1. Introduction
Monitoring of altimetry products through calibration and validation (Cal/Val) is essential for detecting any biases and trends in satellite observations and thus for ensuring long-term consistency and continuity of measurements obtained from different missions [
1]. There are four principal long-running Cal/Val sites around the world: (1) the Harvest platform site operated by the Jet Propulsion Lab/NASA (USA) [
2,
3,
4,
5], (2) the Corsica site run by the French Space Agency (CNES) [
6,
7,
8,
9,
10], (3) the Crete/Gavdos site managed by the Technical University of Crete (Greece) and the European Space Agency [
11,
12,
13], and (4) the Bass Strait site in Australia run by the University of Tasmania [
14,
15,
16]. In China, the Qianli Yan site in the Yellow Sea off the coast of Qingdao has also been operated in support of the Chinese HY-2 satellite altimeter as well as the Jason, Envisat, and Sentinel-3 series of satellites [
17,
18,
19]. In addition, Cal/Val sites such as the one on Lake Issykul, Kyrgyzstan, where certain oceanic error sources are reduced, are also used to provide altimeter biases [
20,
21,
22,
23]. The main Cal/Val methods applied at the above sites are based on comparison of altimetry-derived sea surface height (SSH) with ground-based measurements determined using in situ tide gauges, precise positioning, and/or Global Navigation Satellite System (GNSS) buoys [
24]. These techniques have worked well in along-track calibration of conventional nadir altimeters for more than 25 years [
5].
Since the 1970s, satellite altimetry technology has improved gradually in terms of both spatiotemporal resolution and accuracy. Resolution can be roughly classified into three evolution phases: the “diamond” (1970–1980s), “grid” (1990–2010), and “pixel” (2020s onward) resolution phases [
25]. In 2021, a new type of altimeter is scheduled for launch (e.g., in the surface water and ocean topography (SWOT) mission) that will be able to realize “pixel” resolution over wide swaths of approximately 120 km [
26,
27,
28]. Similarly, China’s new “Guanlan” science mission, designed with a dual-frequency (Ku-band and Ka-band) interferometric altimeter and an ocean lidar sensor, will advance oceanic remote sensing [
25]. Until now, existing Cal/Val technologies have all been designed to serve profile altimeters that measure the sea surface only at nadir points. However, conventional calibration methods with Cal/Val sites at a single fixed point cannot fully satisfy the needs for calibrating wide-swath interferometric altimeters. Consequently, calibration of SWOT-like missions requires new Cal/Val methods.
For the SWOT mission, an additional profile altimeter will provide effective Cal/Val of the Ka-band radar interferometer at wavelengths longer than 120 km [
26,
29,
30]. At wavelengths shorter than 120 km, an airborne radar interferometer (AirSWOT) using the same SWOT technology of wide-swath interferometry has been developed to measure the two-dimensional high-resolution SSH over the swath covered by the satellite [
31,
32]. However, proper operation of the AirSWOT still requires the support of in situ Cal/Val facilities such as GNSS buoys, gliders, and moorings [
26]. In addition to the AirSWOT, a novel observing system simulation experiment was performed for the calibration of SSH determined by a wide-swath interferometric altimeter [
33]. The SSH wavenumber spectrum was compared using simulated arrays of at least 20 station-kee** gliders or moorings under the wide-swath coverage. Then, the observing system simulation experiment was gradually improved by adding a multiscale data assimilation system [
34]. However, it should be noted that such operations would encounter practical difficulties when performed in the real ocean.
The Cal/Val activity for the Chinese Guanlan science mission also represents a challenging and demanding task. Comprehensive in situ Cal/Val arrays, including GNSS buoys, gliders, moorings, pressure-inverted echo sounders, and coastal tide gauges, will be integrated to fulfil the Cal/Val requirements of the Guanlan mission for simultaneous high-resolution SSH retrievals over 166-km-wide swaths [
25]. In addition to the Guanlan mission, an experimental interferometric altimeter sensor has already been deployed onboard the Tiangong-2 Space Laboratory, which collected high-resolution (40 m) SSH data in a swath approximately 20–40 km wide during 2016–2019 [
35]. However, reports on the Cal/Val of the Tiangong-2 interferometric altimeter are rare.
