
Development of a Vision-Based Unmanned Ground Vehicle for Map** and Tennis Ball Collection: A Fuzzy Logic Approach



Abstract
:1. Introduction
2. Materials and Methods
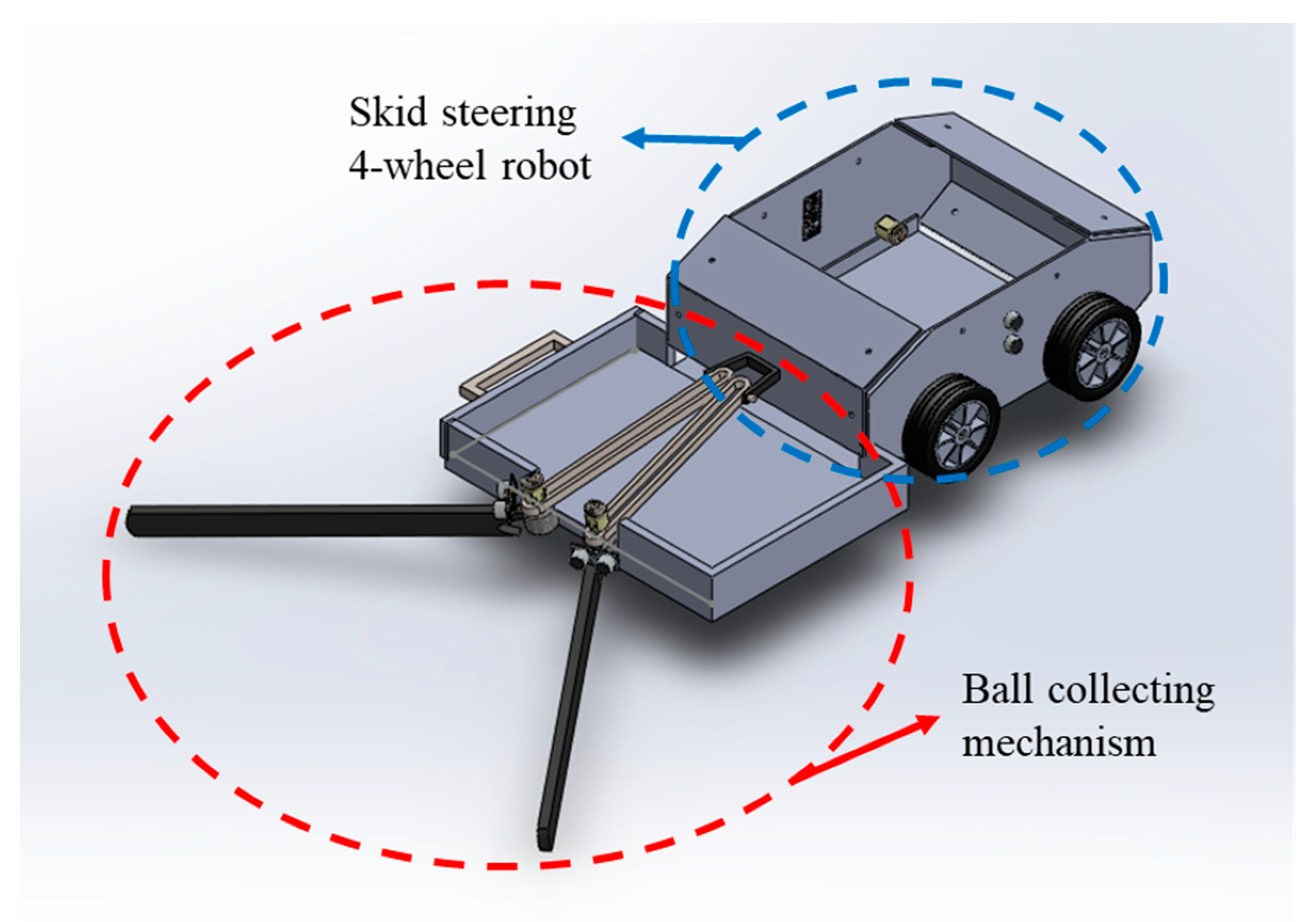
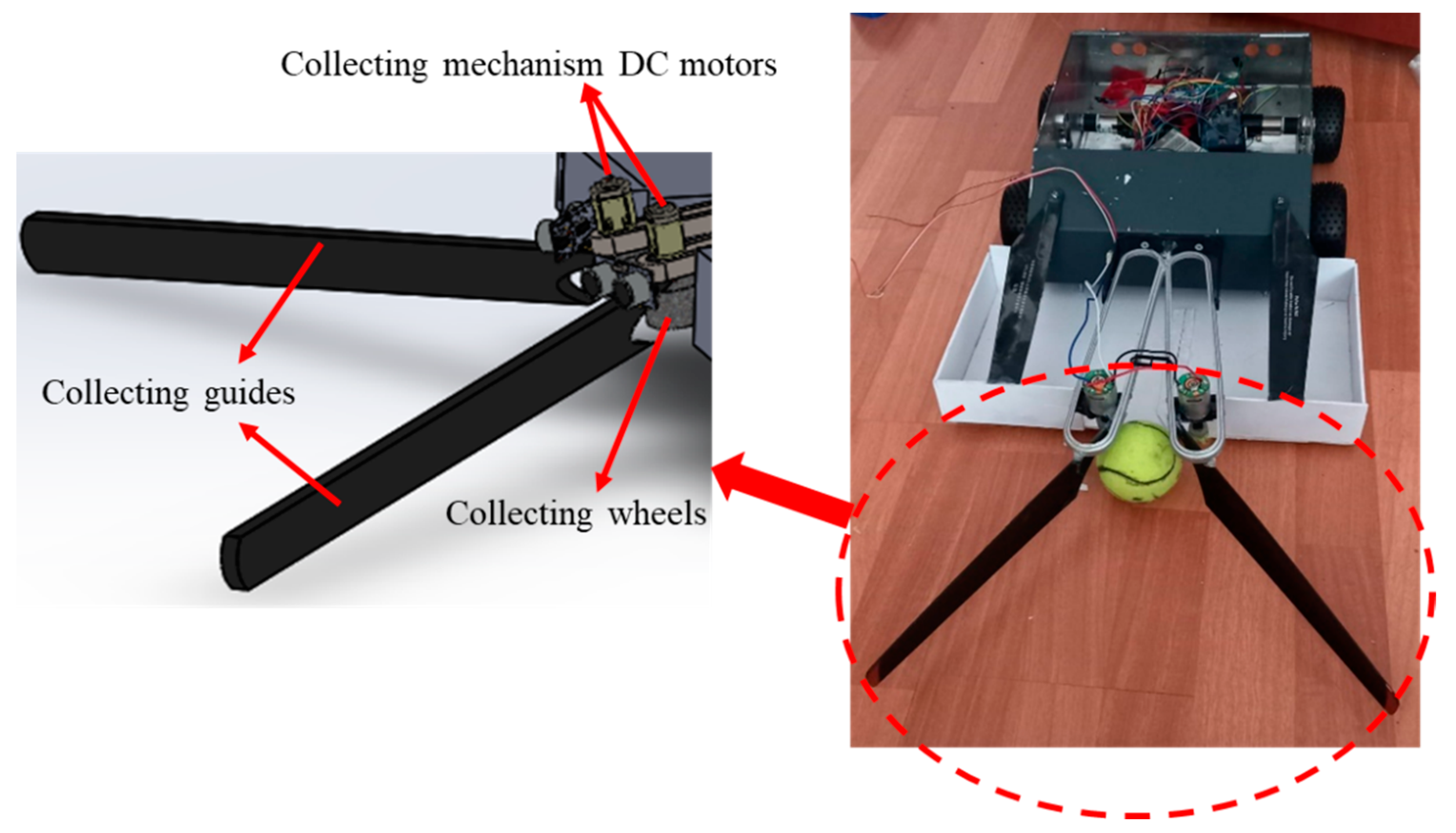
2.1. Structural Design
