

Tactile-Sensing Technologies: Trends, Challenges and Outlook in Agri-Food Manipulation

Abstract
:1. Introduction
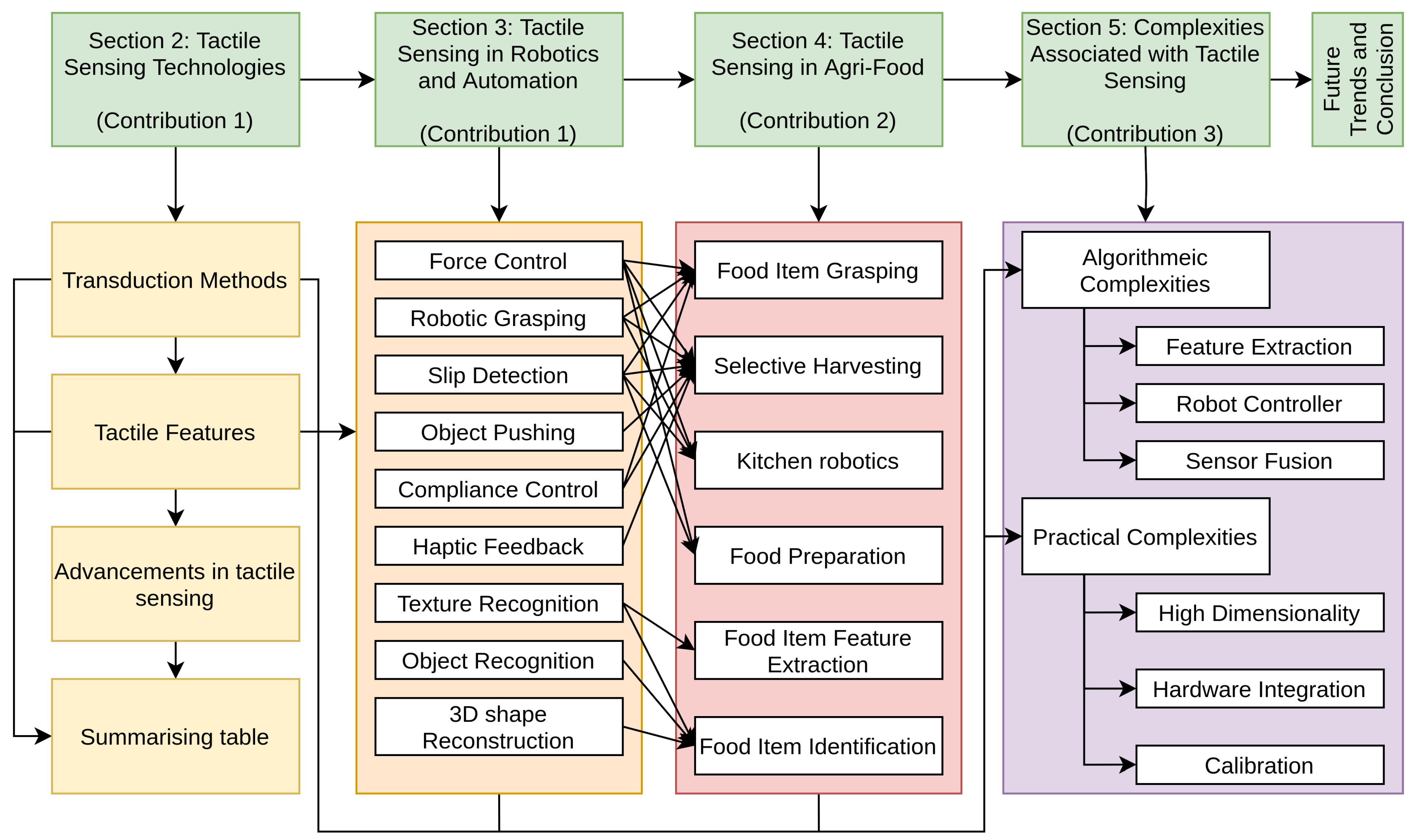
- Context of tactile sensation research: We provide a comprehensive overview of tactile sensation technology in Section 2 and core algorithms in Section 3 that are used in robotics and automation research. This discussion offers a solid foundation and understanding of the current state-of-the-art technologies in the field.
- Tactile sensation in agri-food: Our review paper focuses on the application of tactile sensation research specifically in the agri-food domain, which has not been covered in other tactile sensation review papers. In Section 4, we present a concise and comprehensive examination of the current research on tactile sensation applied to various aspects of agri-food, highlighting its significance and potential impact.
- Systematic Review of Shortcomings and Challenges: We contribute a systematic review of the shortcomings and use case challenges associated with the developed tactile sensor technologies for agri-food use cases. This critical assessment, presented in Section 5, addresses an aspect that has been largely disregarded in other review papers on tactile sensors [43,44,45,46,47,48,49].
