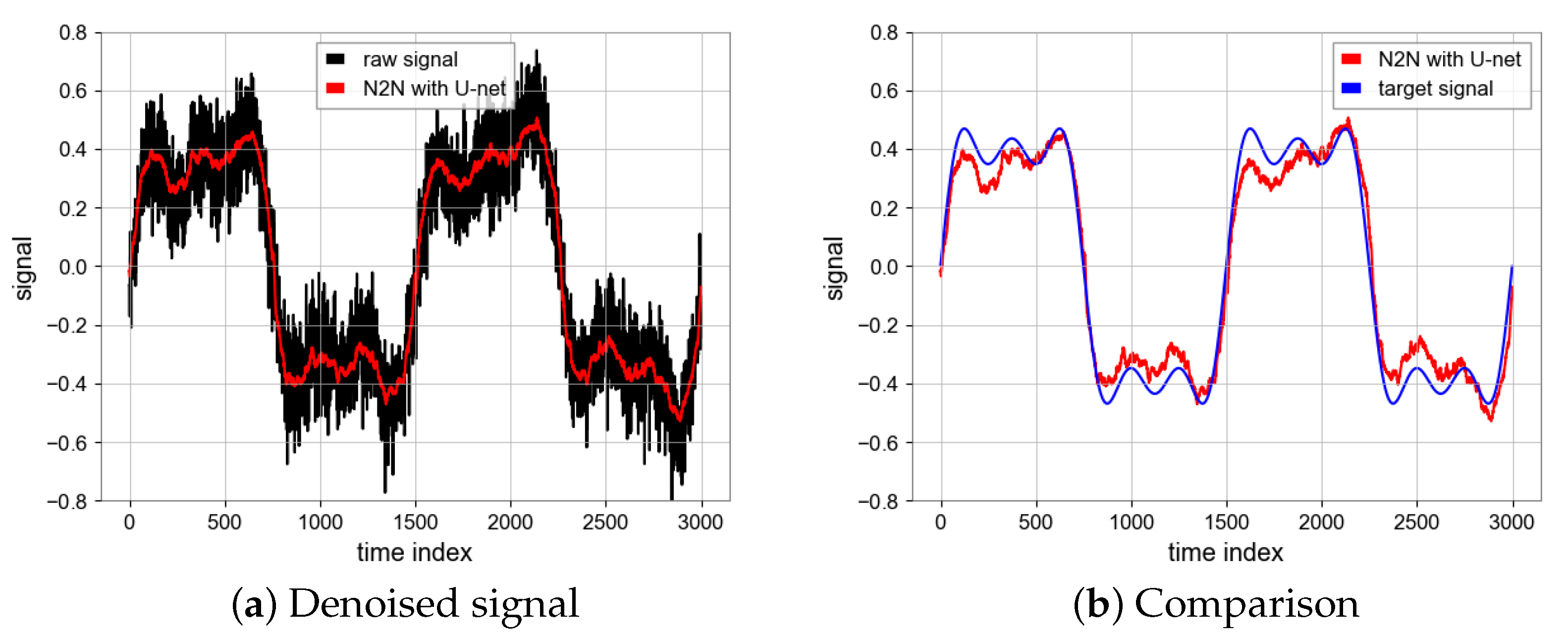
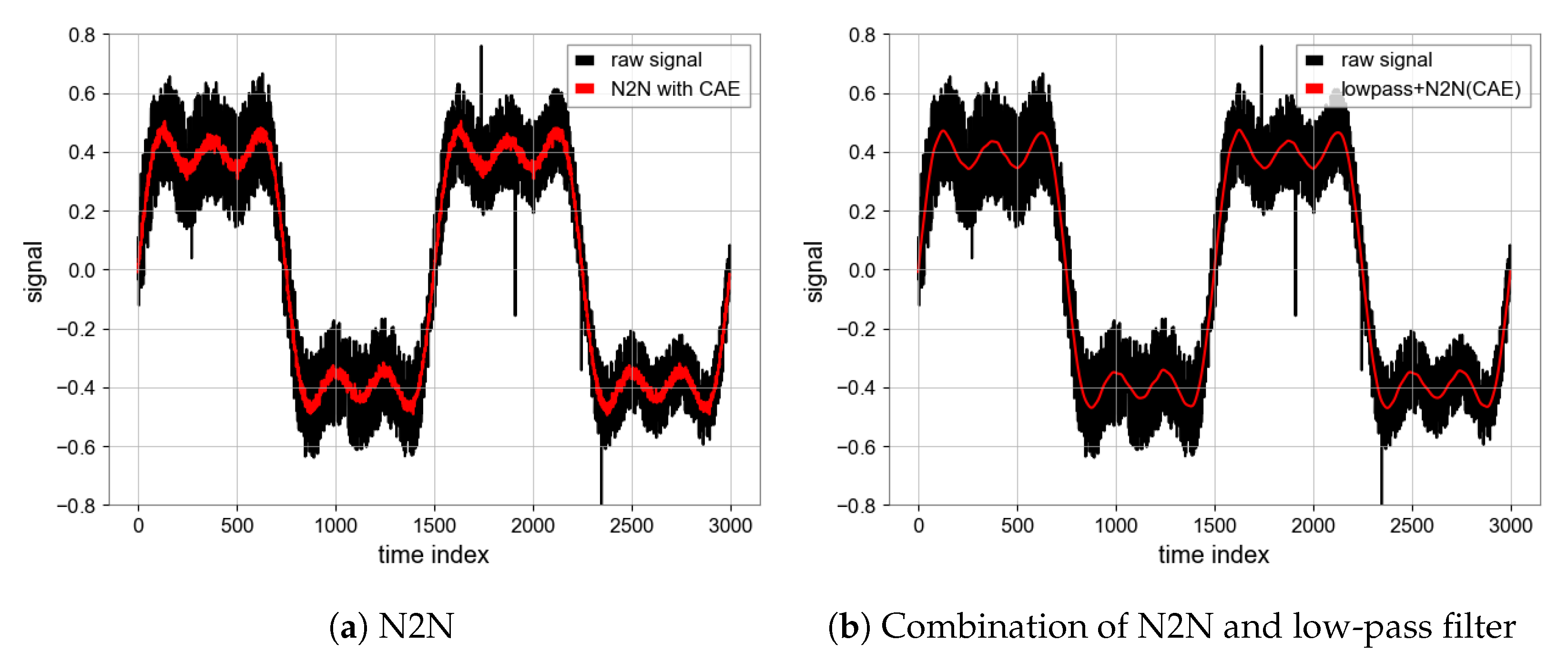
4.1.4. N2N Algorithm
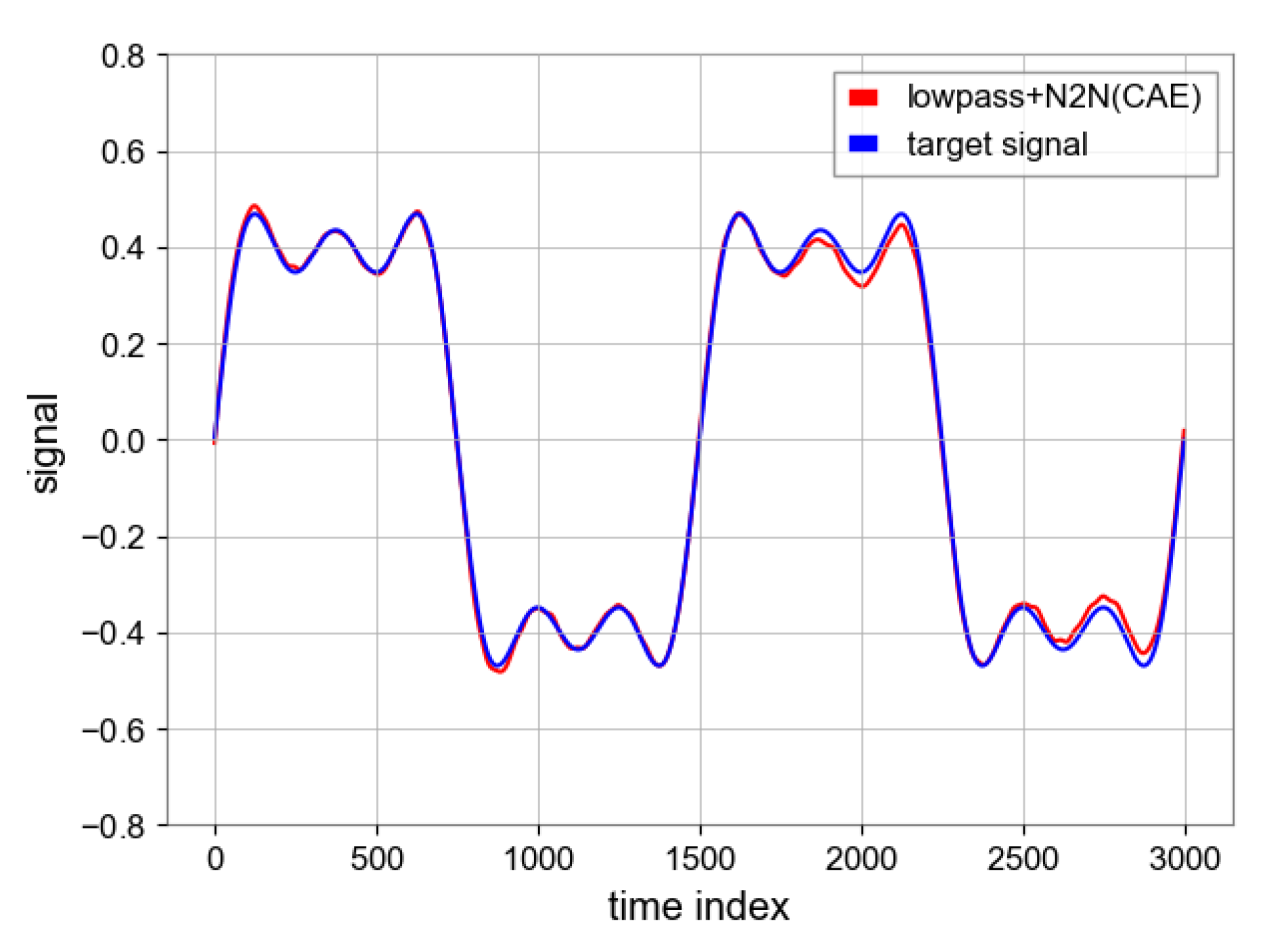
4.1.5. Comparison between Filters and N2N
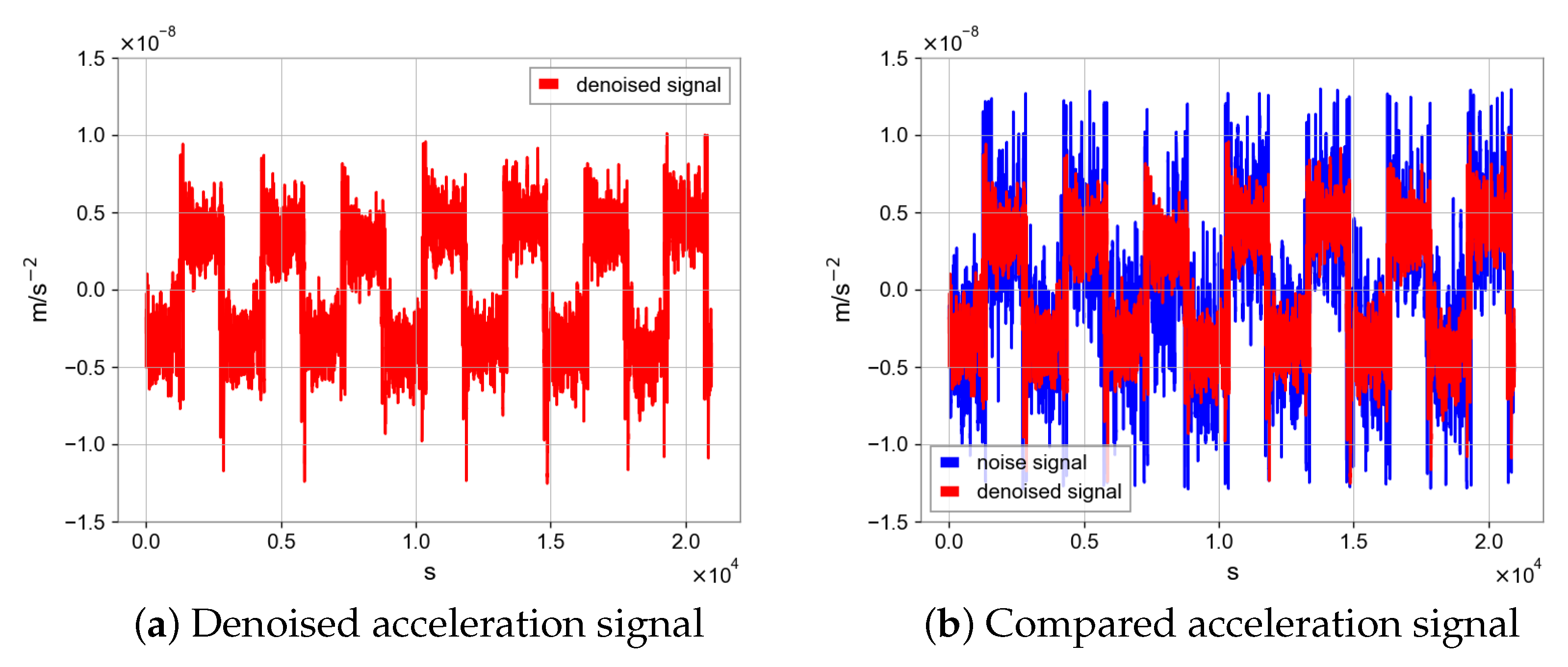
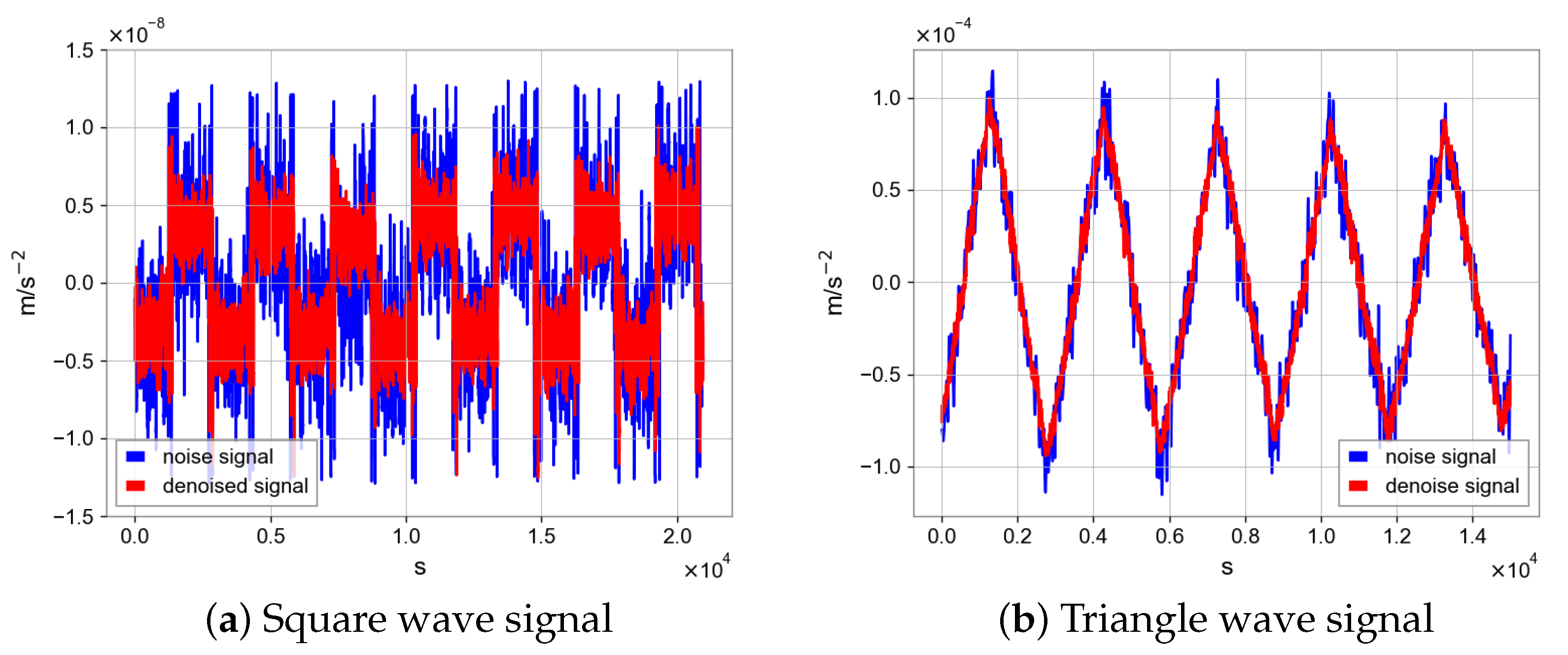
4.2. Real Data Experiments
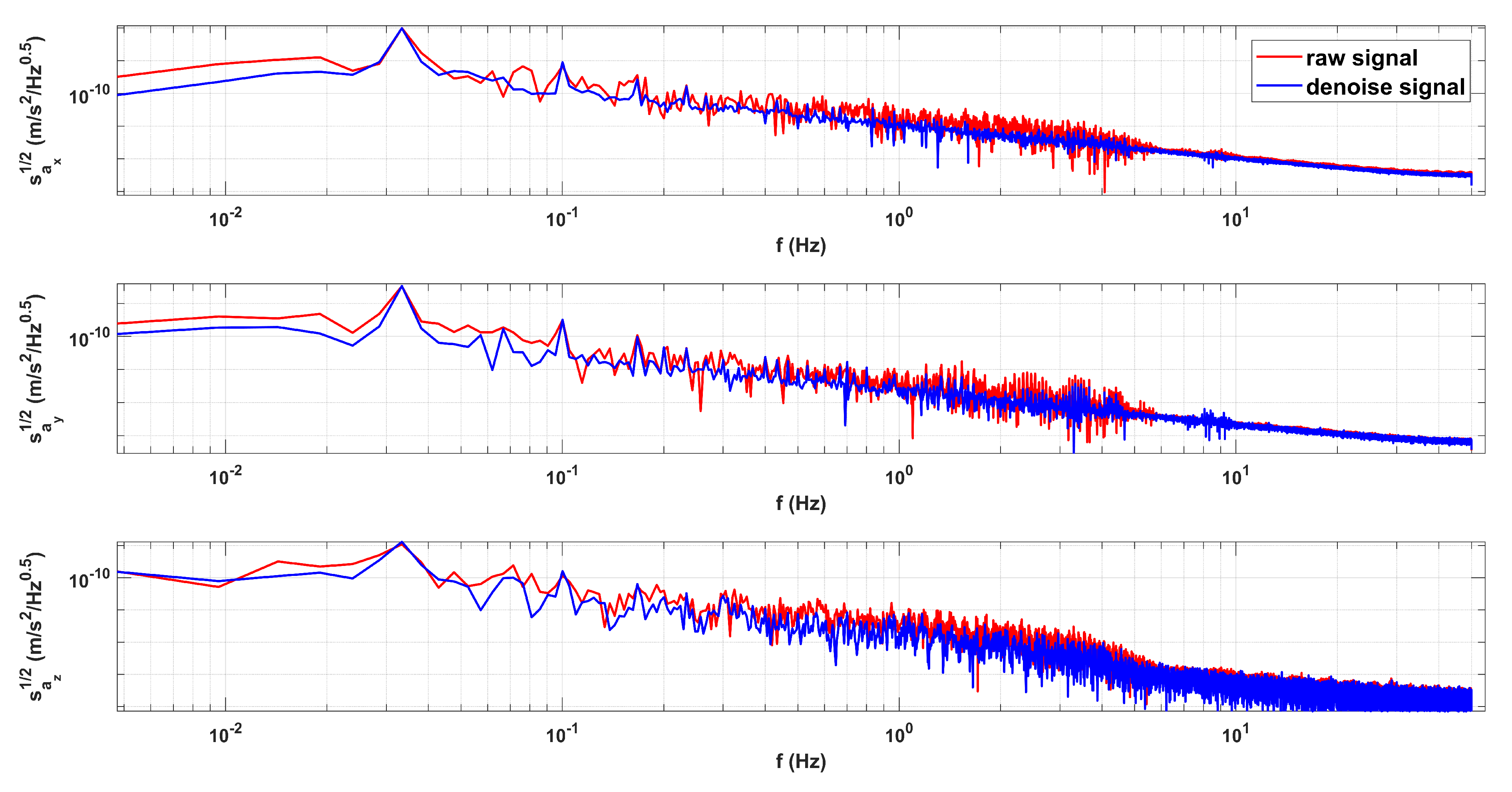
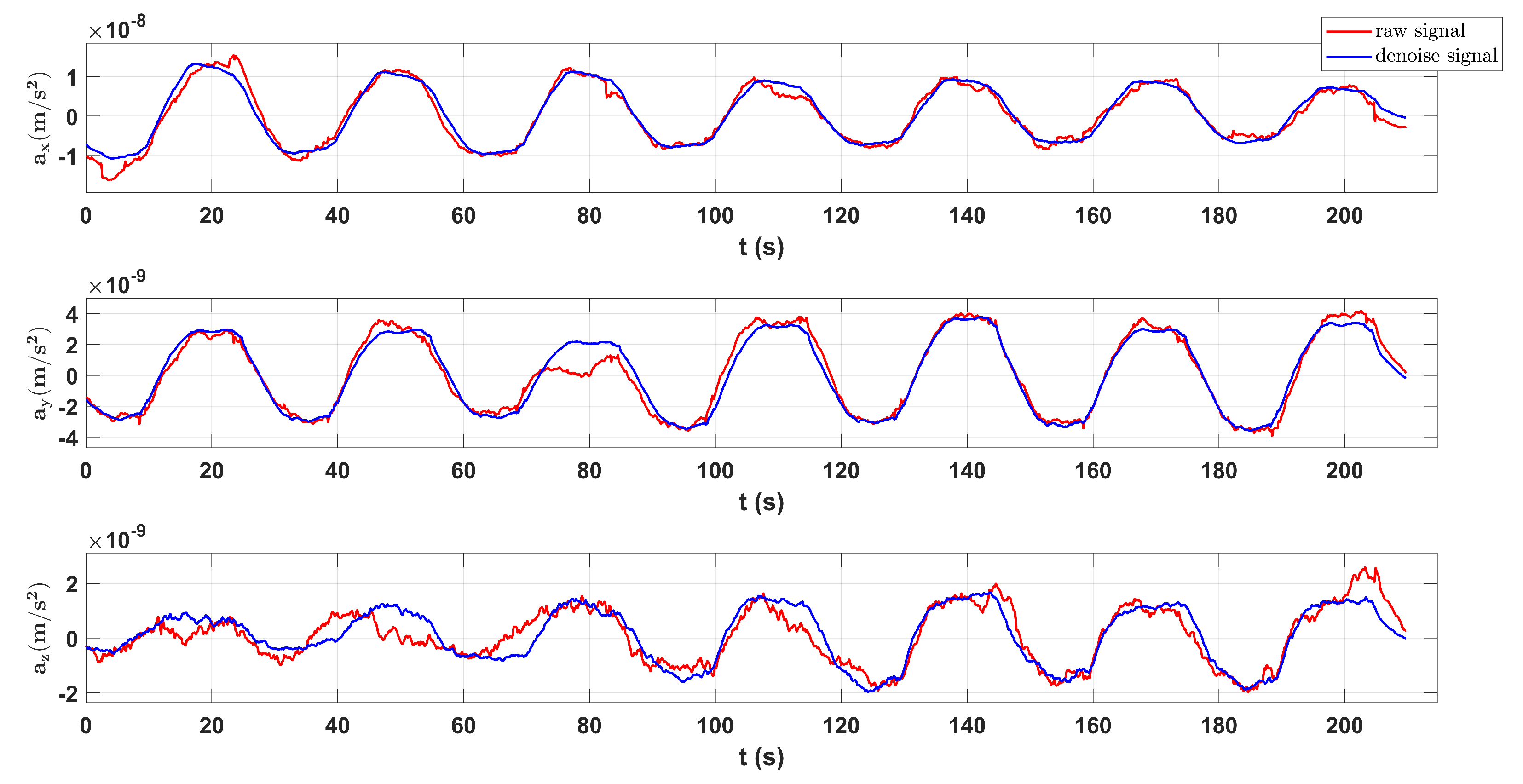
4.2.1. Taiji-1 Data
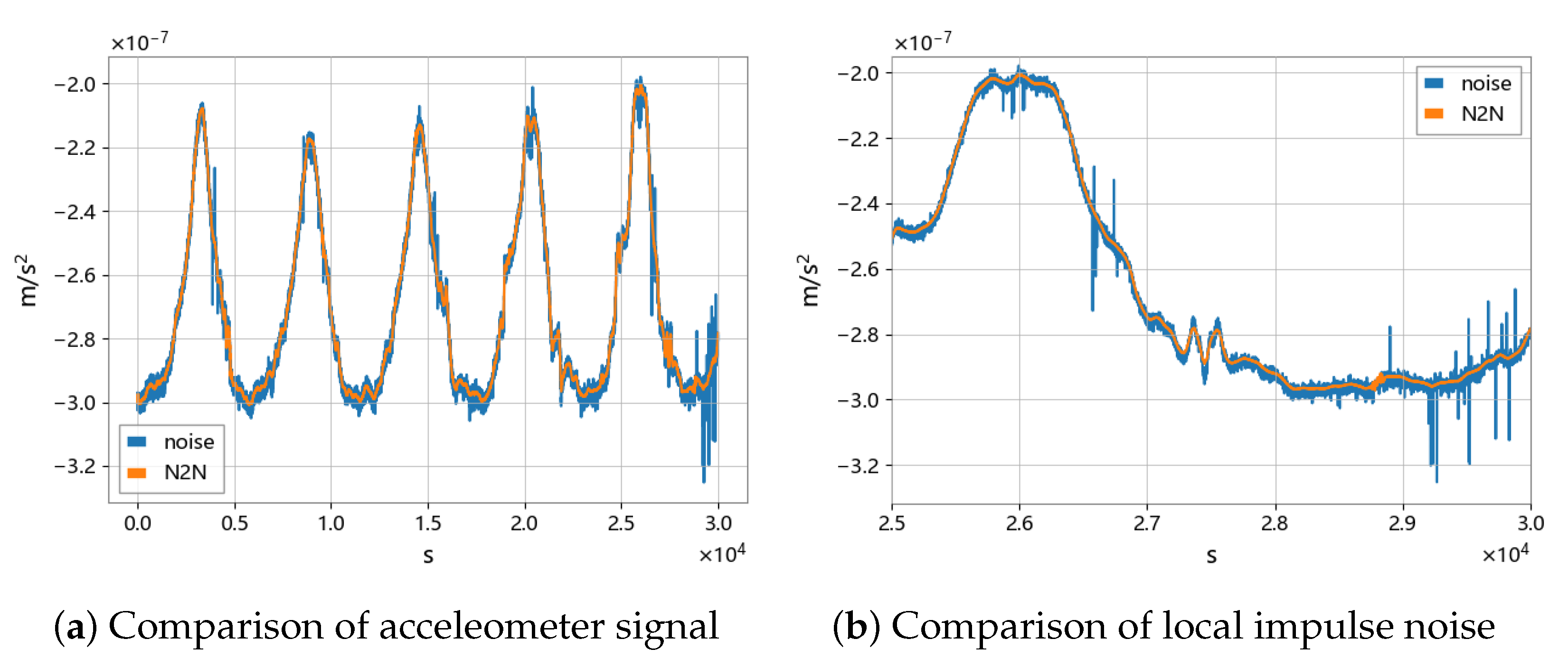
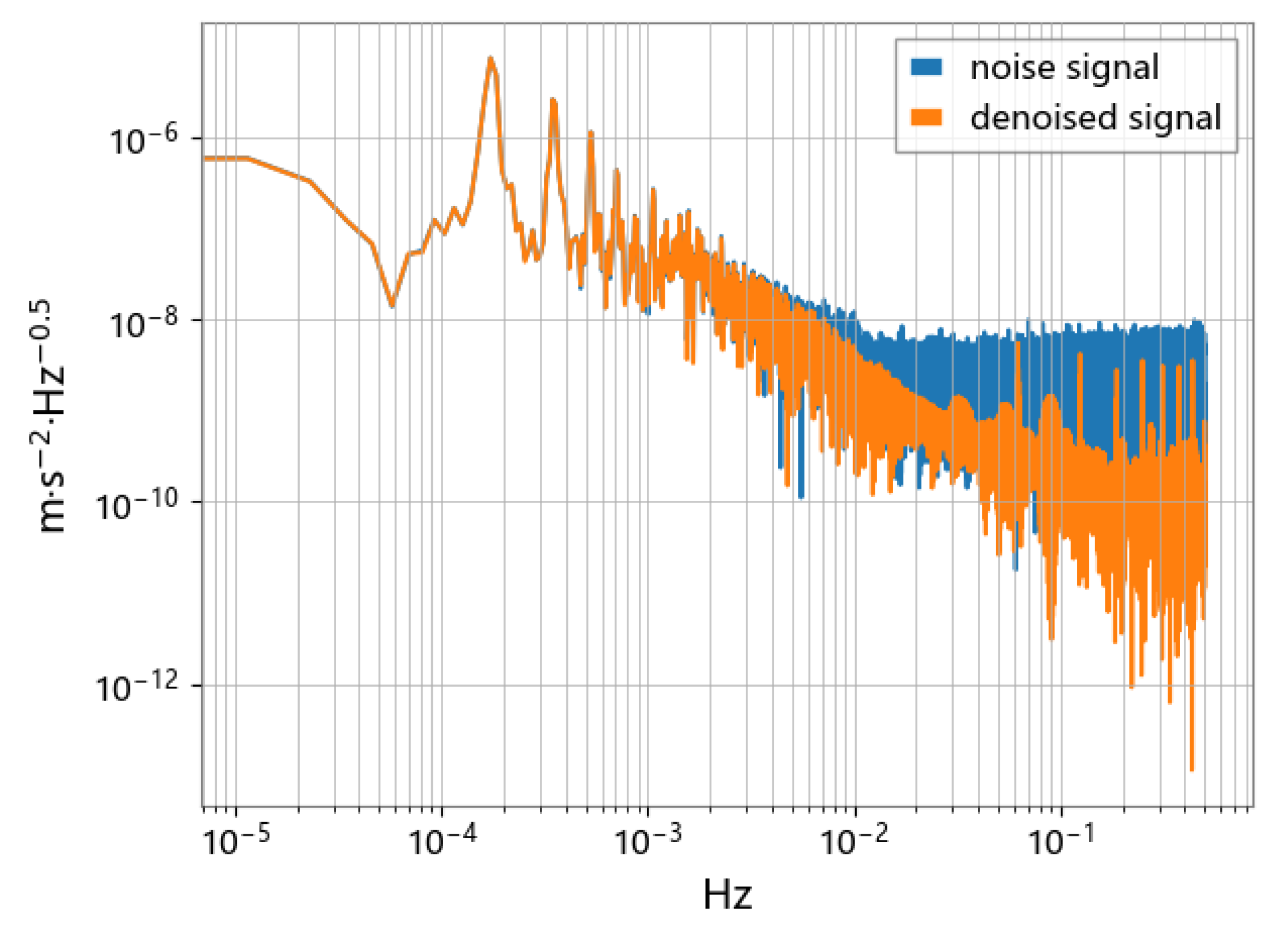