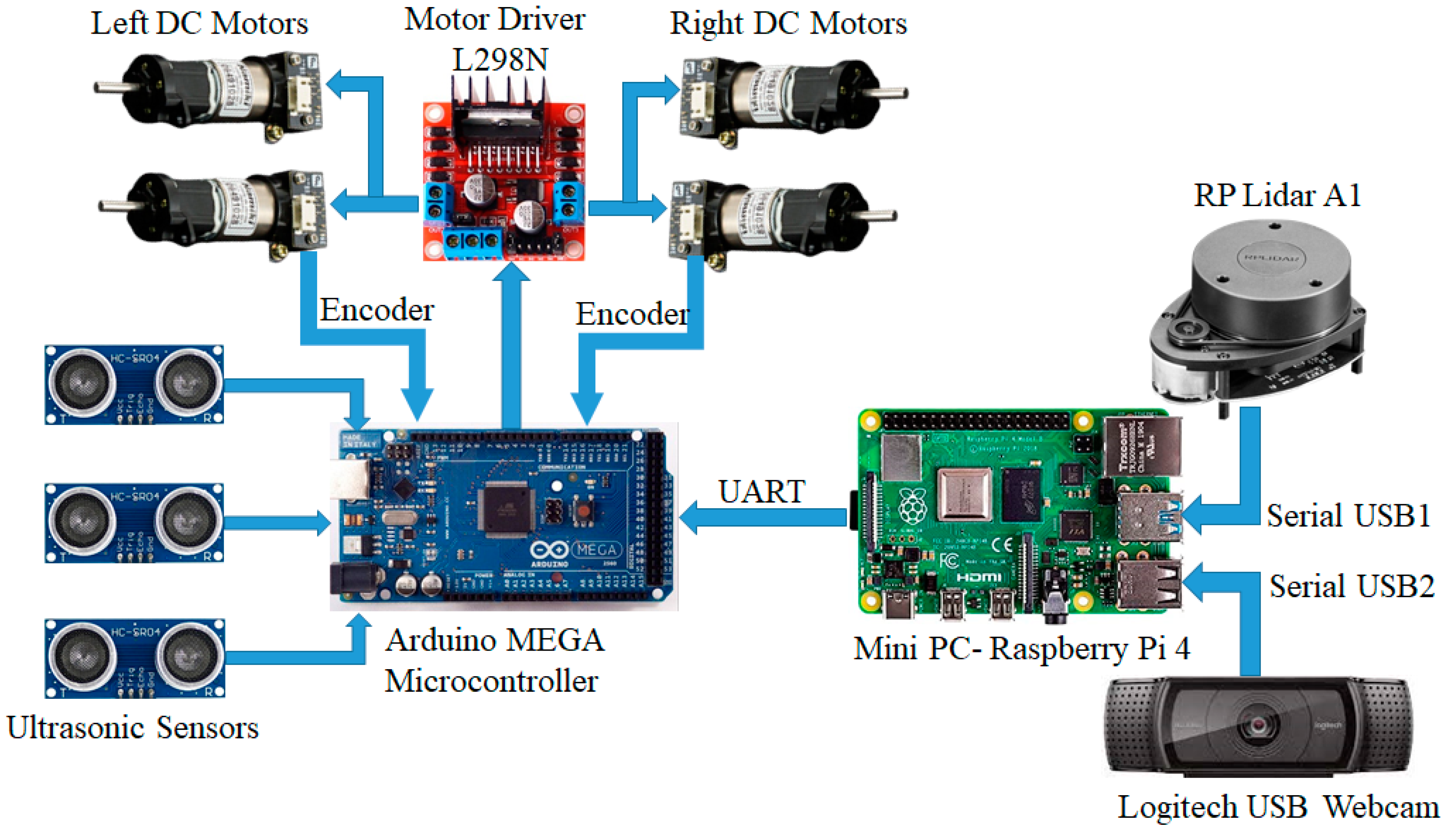
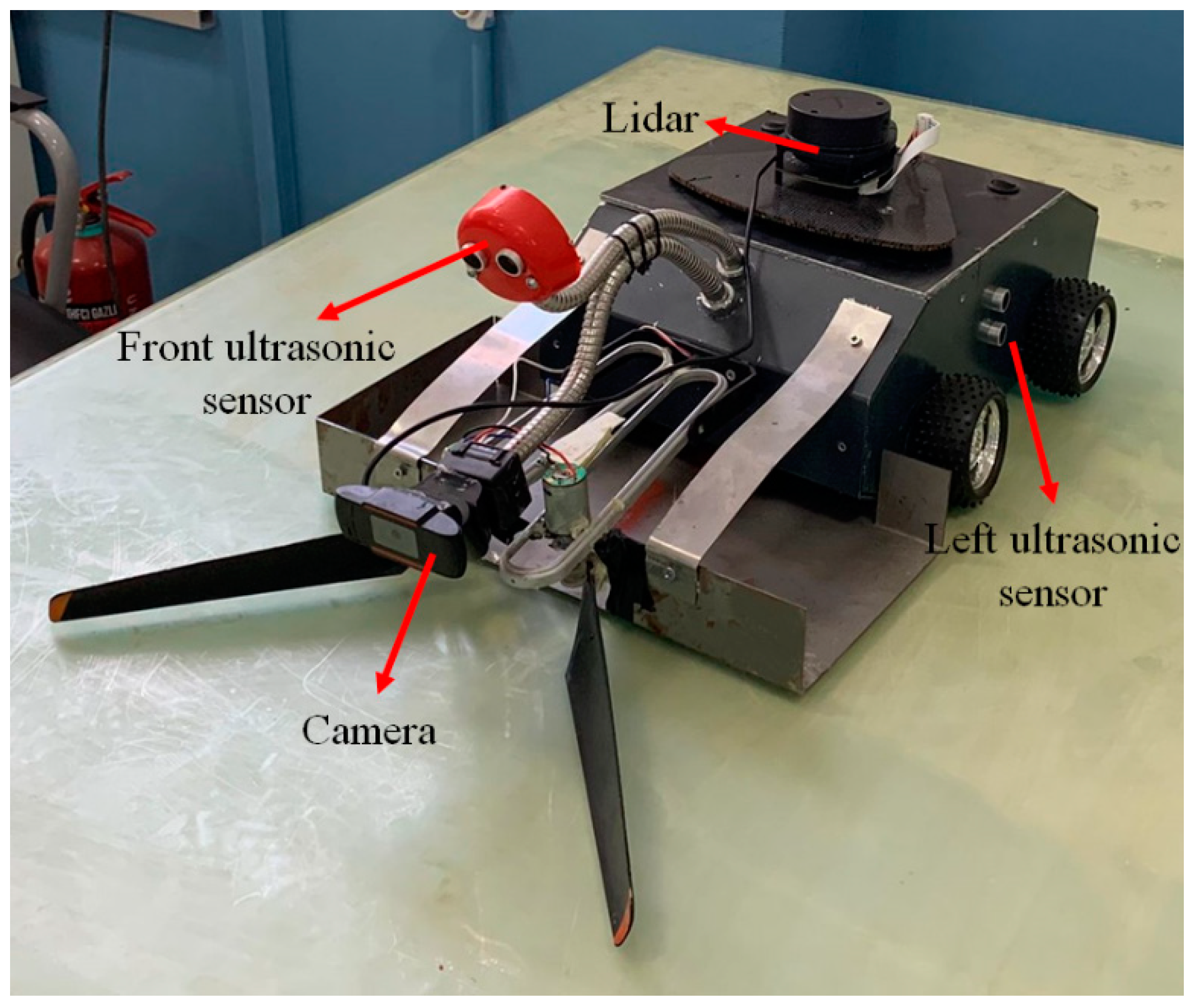
2.2. Robot Electronics
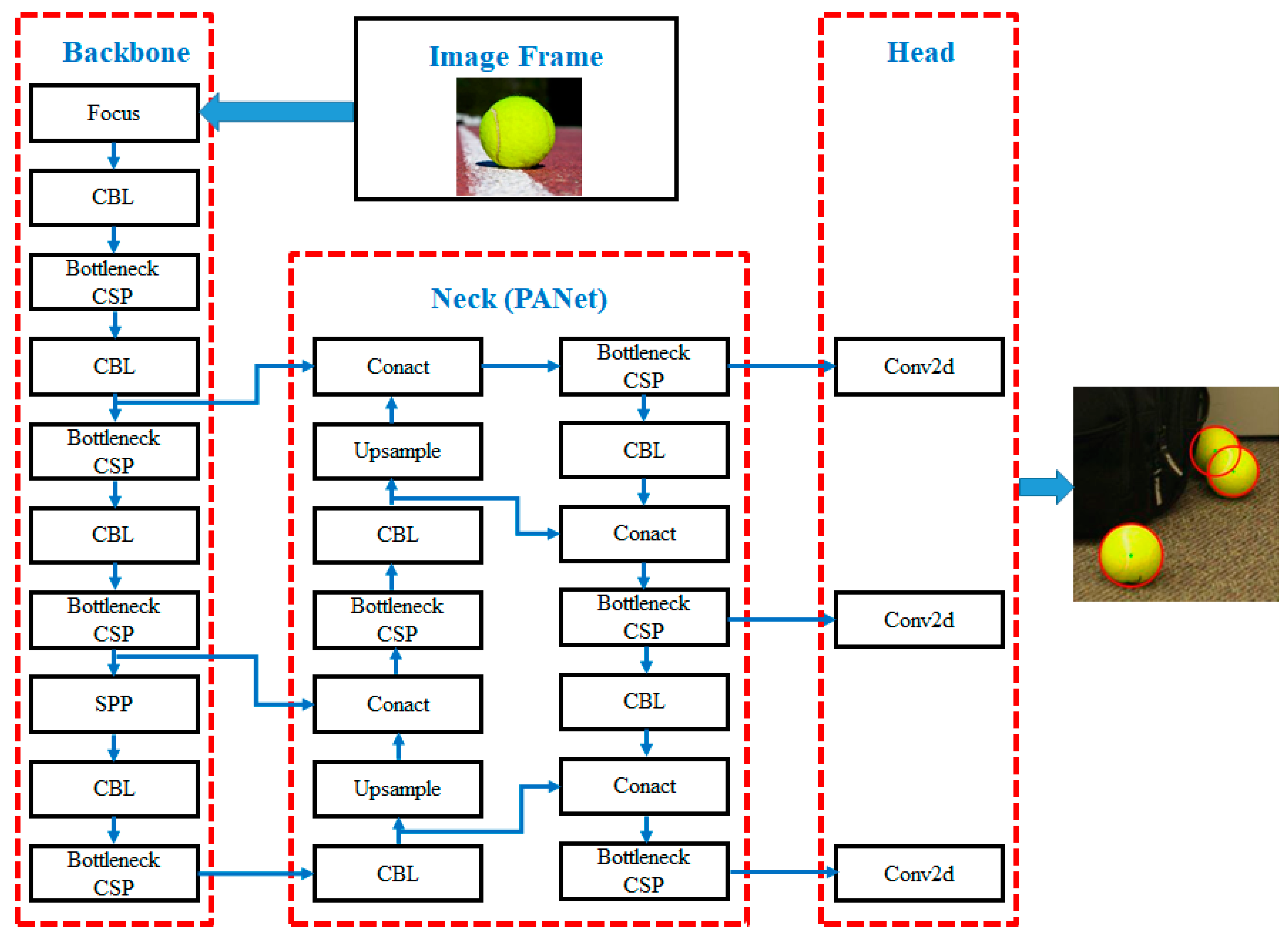
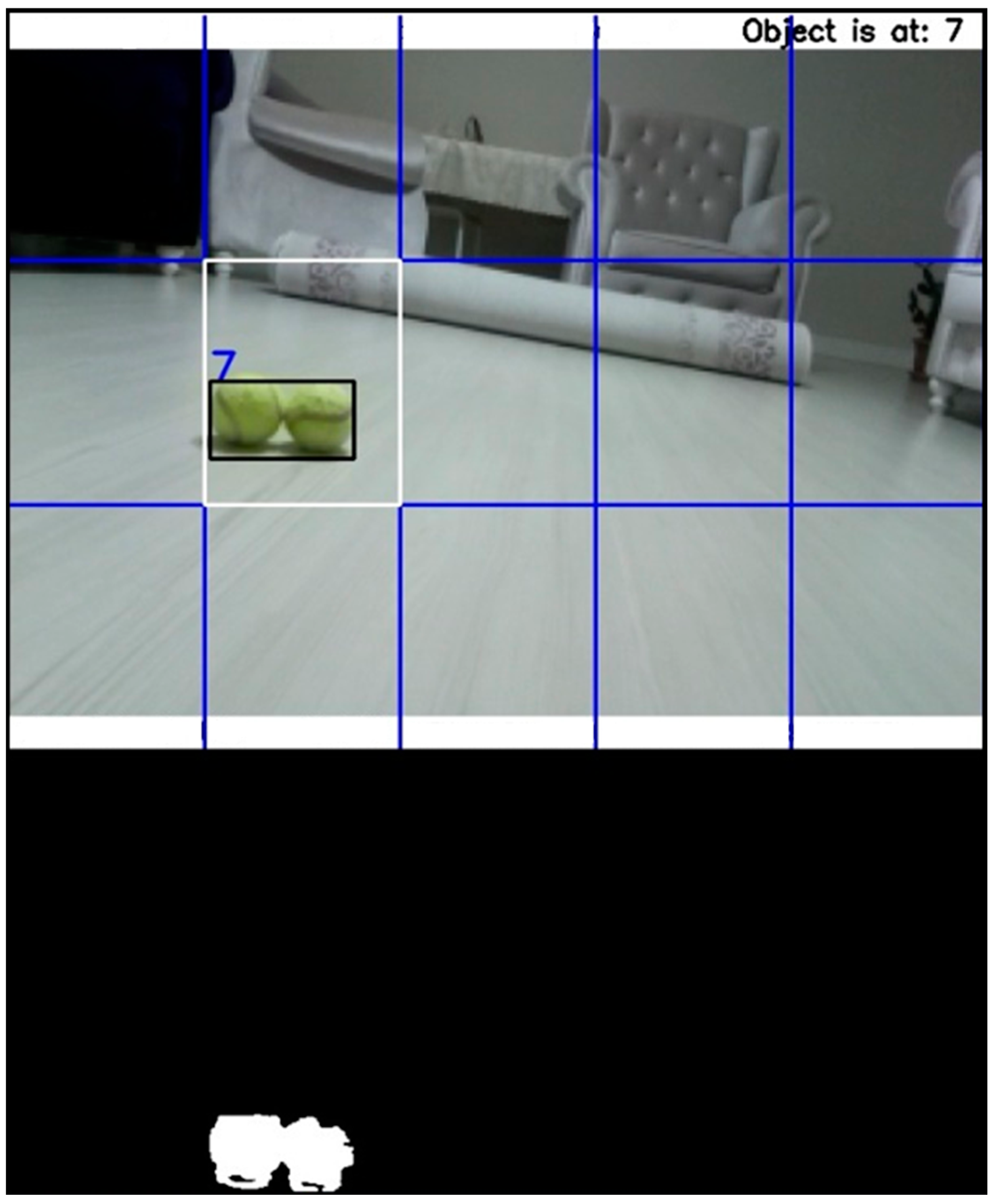
2.3. Tennis Ball Detection Using YOLOv5
- a
- The backbone, which consists of a CNN layer that