2. Tactile-Sensing Technologies
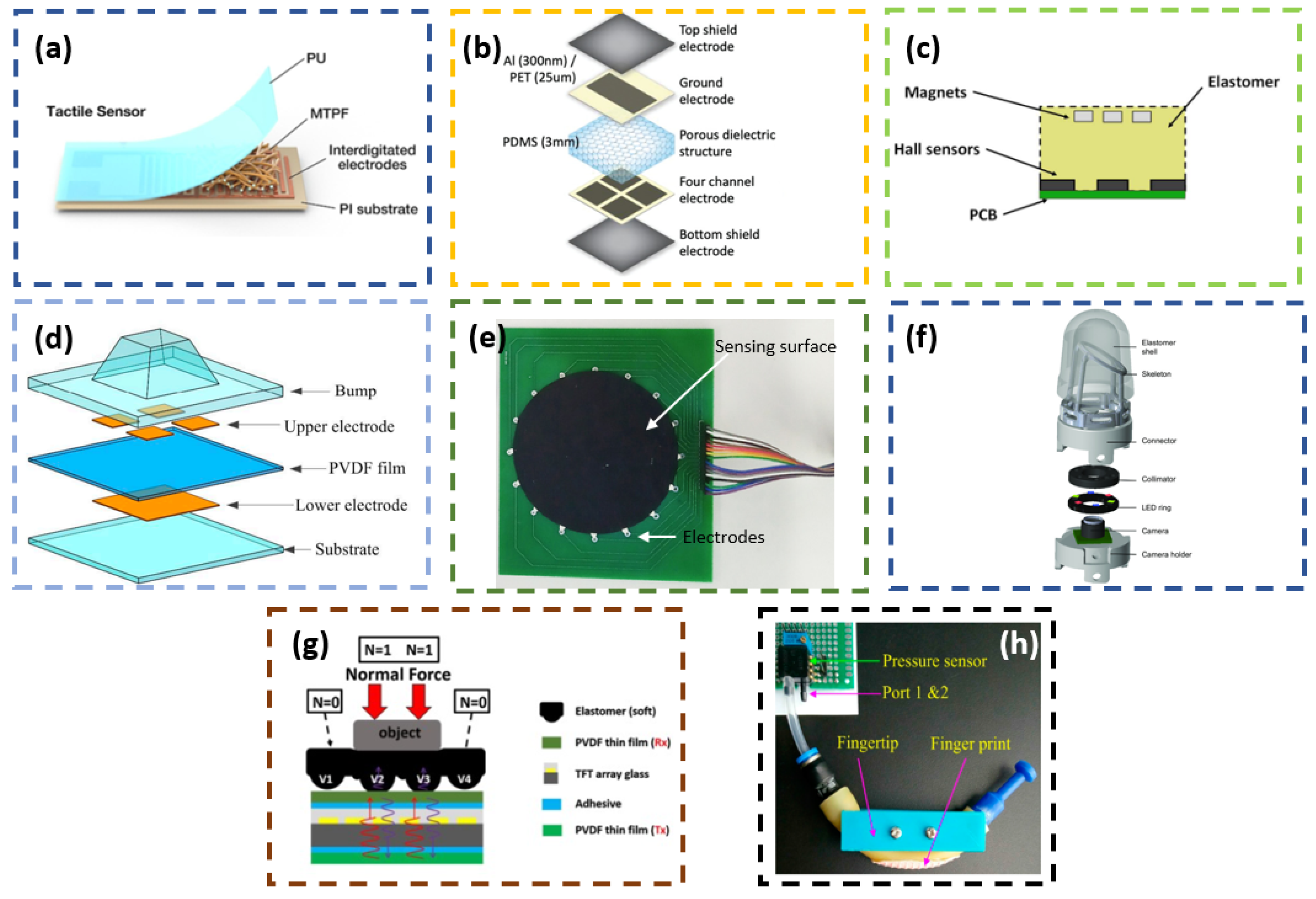
2.1. Transduction Methods
2.1.1. Resistive and Piezoresistive
2.1.2. Capacitive
2.1.3. Magnetic and Hall Effect
2.1.4. Piezoelectric
2.1.5. Electrical Impedance Tomography
2.1.6. Camera/Vision Based
2.1.7. Optic Fiber Based
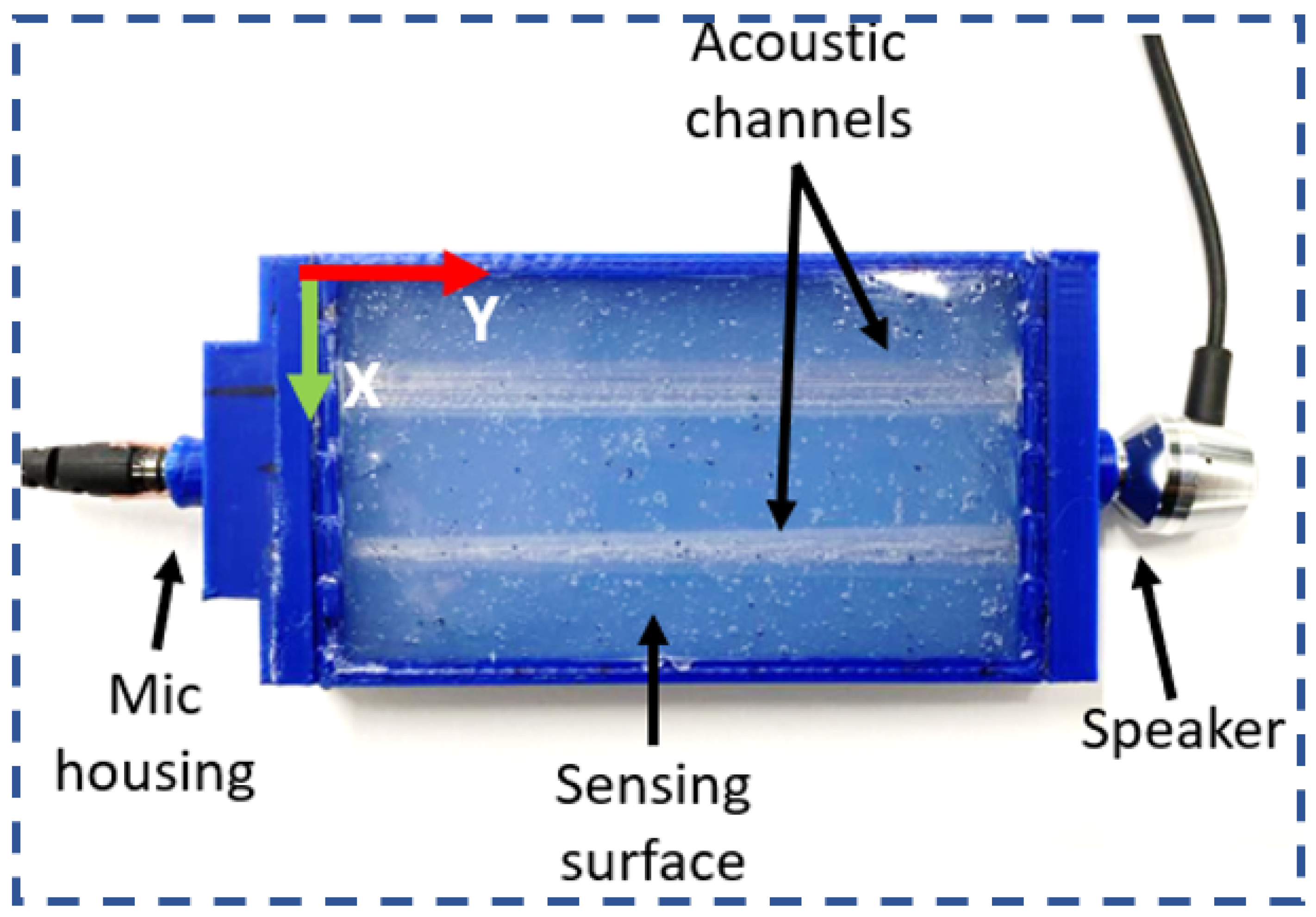
2.1.8. Acoustics
2.1.9. Fluid Based
2.1.10. Triboelectric
2.1.11. Combination of Various Methods

2.2. Tactile Features
2.2.1. Contact Force
2.2.2. Contact Location
2.2.3. Contact Deformation
2.2.4. Other Features
2.3. Advancements in Tactile Sensing
2.3.1. Low-Cost Tactile-Sensing Techniques
2.3.2. Self-Powered Tactile Sensors
2.3.3. Anti-Microbial Feature of Tactile Sensors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tactile Feature | Pr/Re | C | Cr | O | Ma | Pe | EIT | Ac | Tr | F | Com |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Normal Force | [101] | [82,89,102,103,104] | [32,56,57,84] | [70,105,106] | [53,90] | - | - | [71,91] | [77] | [76] | [78] |
| Shear Force | - | [82,87,104] | [84] | - | [53,90] | - | - | - | - | - | [78] |
| Tangential Force | - | [89,103] | - | - | - | - | - | - | - | - | - |
| Torque | - | [82,87] | [107] | - | [53] | - | - | - | - | - | [78] |
| Pressure | [81,88,108,109] | [87] | - | - | - | [110] | [55] | - | [111,112] | - | [79,80] |
| Vibration | - | - | - | - | - | - | - | - | - | [76] | [80] |
| Contact Location | [101] | - | [58,63,64,84] | [70,105] | [90] | - | [55] | [75,91,93] | - | - | [78,80] |
| Deformation/Object Shape/geometry | [101] | - | [59,62,65,68,107,113] | [17,114] | - | - | - | [71,72,74] | - | [115] | [80] |
| Surface texture | - | - | [60,63,116] | [117] | - | - | - | - | [77] | [76] | - |
| Pose/Orientation | - | - | [66,67] | - | - | - | - | - | - | - | - |
| Temperature | - | - | - | - | - | - | - | [93] | - | - | [79] |
3. Tactile Sensors in Robotics and Automation
3.1. Food Item Feature Extraction
3.2. Food Item Gras**
3.3. Food Item Identification
3.4. Selective Harvesting Motion Planning and Control
3.5. Food Preparation and Kitchen Robotics
3.6. Summary
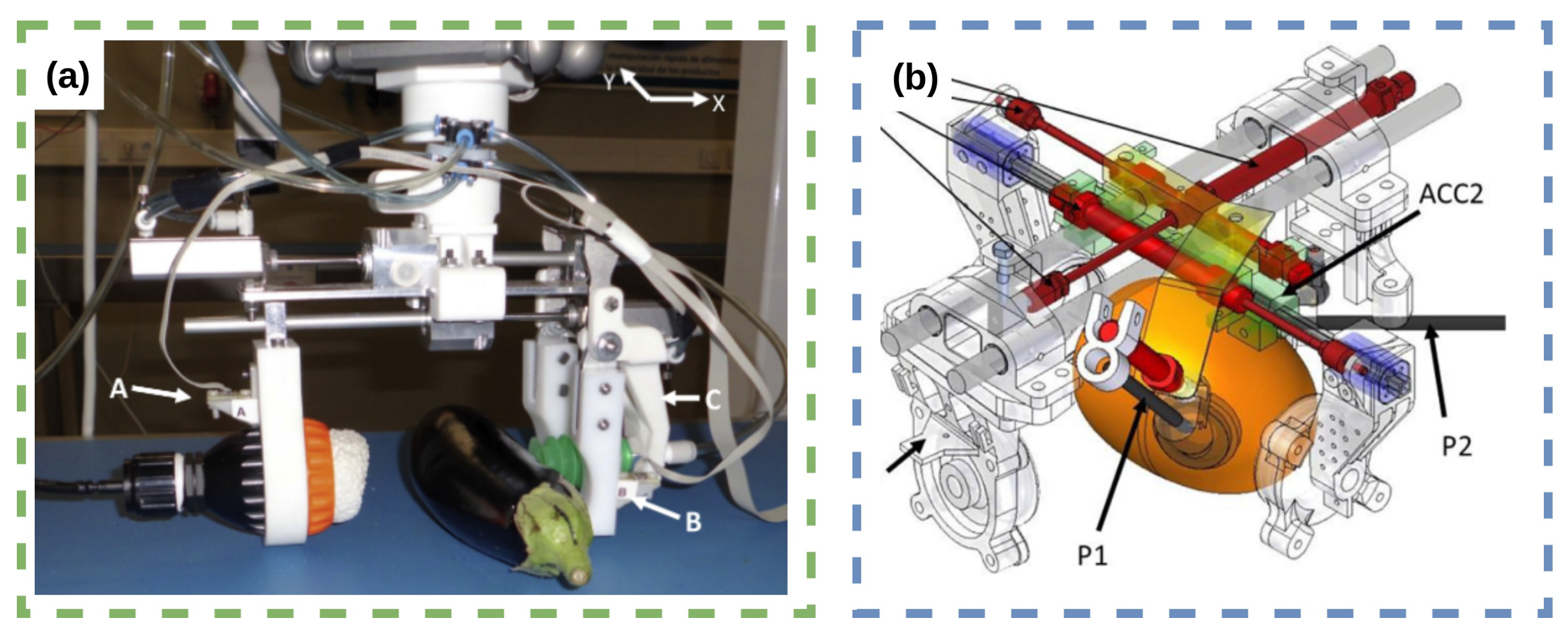
4. Applications of Tactile Sensors in Agri-Food
4.1. Force Control
4.2. Robotic Gras**
4.3. Slip Detection
4.4. Texture Recognition
4.5. Compliance Control
4.6. Object Recognition
4.7. Three-Dimensional Shape Reconstruction
4.8. Haptic Feedback
4.9. Object Pushing
4.10. Summary
5. Complexities Associated with Tactile Sensors
5.1. Tactile Feature Extraction
5.1.1. Geometric Features
5.1.2. Dynamic Features
5.1.3. Controller Features
5.2. Robot Controller
5.2.1. Grasp Control
5.2.2. Motion Planning
5.2.3. Learning from Demonstration
5.3. Sensor Fusion
5.4. Sensor Calibration
5.5. The Curse of Dimensionality
5.6. Hardware Integration and Scalibility
5.6.1. Rigid Links Grippers
5.6.2. Soft Grippers
5.6.3. Tactile Skin
6. Future Trends and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Duckett, T.; Pearson, S.; Blackmore, S.; Grieve, B.; Chen, W.H.; Cielniak, G.; Cleaversmith, J.; Dai, J.; Davis, S.; Fox, C.; et al. Agricultural robotics: The future of robotic agriculture. ar**. Math. Probl. Eng. 2021, 2021, 7157763. [Google Scholar] [CrossRef]