In this paper, we report on a Cal/Val experiment of an airborne interferometric radar altimeter system (AIRAS) designed as an engineering test prototype for the future Guanlan science mission. This experiment used in situ SSH data collected by GNSS buoys and other sources such as tide gauges, wave buoys, and weather stations that were provided by a national oceanic observation station in Qingdao. The advantage of GNSS buoy data over station data is that buoys can be deployed in target areas along the track of the airborne or satellite platforms, which is vital for the Cal/Val of high-resolution interferometric altimetry data. Previous studies have illustrated the possibility of using wavenumber comparisons in the space domain using by a network of station-kee** glider data to achieve such altimetry calibration [
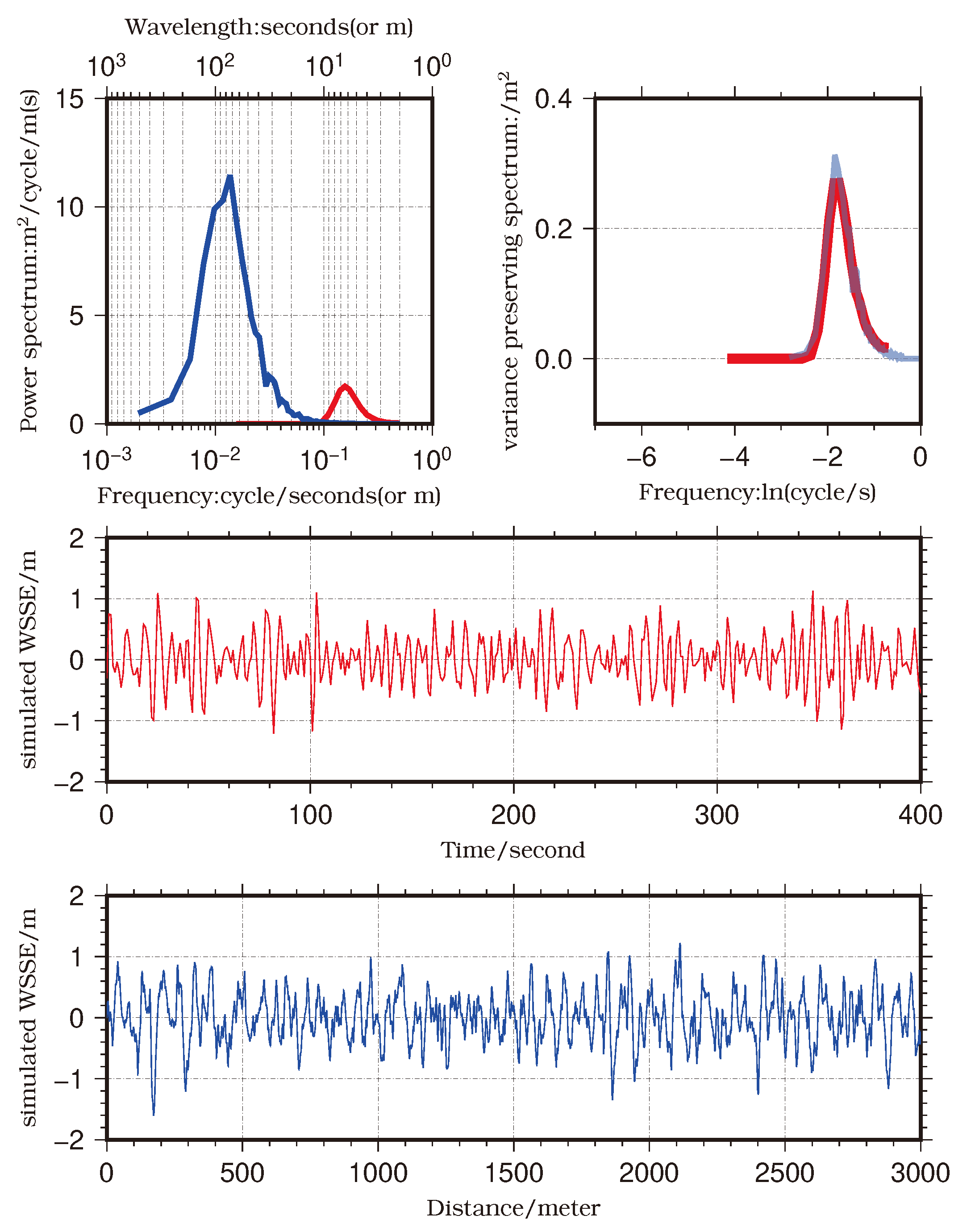
33]. However, there is still a critical question of how to calibrate the interferometric altimeter measurements in the space domain by GNSS or other buoy measurements which are in the time domain. To tackle this problem, we divided the Cal/Val of the AIRAS into two parts: the relative SSH difference between the two GNSS buoy locations and the wave-induced sea surface elevation (WSSE) directly above the GNSS buoy locations. For the WSSE, we deduced a mathematical transform that could unify the power spectral density from space and time domains, which makes this comparison and calibration possible. To illustrate the feasibility of the proposed method, a simulation of wind-generated sea surface elevation was tested using the Pierson–Moskowitz wave spectrum [