combines image properties at multiple scales.
- b
- The neck, which is a layer collection that is used to gather visual attributes and pass them to prediction.
- c
- The head, which collects neck parameters and performs localization and classification.
2.4. Environment Map** Using the Hector Slam Method
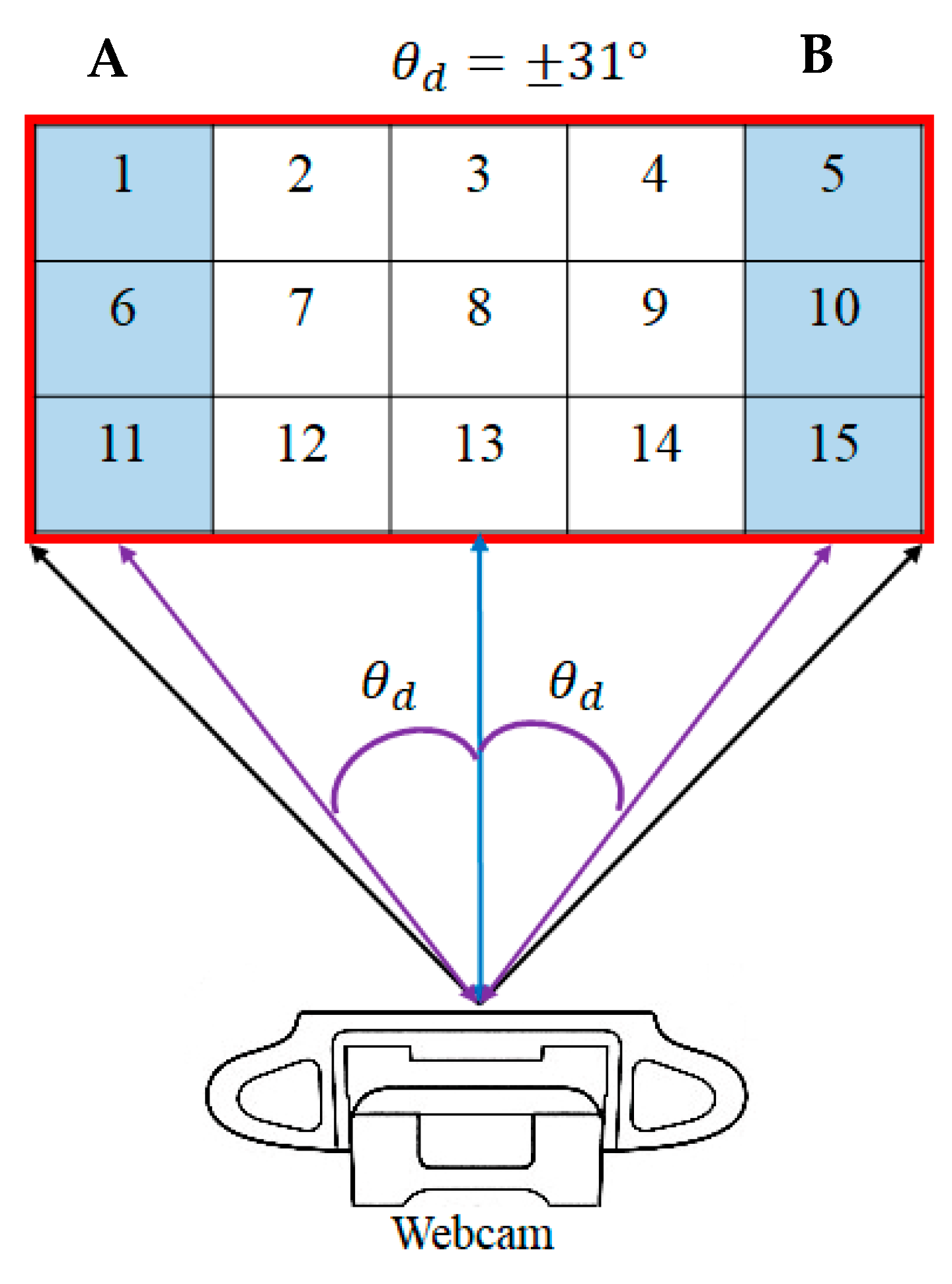
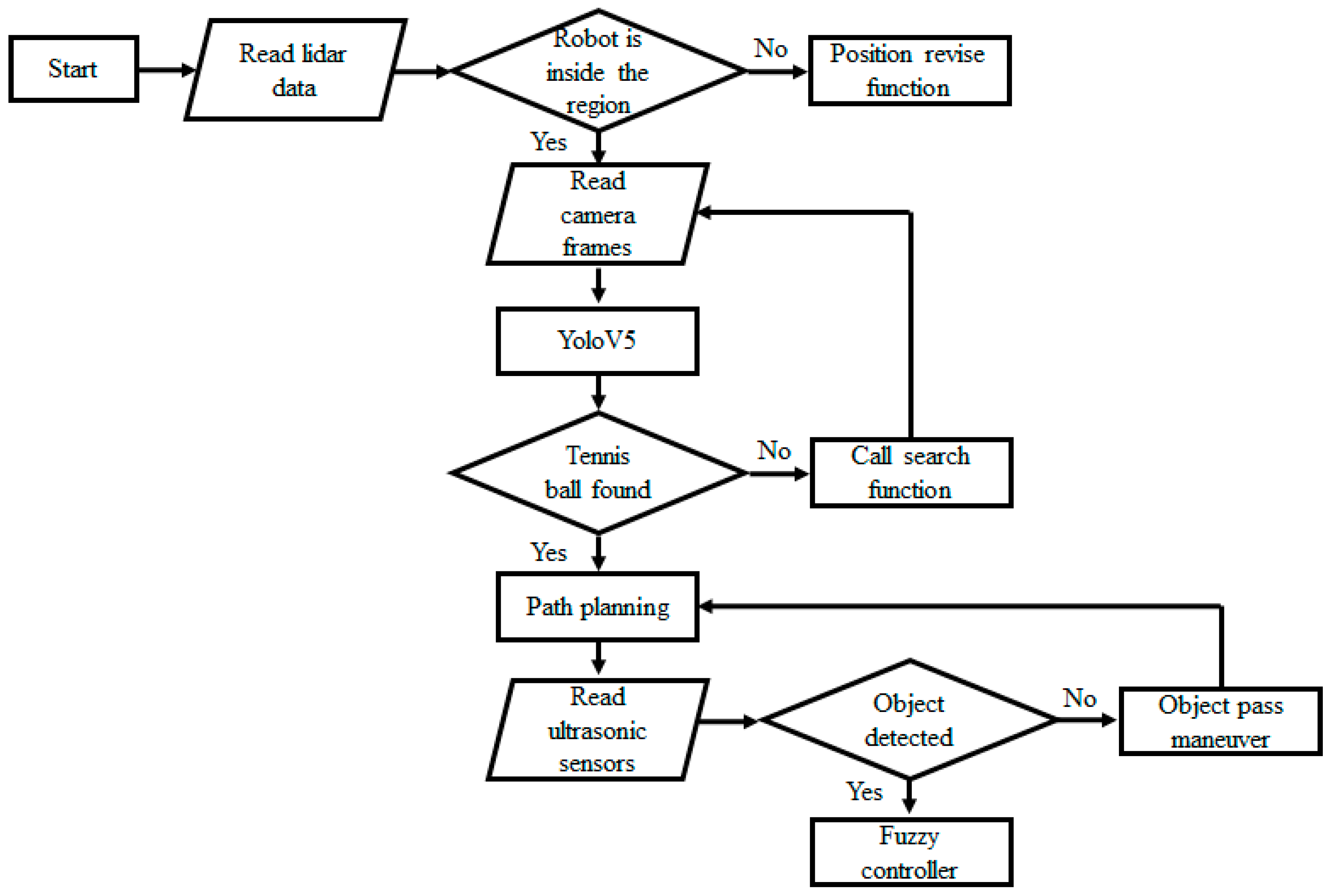
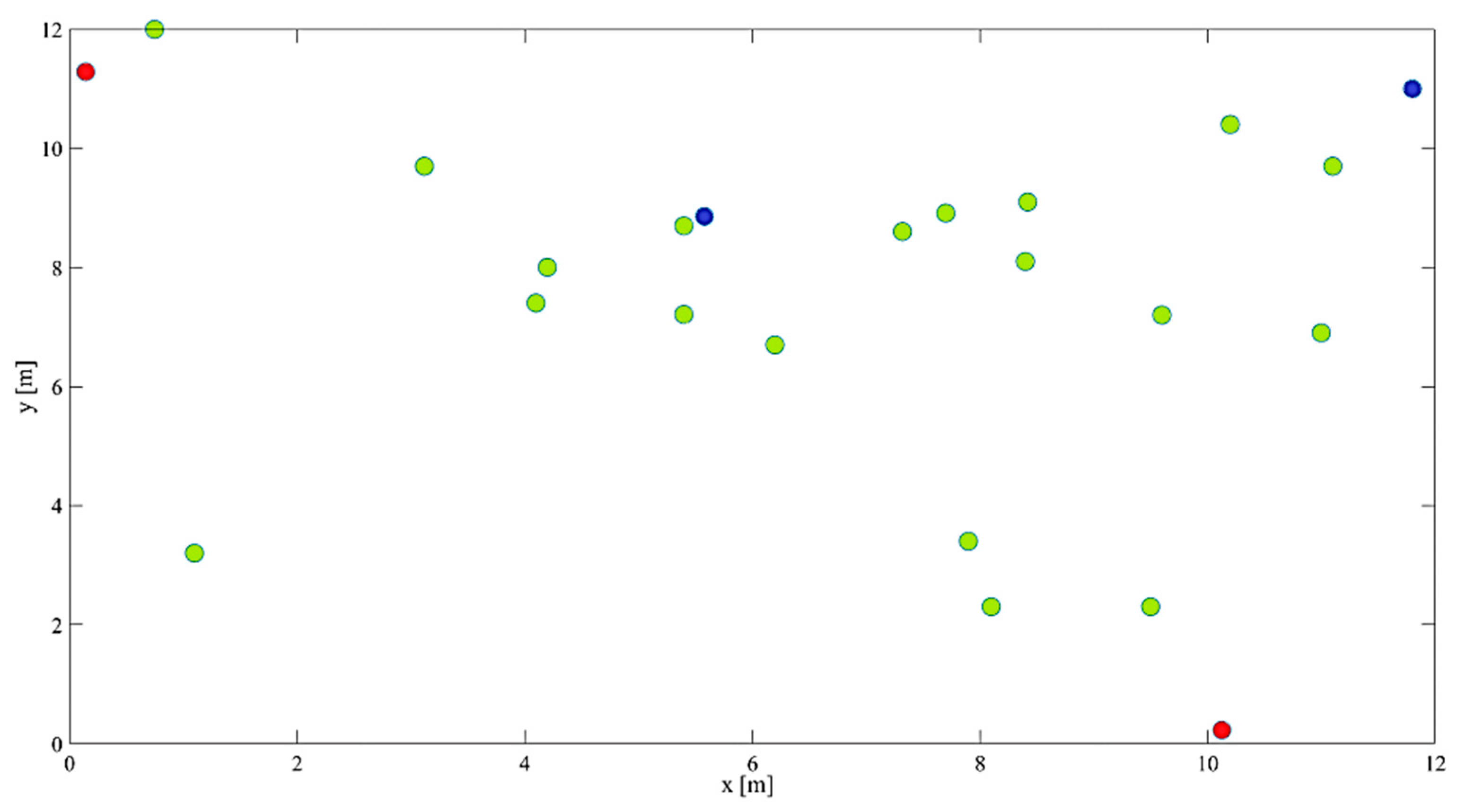
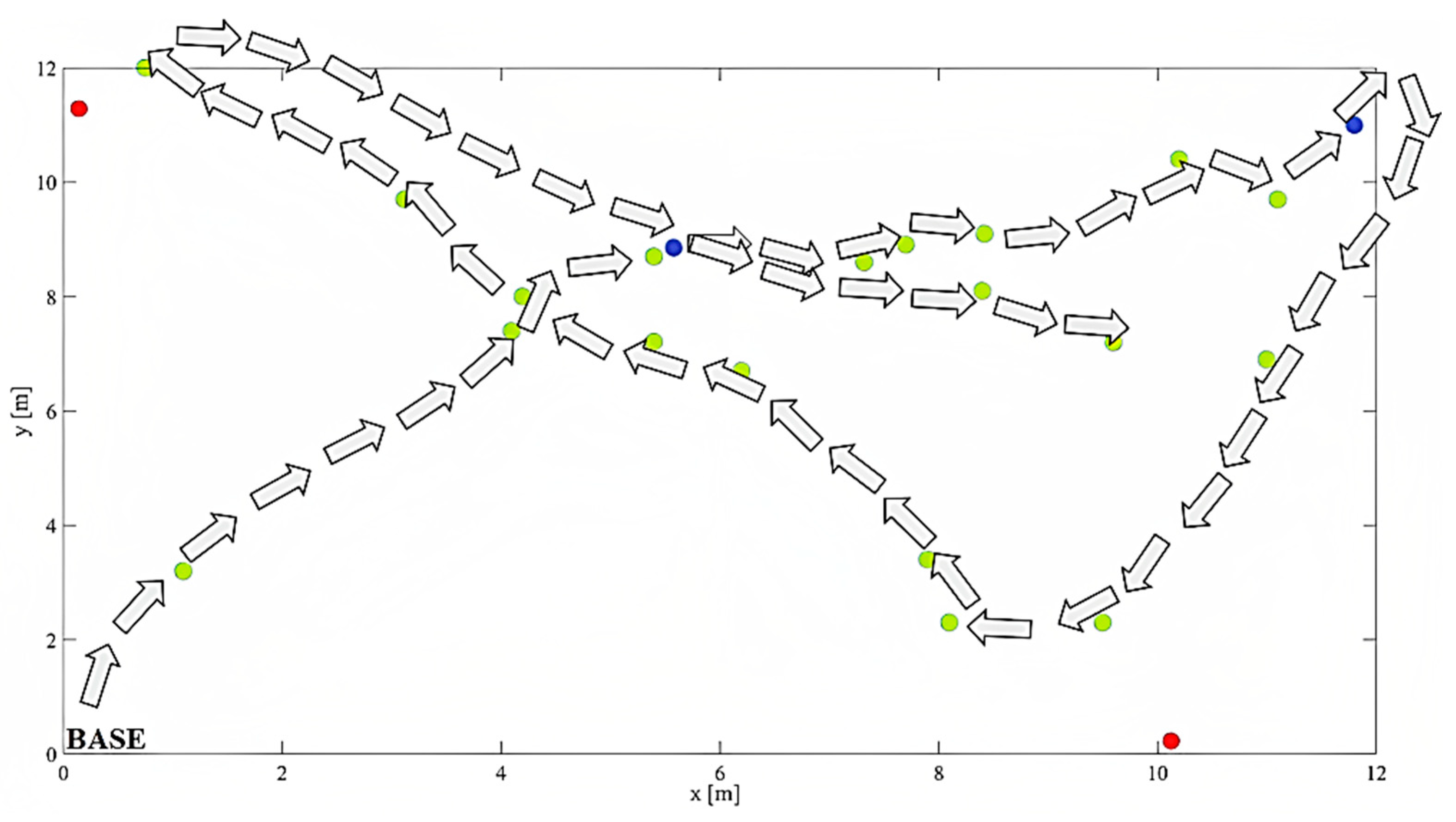
2.5. Navigation and Path Planning
- Searching for the working environment of the tennis balls.