- Li, N.; Yin, Z.; Zhang, W.; ** Method for Robotic Fruit Harvesting. ar**+Method+for+Robotic+Fruit+Harvesting&author=Zhou,+H.&author=Wang,+X.&author=Kang,+H.&author=Chen,+C.&publication_year=2021&journal=ar** and manipulation under leaf interference. Sensors 2022, 22, 5483. [Google Scholar] [CrossRef]
- Misimi, E.; Olofsson, A.; Eilertsen, A.; Øye, E.R.; Mathiassen, J.R. Robotic handling of compliant food objects by robust learning from demonstration. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6972–6979. [Google Scholar]
- Schuetz, C.; Pfaff, J.; Sygulla, F.; Rixen, D.; Ulbrich, H. Motion planning for redundant manipulators in uncertain environments based on tactile feedback. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 6387–6394. [Google Scholar]
- Nazari, K.; Gandolfi, G.; Talebpour, Z.; Rajendran, V.; Rocco, P.; Ghalamzan E, A. Deep Functional Predictive Control for Strawberry Cluster Manipulation using Tactile Prediction. ar**. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 4740–4745. [Google Scholar]
- Zhang, T.; Cong, Y.; Li, X.; Peng, Y. Robot tactile sensing: Vision based tactile sensor for force perception. In Proceedings of the 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Tian**, China, 19 July–23 July 2018; pp. 1360–1365. [Google Scholar]
- Ward-Cherrier, B.; Pestell, N.; Cramphorn, L.; Winstone, B.; Giannaccini, M.E.; Rossiter, J.; Lepora, N.F. The tactip family: Soft optical tactile sensors with 3d-printed biomimetic morphologies. Soft Robot. 2018, 5, 216–227. [Google Scholar] [CrossRef]
- Lin, X.; Wiertlewski, M. Sensing the frictional state of a robotic skin via subtractive color mixing. IEEE Robot. Autom. Lett. 2019, 4, 2386–2392. [Google Scholar] [CrossRef]
- Ward-Cherrier, B.; Pestell, N.; Lepora, N.F. Neurotac: A neuromorphic optical tactile sensor applied to texture recognition. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 2654–2660. [Google Scholar]
- Sferrazza, C.; D’Andrea, R. Design, motivation and evaluation of a full-resolution optical tactile sensor. Sensors 2019, 19, 928. [Google Scholar] [CrossRef]
- Do, W.K.; Kennedy, M. DenseTact: Optical tactile sensor for dense shape reconstruction. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 6188–6194. [Google Scholar]
- Li, R.; Platt, R.; Yuan, W.; ten Pas, A.; Roscup, N.; Srinivasan, M.A.; Adelson, E. Localization and manipulation of small parts using gelsight tactile sensing. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3988–3993. [Google Scholar]
- Gomes, D.F.; Luo, S. GelTip tactile sensor for dexterous manipulation in clutter. In Tactile Sensing, Skill Learning, and Robotic Dexterous Manipulation; Elsevier: Amsterdam, The Netherlands, 2022; pp. 3–21. [Google Scholar]
- Romero, B.; Veiga, F.; Adelson, E. Soft, round, high resolution tactile fingertip sensors for dexterous robotic manipulation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4796–4802. [Google Scholar]