36]. For the relative SSH signal between the different locations of GNSS buoys, which is related primarily to the SSH difference caused by the geoid slope, we used a low-pass filter to remove part of the ocean wave signal in the GNSS buoy and AIRAS measurements. Then, the SSH difference observed by the AIRAS could be assessed using data from the GNSS buoys at two different locations.
Our research provides a solution to the problem of Cal/Val of airborne interferometric altimeters, which is a prerequisite step in the calibration of spaceborne interferometric altimeters [
26]. We also proved that the AIRAS could measure small-scale wind-induced gravity waves with high accuracy, in addition to the determination of relative SSH variation. This work was undertaken within the scope of the Cal/Val activities for the future Guanlan science mission.
2. Basic Description of the Validation Campaign
The main purpose of the airborne experiment was to verify the concept of interferometry. The flight height of the aircraft was set to 3000 m to maintain both a low noise level and a high signal-to-noise ratio. Therefore, the swath width was approximately only 1 km (determined by the flight height). Because the positioning accuracy of the aircraft and that of the GNSS buoys decreased with distance from the GNSS reference stations on land, the aircraft was flown at a maximum distance of 20 km from the coast and the in situ Cal/Val GNSS buoys were deployed within approximately 10 km. The water depth being only 25 m in this shallow sea, the SSH signals seen at this scale mainly reflect sea surface changes caused by ocean waves and wind setup effects (the submesoscale signals are relatively small). We chose to conduct Cal/Val by studying the wave field.