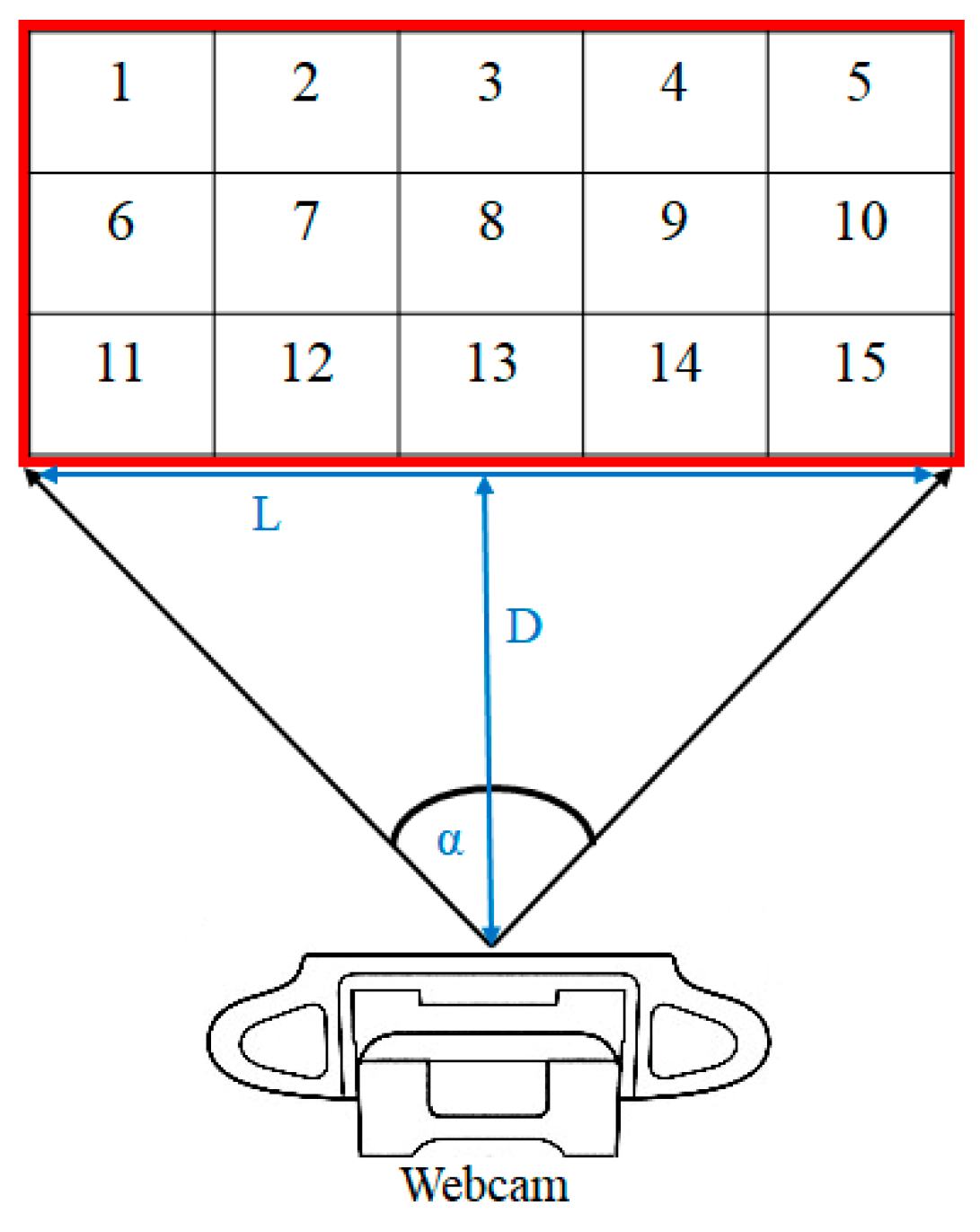
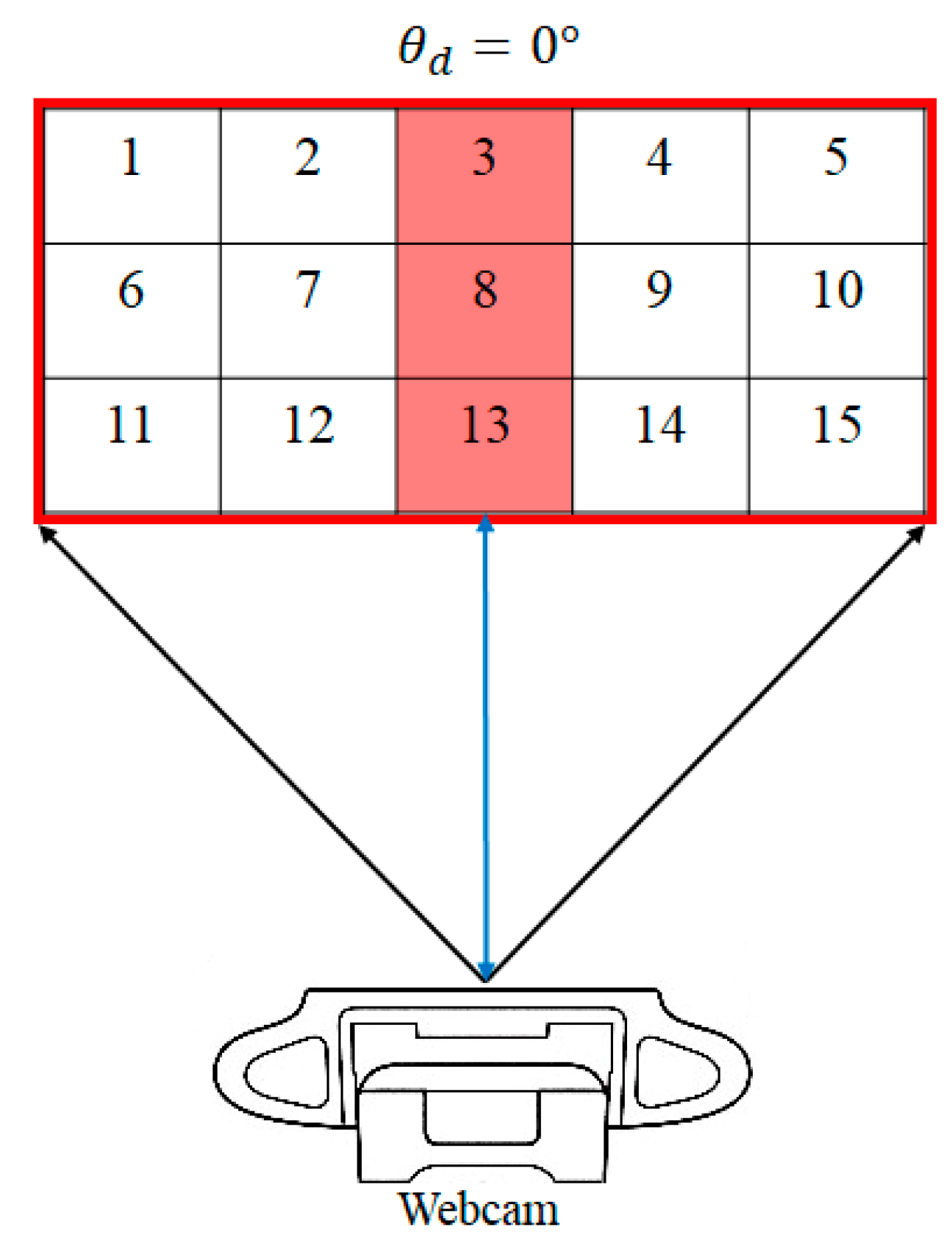
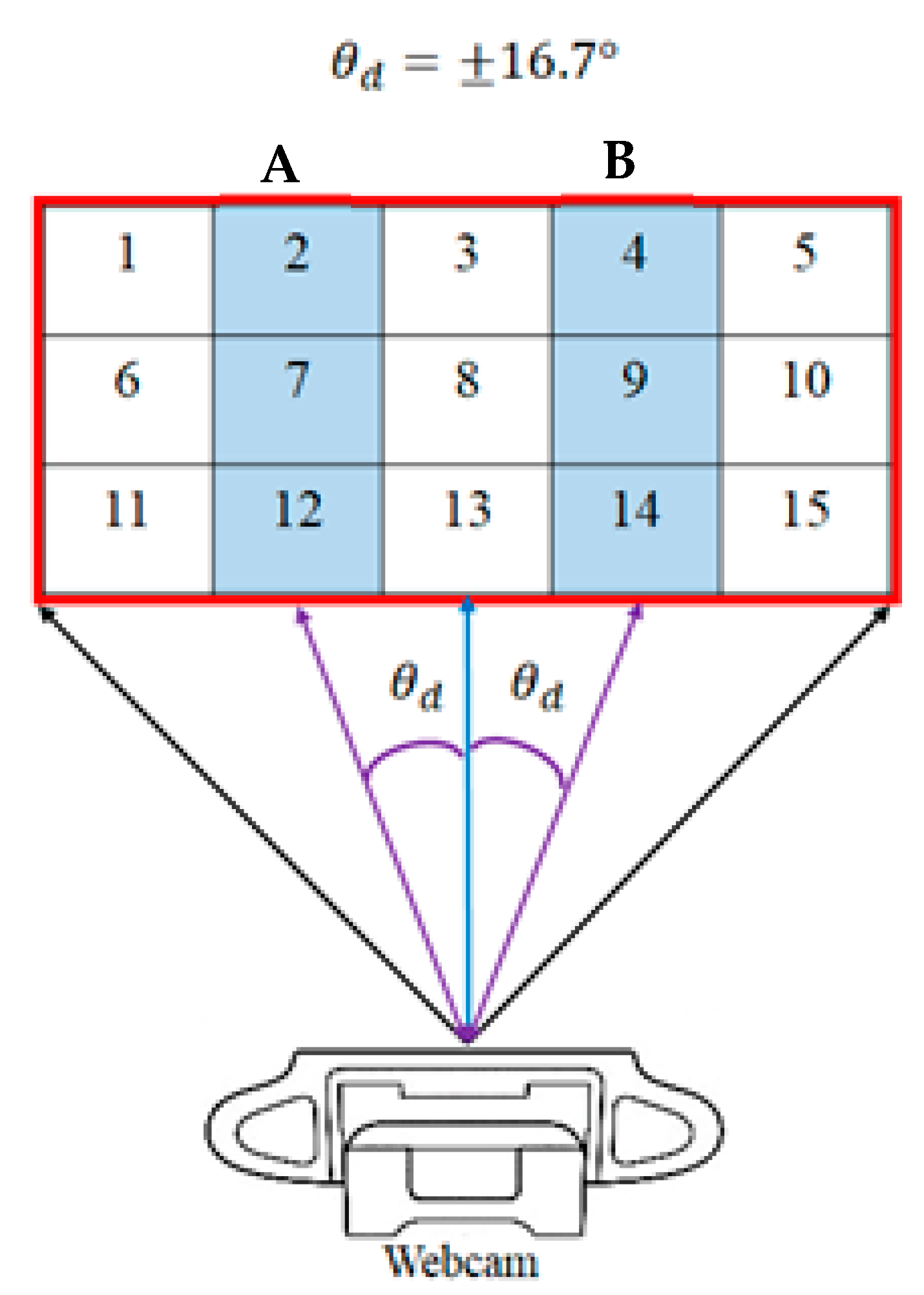
- Path planning for the robot to the nearest balls using a single webcam.