- Padmanabha, A.; Ebert, F.; Tian, S.; Calandra, R.; Finn, C.; Levine, S. Omnitact: A multi-directional high-resolution touch sensor. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 618–624. [Google Scholar]
- Alspach, A.; Hashimoto, K.; Kuppuswamy, N.; Tedrake, R. Soft-bubble: A highly compliant dense geometry tactile sensor for robot manipulation. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 597–604. [Google Scholar] [CrossRef]
- Lambeta, M.; Chou, P.W.; Tian, S.; Yang, B.; Maloon, B.; Most, V.R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; et al. Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation. IEEE Robot. Autom. Lett. 2020, 5, 3838–3845. [Google Scholar] [CrossRef]
- Trueeb, C.; Sferrazza, C.; D’Andrea, R. Towards vision-based robotic skins: A data-driven, multi-camera tactile sensor. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 333–338. [Google Scholar]
- Kappassov, Z.; Baimukashev, D.; Kuanyshuly, Z.; Massalin, Y.; Urazbayev, A.; Varol, H.A. Color-Coded Fiber-Optic Tactile Sensor for an Elastomeric Robot Skin. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 2146–2152. [Google Scholar] [CrossRef]
- Chuang, C.H.; Weng, H.K.; Chen, J.W.; Shaikh, M.O. Ultrasonic tactile sensor integrated with TFT array for force feedback and shape recognition. Sens. Actuators A Phys. 2018, 271, 348–355. [Google Scholar] [CrossRef]
- Shinoda, H.; Ando, S. A tactile sensor with 5-D deformation sensing element. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MI, USA, 22–28 April 1996; Volume 1, pp. 7–12. [Google Scholar]
- Ando, S.; Shinoda, H. Ultrasonic emission tactile sensing. IEEE Control Syst. Mag. 1995, 15, 61–69. [Google Scholar]
- Ando, S.; Shinoda, H.; Yonenaga, A.; Terao, J. Ultrasonic six-axis deformation sensing. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 1031–1045. [Google Scholar] [CrossRef] [PubMed]
- Shinoda, H.; Ando, S. Ultrasonic emission tactile sensor for contact localization and characterization. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 2536–2543. [Google Scholar]
- Gong, D.; He, R.; Yu, J.; Zuo, G. A pneumatic tactile sensor for co-operative robots. Sensors 2017, 17, 2592. [Google Scholar] [CrossRef] [PubMed]
- Yao, G.; Xu, L.; Cheng, X.; Li, Y.; Huang, X.; Guo, W.; Liu, S.; Wang, Z.L.; Wu, H. Bioinspired triboelectric nanogenerators as self-powered electronic skin for robotic tactile sensing. Adv. Funct. Mater. 2020, 30, 1907312. [Google Scholar] [CrossRef]
- Lu, Z.; Gao, X.; Yu, H. GTac: A biomimetic tactile sensor with skin-like heterogeneous force feedback for robots. IEEE Sens. J. 2022, 22, 14491–14500. [Google Scholar] [CrossRef]
- Ma, M.; Zhang, Z.; Zhao, Z.; Liao, Q.; Kang, Z.; Gao, F.; Zhao, X.; Zhang, Y. Self-powered flexible antibacterial tactile sensor based on triboelectric-piezoelectric-pyroelectric multi-effect coupling mechanism. Nano Energy 2019, 66, 104105. [Google Scholar] [CrossRef]
- Park, K.; Yuk, H.; Yang, M.; Cho, J.; Lee, H.; Kim, J. A biomimetic elastomeric robot skin using electrical impedance and acoustic tomography for tactile sensing. Sci. Robot. 2022, 7, eabm7187. [Google Scholar] [CrossRef] [PubMed]