4.2.2. GRACE-FO Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tapley, B.D.; Bettadpur, S.; Ries, J.C.; Thompson, P.F.; Watkins, M.M. GRACE measurements of mass variability in the Earth system. Science 2004, 305, 503–505. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bandikova, T.; McCullough, C.; Kruizinga, G.L.; Save, H.; Christophe, B. GRACE accelerometer data transplant. Adv. Space Res. 2019, 64, 623–644. [Google Scholar] [CrossRef] [Green Version]
- Drinkwater, M.; Floberghagen, R.; Haagmans, R.; Muzi, D.; Popescu, A. GOCE: ESA’s first Earth Explorer Core mission. In Proceedings of the Earth Gravity Field from Space—From Sensors to Earth Sciences: Proceedings of an ISSI Workshop, Bern, Switzerland, 11–15 March 2002; Springer: Berlin/Heidelberg, Germany, 2003; pp. 419–432. [Google Scholar]
- Armano, M.; Audley, H.; Auger, G.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Bursi, A.; Caleno, M.; et al. The LISA pathfinder mission. J. Phys. Conf. Ser. 2015, 610, 012005. [Google Scholar]
- Luo, Z.; Guo, Z.; **, G.; Wu, Y.; Hu, W. A brief analysis to Taiji: Science and technology. Results Phys. 2020, 16, 102918. [Google Scholar] [CrossRef]
- Luo, J.; Chen, L.S.; Duan, H.Z.; Gong, Y.G.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M.; et al. TianQin: A space-borne gravitational wave detector. Class. Quantum Gravity 2016, 33, 035010. [Google Scholar] [CrossRef] [Green Version]
- Morvan, M.; Nikolaou, N.; Yip, K.H.; Waldmann, I. Don’t Pay Attention to the Noise: Learning Self-supervised Representations of Light Curves with a Denoising Time Series