- Collision detection and obstacle avoidance.
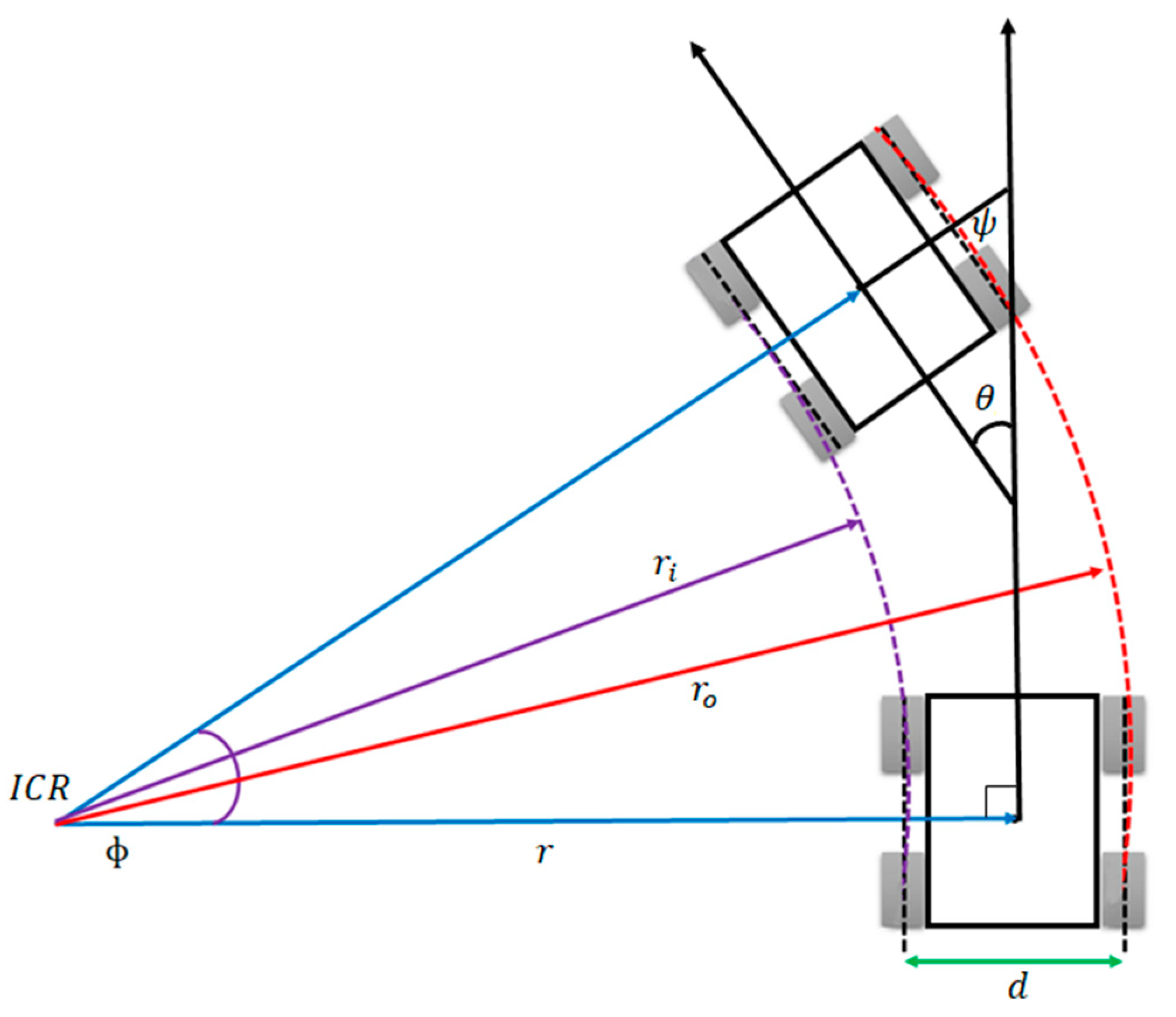
- Calculating the desired heading angle for the navigation of the robot.