- Chang, K.; Guo, M.; Pu, L.; Dong, J.; Li, L.; Ma, P.; Huang, Y.; Liu, T. Wearable nanofibrous tactile sensors with fast response and wireless communication. Chem. Eng. J. 2023, 451, 138578. [Google Scholar] [CrossRef]
- Ham, J.; Huh, T.M.; Kim, J.; Kim, J.O.; Park, S.; Cutkosky, M.R.; Bao, Z. Porous Dielectric Elastomer Based Flexible Multiaxial Tactile Sensor for Dexterous Robotic or Prosthetic Hands. Adv. Mater. Technol. 2023, 8, 2200903. [Google Scholar] [CrossRef]
- Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible piezoelectric tactile sensor array for dynamic three-axis force measurement. Sensors 2016, 16, 819. [Google Scholar] [CrossRef]
- Andrussow, I.; Sun, H.; Kuchenbecker, K.J.; Martius, G. Minsight: A Fingertip-Sized Vision-Based Tactile Sensor for Robotic Manipulation. Adv. Intell. Syst. 2023, 2300042. [Google Scholar] [CrossRef]
- Yousef, H.; Boukallel, M.; Althoefer, K. Tactile sensing for dexterous in-hand manipulation in robotics—A review. Sens. Actuators A Phys. 2011, 167, 171–187. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile sensing—From humans to humanoids. IEEE Trans. Robot. 2009, 26, 1–20. [Google Scholar] [CrossRef]
- Zheng, H.; **, Y.; Wang, H.; Zhao, P. DotView: A Low-Cost Compact Tactile Sensor for Pressure, Shear, and Torsion Estimation. IEEE Robot. Autom. Lett. 2023, 8, 880–887. [Google Scholar] [CrossRef]
- Sygulla, F.; Ellensohn, F.; Hildebrandt, A.C.; Wahrmann, D.; Rixen, D. A flexible and low-cost tactile sensor for robotic applications. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Singapore, 29 May–3 June 2017; pp. 58–63. [Google Scholar]
- Yao, T.; Guo, X.; Li, C.; Qi, H.; Lin, H.; Liu, L.; Dai, Y.; Qu, L.; Huang, Z.; Liu, P.; et al. Highly sensitive capacitive flexible 3D-force tactile sensors for robotic gras** and manipulation. J. Phys. D Appl. Phys. 2020, 53, 445109. [Google Scholar] [CrossRef]
- Yan, Y.; Hu, Z.; Yang, Z.; Yuan, W.; Song, C.; Pan, J.; Shen, Y. Soft magnetic skin for super-resolution tactile sensing with force self-decoupling. Sci. Robot. 2021, 6, eabc8801. [Google Scholar] [CrossRef]
- Vishnu, R.S.; Mandil, W.; Parsons, S.; Ghalamzan E, A. Acoustic Soft Tactile Skin (AST Skin). ar**. IEEE/ASME Trans. Mechatron. 2016, 21, 2214–2226. [Google Scholar] [CrossRef]
- Wall, V.; Zöller, G.; Brock, O. Passive and Active Acoustic Sensing for Soft Pneumatic Actuators. ar** force control of multi-fingered robotic hands through tactile sensing for object stabilization. Sensors 2020, 20, 1050. [Google Scholar] [CrossRef] [PubMed]
- Jara, C.A.; Pomares, J.; Candelas, F.A.; Torres, F. Control framework for dexterous manipulation using dynamic visual servoing and tactile sensors’ feedback. Sensors 2014, 14, 1787–1804. [Google Scholar] [CrossRef]
- Bicchi, A.; Kumar, V. Robotic gras** and contact: A review. In Proceedings of the 2000 ICRA, Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 348–353. [Google Scholar]