Transformer. ar** as nonparametric variational inference. In Proceedings of the 19th International Conference on Artificial Intelligence and Statistics, Cadiz, Spain, 9–11 May 2016; pp. 1070–1077. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name/Threshold | 0.1 | 0.3 | 0.5 | 0.7 | 0.9 | 1.0 | 1.5 |
|---|---|---|---|---|---|---|---|
| Sym8 | 0.013 | 0.034 | 0.071 | 0.106 | 0.133 | 0.139 | 0.140 |
| Coif4 | 0.013 | 0.034 | 0.071 | 0.107 | 0.134 | 0.140 | 0.140 |
| Db3 | 0.013 | 0.034 | 0.067 | 0.103 | 0.131 | 0.144 | 0.144 |
| Db36 | 0.010 | 0.009 | 0.013 | 0.016 | 0.018 | 0.018 | 0.018 |
| (Q, R) | (10, 1000) | (1, 100) | (1, 10) | (1, 1) | (10, 1) |
|---|---|---|---|---|---|
| MSE | 0.0052 | 0.0058 | 0.0077 | 0.0123 | 0.0123 |
| Cut-Off Frequency | 0.0005 | 0.001 | 0.0025 | 0.005 | 0.01 | 0.015 | 0.02 | 0.025 | 0.05 | 0.1 |
| MSE | 0.1336 | 0.0223 | 0.0097 | 0.0052 | 0.0052 | 0.0053 | 0.0054 | 0.0055 | 0.006 | 0.0069 |
| Filters | Wavelet Transform | Kalman Filter | Butterworth Filter | N2N | N2N+Lowpass Filter |