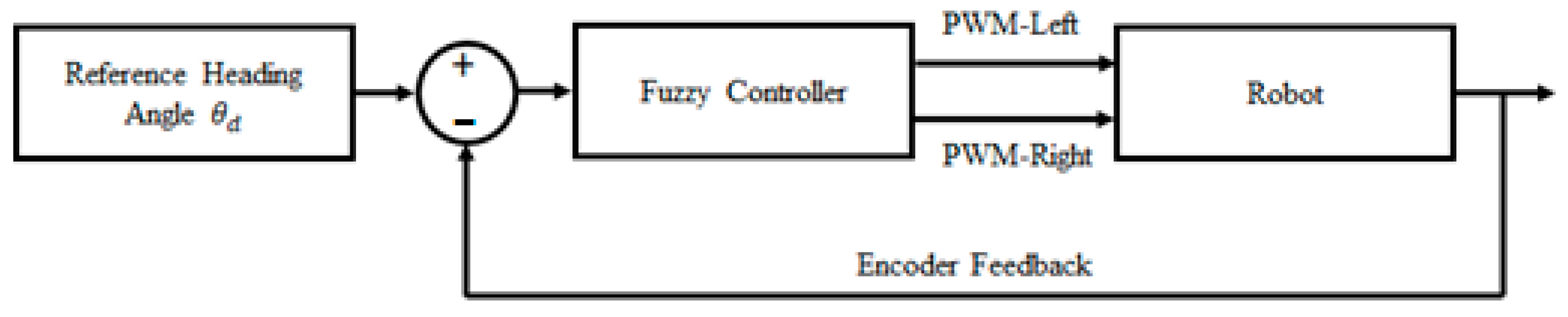
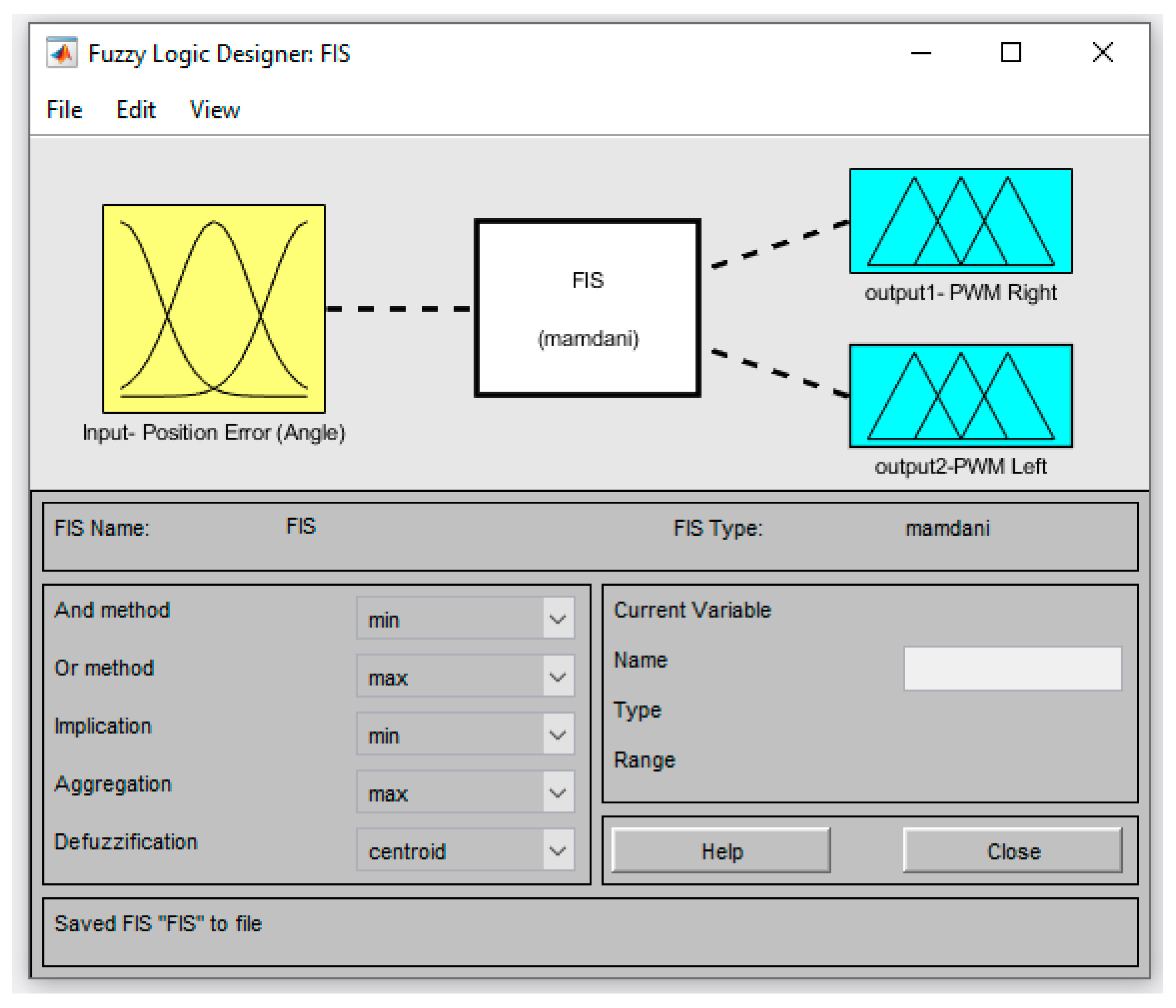
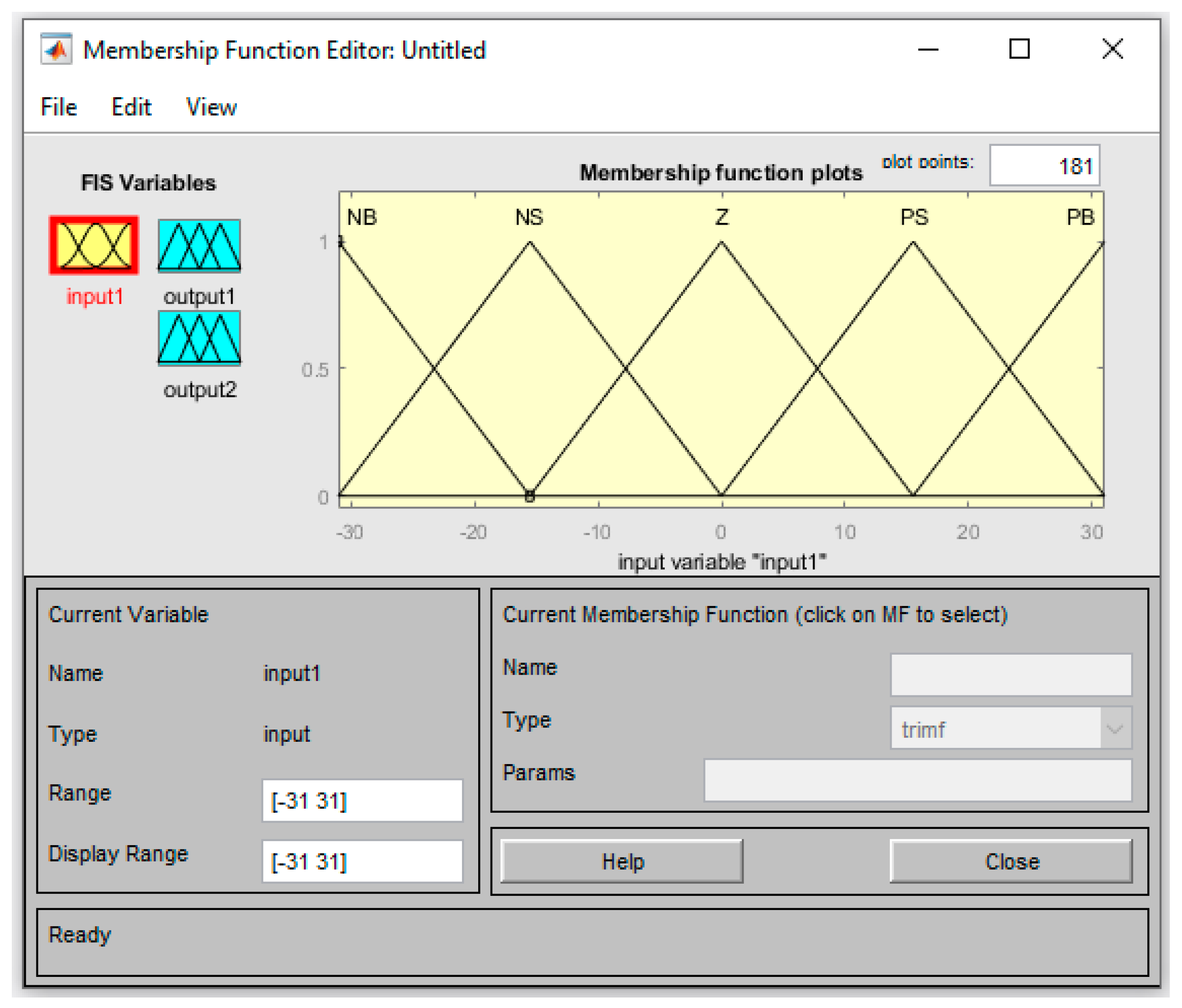
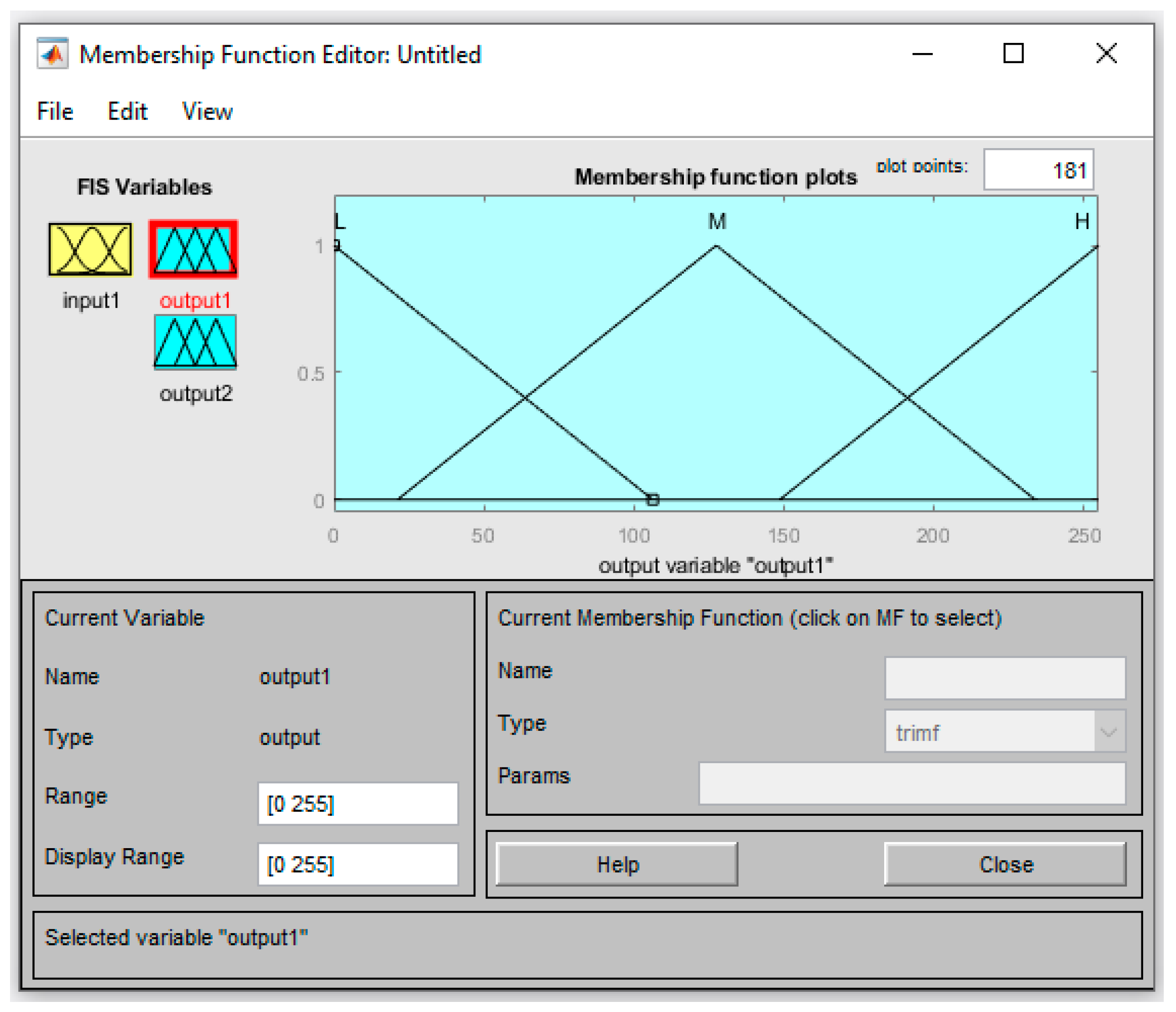
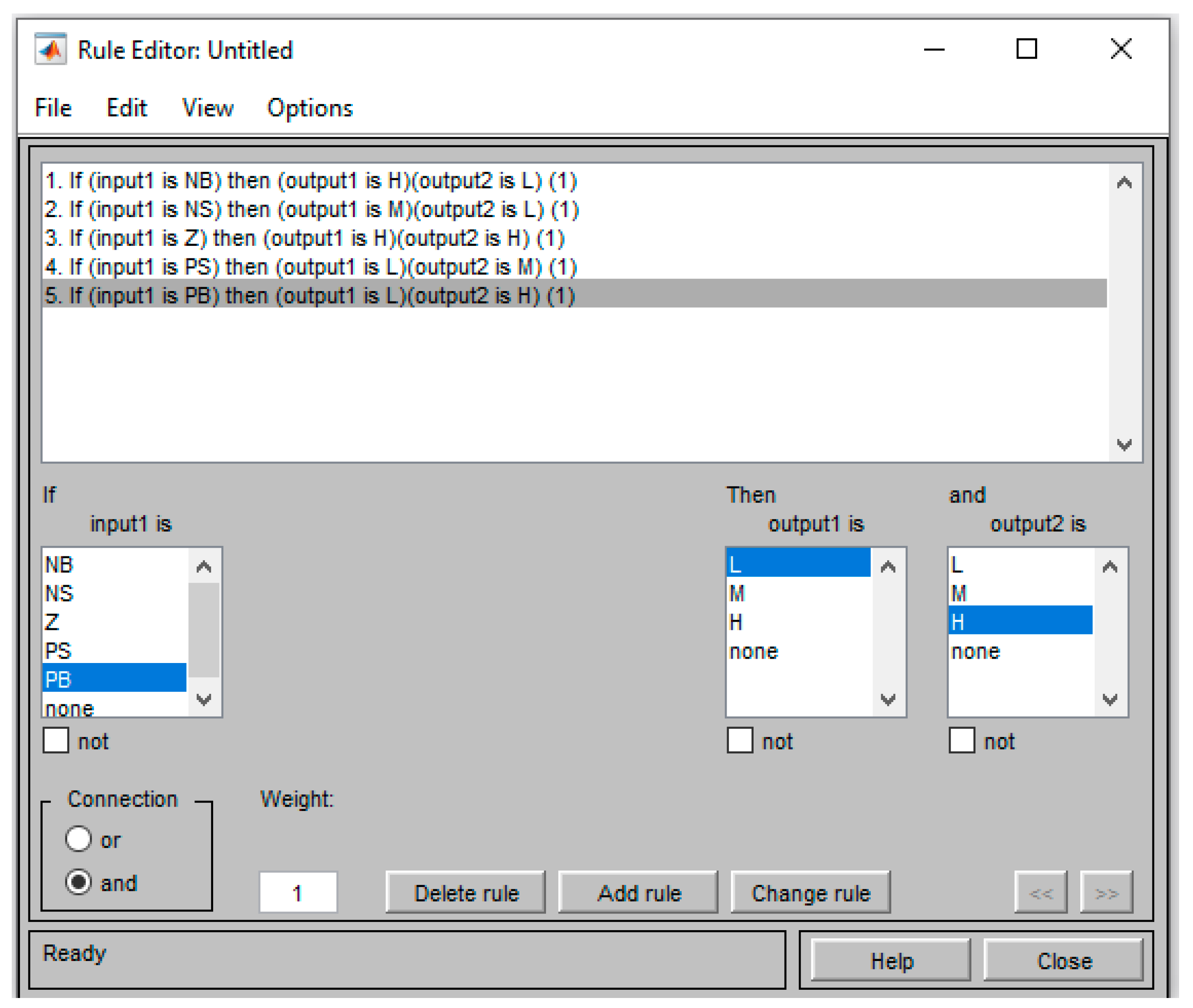
2.6. Robot Control
Fuzzy Controller Design
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Aamer, N.; Ramachandran, S. Neural networks based adaptive approach for path planning and obstacle avoidance for autonomous mobile robot (amr). Int. J. Res. Comput. Appl. Robot. (IJRCAR) 2015, 3, 66–79. [Google Scholar]
- Rashidnejhad, S.; Asfia, A.H.; Osgouie, K.G.; Meghdari, A.; Azizi, A. Optimal Trajectory Planning for Parallel Robots Considering Time-Jerk. Appl. Mech. Mater. 2013, 390, 471–477. [Google Scholar] [CrossRef]
- Azizi, A.; Entesari, F.; Osgouie, K.G.; Cheragh, M. Intelligent Mobile Robot Navigation in an Uncertain Dynamic Environment. Appl. Mech. Mater. 2013, 367, 388–392. [Google Scholar] [CrossRef]
- Azizi, A. Applications of Artificial Intelligence Techniques to Enhance Sustainability of Industry 4.0: Design of an Artificial Neural Network Model as Dynamic Behavior Optimizer of Robotic Arms. Complexity 2020, 2020, 8564140. [Google Scholar] [CrossRef]
- Latifinavid, M.; Azizi, A. Kinematic Modelling and Position Control of A 3-DOF Parallel Stabilizing Robot Manipulator. J. Intell. Robot. Syst. 2023, 107, 17. [Google Scholar] [CrossRef]
- Foo, S.W. Design and Develop of an Automated Tennis Ball Collector and Launcher Robot for both Able-Bodied and Wheelchair tennis Players-Ball Recognition Systems. Doctoral Dissertation, UTAR, Petaling Jaya, Malaysia, 2012. [Google Scholar]
- Liu, Y.; Li, S.; **, localization and autonomous navigation using a Pioneer 3-DX robot and their relevant issues. In Proceedings of the 2011 Saudi International Electronics, Communications and Photonics Conference (SIECPC), Riyadh, Saudi Arabia, 24–26 April 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–5. [Google Scholar]