- Bekiroglu, Y.; Laaksonen, J.; Jorgensen, J.A.; Kyrki, V.; Kragic, D. Assessing grasp stability based on learning and haptic data. IEEE Trans. Robot. 2011, 27, 616–629. [Google Scholar] [CrossRef]
- Lynch, P.; Cullinan, M.F.; McGinn, C. Adaptive gras** of moving objects through tactile sensing. Sensors 2021, 21, 8339. [Google Scholar] [CrossRef]
- Kroemer, O.; Daniel, C.; Neumann, G.; Van Hoof, H.; Peters, J. Towards learning hierarchical skills for multi-phase manipulation tasks. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 26–30 May 2015; pp. 1503–1510. [Google Scholar]
- Kolamuri, R.; Si, Z.; Zhang, Y.; Agarwal, A.; Yuan, W. Improving grasp stability with rotation measurement from tactile sensing. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 6809–6816. [Google Scholar]
- Hogan, F.R.; Bauza, M.; Canal, O.; Donlon, E.; Rodriguez, A. Tactile regrasp: Grasp adjustments via simulated tactile transformations. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2963–2970. [Google Scholar]
- Mahler, J.; Liang, J.; Niyaz, S.; Laskey, M.; Doan, R.; Liu, X.; Ojea, J.A.; Goldberg, K. Dex-net 2.0: Deep learning to plan robust grasps with synthetic point clouds and analytic grasp metrics. ar**, and social robotics. Bioinspir. Biomim. 2023, 18, 025002. [Google Scholar] [CrossRef]
- Siegrist, M.; Hartmann, C. Consumer acceptance of novel food technologies. Nat. Food 2020, 1, 343–350. [Google Scholar] [CrossRef] [PubMed]
- Lezoche, M.; Hernandez, J.E.; Díaz, M.d.M.E.A.; Panetto, H.; Kacprzyk, J. Agri-food 4.0: A survey of the supply chains and technologies for the future agriculture. Comput. Ind. 2020, 117, 103187. [Google Scholar] [CrossRef]
- Carmela Annosi, M.; Brunetta, F.; Capo, F.; Heideveld, L. Digitalization in the agri-food industry: The relationship between technology and sustainable development. Manag. Decis. 2020, 58, 1737–1757. [Google Scholar] [CrossRef]
- Miranda, J.; Ponce, P.; Molina, A.; Wright, P. Sensing, smart and sustainable technologies for Agri-Food 4.0. Comput. Ind. 2019, 108, 21–36. [Google Scholar] [CrossRef]
- Gandarias, J.M.; Garcia-Cerezo, A.J.; Gomez-de Gabriel, J.M. CNN-based methods for object recognition with high-resolution tactile sensors. IEEE Sens. J. 2019, 19, 6872–6882. [Google Scholar] [CrossRef]
- Platkiewicz, J.; Lipson, H.; Hayward, V. Haptic edge detection through shear. Sci. Rep. 2016, 6, 23551. [Google Scholar] [CrossRef]
- Parvizi-Fard, A.; Amiri, M.; Kumar, D.; Iskarous, M.M.; Thakor, N.V. A functional spiking neuronal network for tactile sensing pathway to process edge orientation. Sci. Rep. 2021, 11, 1320. [Google Scholar] [CrossRef]
- Yuan, X.; Zou, J.; Sun, L.; Liu, H.; **, G. Soft tactile sensor and curvature sensor for caterpillar-like soft robot’s adaptive motion. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, Long Beach, CA, USA, 9–15 June 2019; pp. 690–695. [Google Scholar]
- Luo, S.; Mou, W.; Althoefer, K.; Liu, H. Novel tactile-sift descriptor for object shape recognition. IEEE Sens. J. 2015, 15, 5001–5009. [Google Scholar] [CrossRef]