|---|---|---|---|---|---|
| SNR | 12.64 | 16.54 | 16.58 | 23.56 | 25.28 |
| MSE | 0.0078 | 0.0033 | 0.0033 | 0.0006 | 0.0004 |
| COM Offset | Calibrated Value with N2N (mm) | Calibrated Value without N2N (mm) |
|---|---|---|
| x-axis | −0.0793 | −0.1400 |
| y-axis | 0.3707 | 0.6270 |
| z-axis | −0.8343 | −0.8520 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Zhang, H.; Xu, P.; Luo, Z. Unsupervised Noise Reductions for Gravitational Reference Sensors or Accelerometers Based on the Noise2Noise Method. Sensors 2023, 23, 6030. https://doi.org/10.3390/s23136030
Yang Z, Zhang H, Xu P, Luo Z. Unsupervised Noise Reductions for Gravitational Reference Sensors or Accelerometers Based on the Noise2Noise Method. Sensors. 2023; 23(13):6030. https://doi.org/10.3390/s23136030
Chicago/Turabian StyleYang, Zhilan, Haoyue Zhang, Peng Xu, and Ziren Luo. 2023. "Unsupervised Noise Reductions for Gravitational Reference Sensors or Accelerometers Based on the Noise2Noise Method" Sensors 23, no. 13: 6030. https://doi.org/10.3390/s23136030