- Shen, D.; Xu, Y.; Huang, Y. Research on 2D-SLAM of indoor mobile robot based on laser radar. In Proceedings of the 2019 4th International Conference on Automation, Control and Robotics Engineering, Shenzhen, China, 19–21 July 2019; pp. 1–7. [Google Scholar]
- Yan, L.; Dai, J.C.; Tan, J.X. SLAM laser point cloud overall fine registration pose technology. J. Surv. Mapp. 2019, 48, 313–321. [Google Scholar]
- Kohlbrecher, S.; Von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable SLAM system with full 3D motion estimation. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 155–160. [Google Scholar]
- Mishra, D.K.; Thomas, A.; Kuruvilla, J.; Kalyanasundaram, P.; Prasad, K.R.; Haldorai, A. Design of mobile robot navigation controller using neuro-fuzzy logic system. Comput. Electr. Eng. 2022, 101, 108044. [Google Scholar] [CrossRef]
- Lin, S.; Liu, A.; Wang, J.; Kong, X. A Review of Path-Planning Approaches for Multiple Mobile Robots. Machines 2022, 10, 773. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Supplied FPS | Detection Accuracy |
|---|---|---|
| YOLOv5 | 9 | 91% |
| HSV intensity limits | 21 | 71% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Latifinavid, M.; Azizi, A. Development of a Vision-Based Unmanned Ground Vehicle for Map** and Tennis Ball Collection: A Fuzzy Logic Approach. Future Internet 2023, 15, 84. https://doi.org/10.3390/fi15020084
Latifinavid M, Azizi A. Development of a Vision-Based Unmanned Ground Vehicle for Map** and Tennis Ball Collection: A Fuzzy Logic Approach. Future Internet. 2023; 15(2):84. https://doi.org/10.3390/fi15020084
Chicago/Turabian StyleLatifinavid, Masoud, and Aydin Azizi. 2023. "Development of a Vision-Based Unmanned Ground Vehicle for Map** and Tennis Ball Collection: A Fuzzy Logic Approach" Future Internet 15, no. 2: 84. https://doi.org/10.3390/fi15020084