- Amirkhani, G.; Goodridge, A.; Esfandiari, M.; Phalen, H.; Ma, J.H.; Iordachita, I.; Armand, M. Design and Fabrication of a Fiber Bragg Grating Shape Sensor for Shape Reconstruction of a Continuum Manipulator. IEEE Sens. J. 2023, 23, 12915–12929. [Google Scholar] [CrossRef]
- Sotgiu, E.; Aguiam, D.E.; Calaza, C.; Rodrigues, J.; Fernandes, J.; Pires, B.; Moreira, E.E.; Alves, F.; Fonseca, H.; Dias, R.; et al. Surface texture detection with a new sub-mm resolution flexible tactile capacitive sensor array for multimodal artificial finger. J. Microelectromech. Syst. 2020, 29, 629–636. [Google Scholar] [CrossRef]
- Pang, Y.; Xu, X.; Chen, S.; Fang, Y.; Shi, X.; Deng, Y.; Wang, Z.L.; Cao, C. Skin-inspired textile-based tactile sensors enable multifunctional sensing of wearables and soft robots. Nano Energy 2022, 96, 107137. [Google Scholar] [CrossRef]
- Abd, M.A.; Paul, R.; Aravelli, A.; Bai, O.; Lagos, L.; Lin, M.; Engeberg, E.D. Hierarchical tactile sensation integration from prosthetic fingertips enables multi-texture surface recognition. Sensors 2021, 21, 4324. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, G.; Zhan, B.; Hu, L.; Liu, T. Fine Texture Detection Based on a Solid–Liquid Composite Flexible Tactile Sensor Array. Micromachines 2022, 13, 440. [Google Scholar] [CrossRef]
- Choi, D.; Jang, S.; Kim, J.S.; Kim, H.J.; Kim, D.H.; Kwon, J.Y. A highly sensitive tactile sensor using a pyramid-plug structure for detecting pressure, shear force, and torsion. Adv. Mater. Technol. 2019, 4, 1800284. [Google Scholar] [CrossRef]
- Weng, L.; ** under pose uncertainty using tactile feedback. Auton. Robot. 2014, 36, 309–330. [Google Scholar]
- Papadimitriou, C.H. Computational complexity. In Encyclopedia of Computer Science; Wiley: Hoboken, NJ, USA, 2003; pp. 260–265. [Google Scholar]
- Kim, M.; Yang, J.; Kim, D.; Yun, D. Soft tactile sensor to detect the slip of a Robotic hand. Measurement 2022, 200, 111615. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, J.; ** posture of humanoid manipulator based on target shape analysis and force closure. Alex. Eng. J. 2022, 61, 3959–3969. [Google Scholar]
- He, L.; Lu, Q.; Abad, S.A.; Rojas, N.; Nanayakkara, T. Soft fingertips with tactile sensing and active deformation for robust gras** of delicate objects. IEEE Robot. Autom. Lett. 2020, 5, 2714–2721. [Google Scholar] [CrossRef]
- Wen, R.; Yuan, K.; Wang, Q.; Heng, S.; Li, Z. Force-guided high-precision gras** control of fragile and deformable objects using semg-based force prediction. IEEE Robot. Autom. Lett. 2020, 5, 2762–2769. [Google Scholar] [CrossRef]
- Yin, Z.H.; Huang, B.; Qin, Y.; Chen, Q.; Wang, X. Rotating without Seeing: Towards In-hand Dexterity through Touch. ar** system and grasp stability prediction based on flexible tactile sensor array. Machines 2021, 9, 119. [Google Scholar] [CrossRef]
- Funabashi, S.; Morikuni, S.; Geier, A.; Schmitz, A.; Ogasa, S.; Torno, T.P.; Somlor, S.; Sugano, S. Object recognition through active sensing using a multi-fingered robot hand with 3d tactile sensors. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2589–2595. [Google Scholar]
- Wang, L.; Ma, L.; Yang, J.; Wu, J. Human somatosensory processing and artificial somatosensation. Cyborg Bionic Syst. 2021, 2021, 9843259. [Google Scholar] [CrossRef]
- Langdon, A.J.; Boonstra, T.W.; Breakspear, M. Multi-frequency phase locking in human somatosensory cortex. Prog. Biophys. Mol. Biol. 2011, 105, 58–66. [Google Scholar] [CrossRef]
- Härtner, J.; Strauss, S.; Pfannmöller, J.; Lotze, M. Tactile acuity of fingertips and hand representation size in human Area 3b and Area 1 of the primary somatosensory cortex. NeuroImage 2021, 232, 117912. [Google Scholar] [CrossRef] [PubMed]
- Abdeetedal, M.; Kermani, M.R. Grasp and stress analysis of an underactuated finger for proprioceptive tactile sensing. IEEE/ASME Trans. Mechatron. 2018, 23, 1619–1629. [Google Scholar] [CrossRef]
- Ntagios, M.; Nassar, H.; Pullanchiyodan, A.; Navaraj, W.T.; Dahiya, R. Robotic hands with intrinsic tactile sensing via 3D printed soft pressure sensors. Adv. Intell. Syst. 2020, 2, 1900080. [Google Scholar] [CrossRef]
- Luo, S.; Zhou, X.; Tang, X.; Li, J.; Wei, D.; Tai, G.; Chen, Z.; Liao, T.; Fu, J.; Wei, D.; et al. Microconformal electrode-dielectric integration for flexible ultrasensitive robotic tactile sensing. Nano Energy 2021, 80, 105580. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft robotic grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef]
- Dahiya, R.; Akinwande, D.; Chang, J.S. Flexible electronic skin: From humanoids to humans [scanning the issue]. Proc. IEEE 2019, 107, 2011–2015. [Google Scholar] [CrossRef]
- Zhang, Y.; Lin, Z.; Huang, X.; You, X.; Ye, J.; Wu, H. A Large-Area, Stretchable, Textile-Based Tactile Sensor. Adv. Mater. Technol. 2020, 5, 1901060. [Google Scholar] [CrossRef]








| Robot Task Type | Tactile Sensor Type | Cited Research |
|---|---|---|
| Robot Control Tasks | Force Control | [45,86,122,123,124,124] |
| Robotic Gras** | [123,125,126,127,128,129,130,131,132,133] | |
| Slip Detection | [123,134,135,136,137,138,139,140,141,142,143,144,145,146,147,148,149,150] | |
| Object Pushing | [29,121,179] | |
| Compliance Control | [163,164,165,166,167] | |
| Haptic Feedback | [174,175,176,177,178] | |
| Feature Extraction Tasks | Texture Recognition | [47,60,151,152,153,155,156,157,158,159,160,161,162] |
| Object Recognition | [43,45,86,120,156,160,168,169,170,171,172] | |
| 3D Shape Reconstruction | [44,62,173] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mandil, W.; Rajendran, V.; Nazari, K.; Ghalamzan-Esfahani, A. Tactile-Sensing Technologies: Trends, Challenges and Outlook in Agri-Food Manipulation. Sensors 2023, 23, 7362. https://doi.org/10.3390/s23177362
Mandil W, Rajendran V, Nazari K, Ghalamzan-Esfahani A. Tactile-Sensing Technologies: Trends, Challenges and Outlook in Agri-Food Manipulation. Sensors. 2023; 23(17):7362. https://doi.org/10.3390/s23177362
Chicago/Turabian StyleMandil, Willow, Vishnu Rajendran, Kiyanoush Nazari, and Amir Ghalamzan-Esfahani. 2023. "Tactile-Sensing Technologies: Trends, Challenges and Outlook in Agri-Food Manipulation" Sensors 23, no. 17: 7362. https://doi.org/10.3390/s23177362