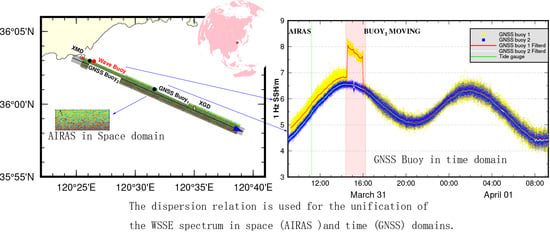
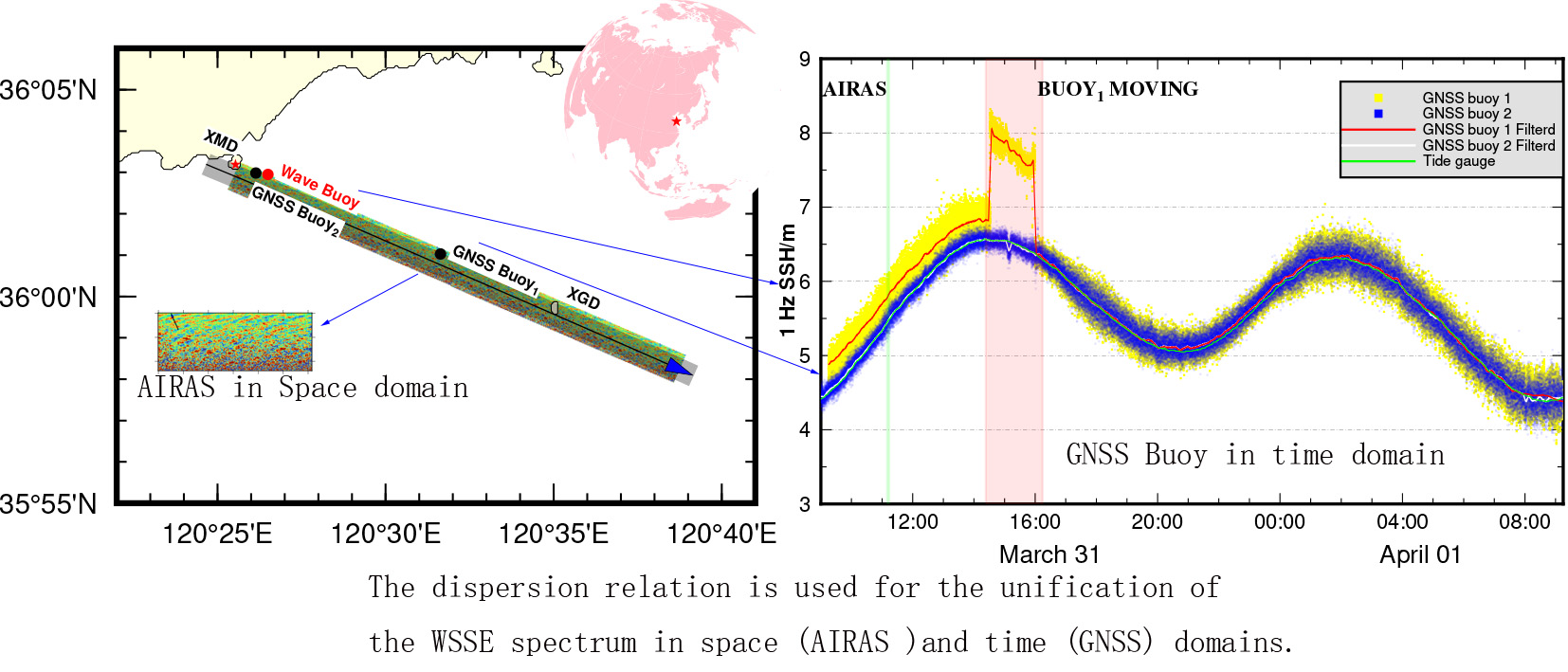
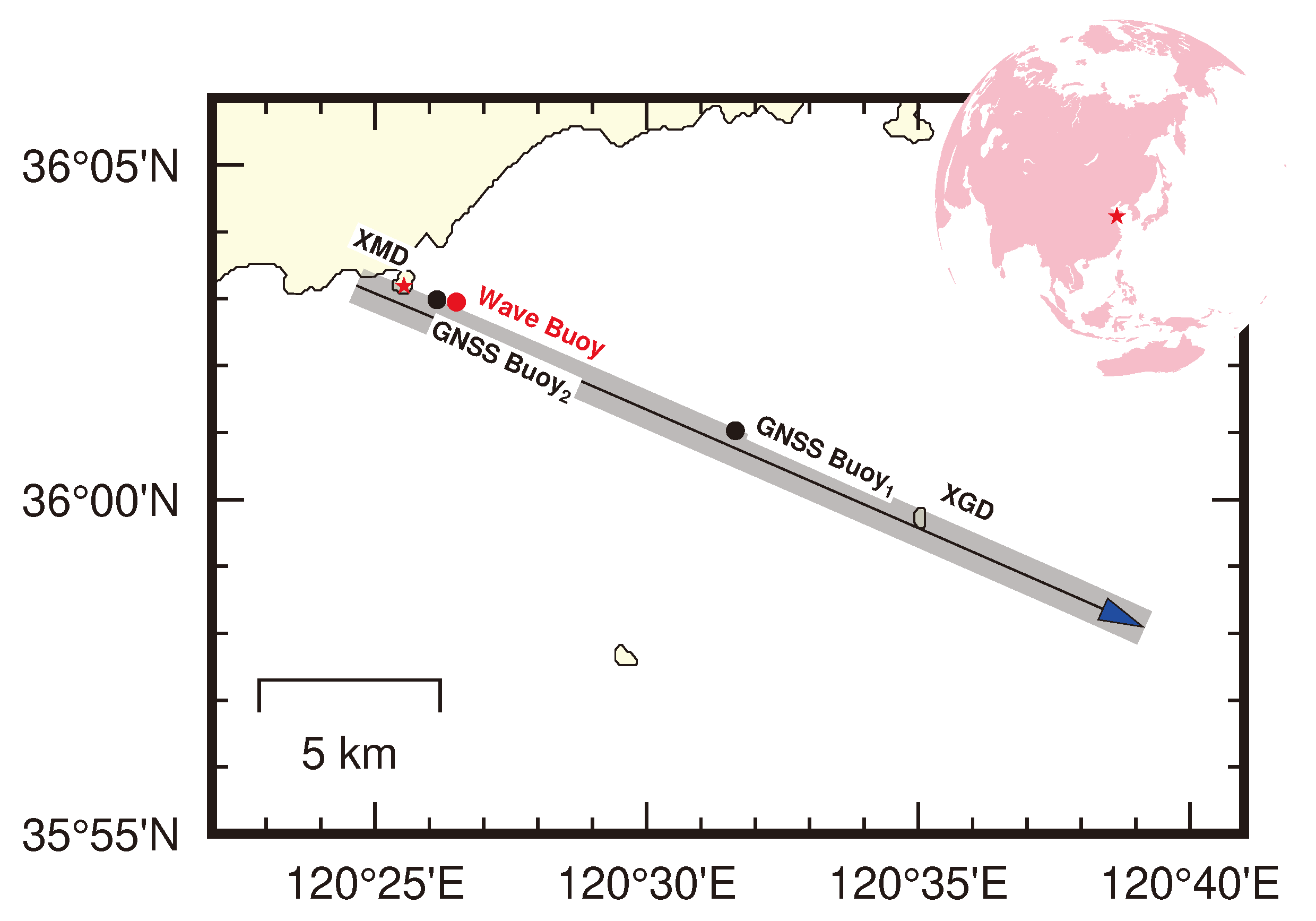
Figure 1 shows the area of the Yellow Sea off the coast of Qingdao chosen for the field test, and the location of a nearby national oceanic observation station (**aoMaiDao, XMD). This site was considered ideal for assessment of the AIRAS capacity to detect ocean dynamic signals of WSSE because it is a well-studied sea area populated with many oceanographic sensors operated by various institutes and national stations. It is also ideal for assessment of the capacity of the AIRAS to observe the SSH difference between different locations because the slope of the mean sea surface (MSS) within the area is approximately 3 cm/km (
Figure 2).
The airborne campaign took place on March 31, 2019. It was coordinated by both the Qingdao National Laboratory for Marine Science and Technology and the Ocean University of China. The Bei**g Institute of Radio Measurement designed the AIRAS hardware and modified one YUN-5 aircraft to carry the AIRAS instrument together with the airborne GNSS and inertial navigation system. The flight path of the aircraft is shown by the black line in
Figure 1. As can be seen, the plan was for the aircraft to pass over stations XMD and XGD (**aoGongDao) and to fly up to 20 km away from the coastline. Two GNSS reference stations were deployed at stations XMD and XGD to aid processing of the GNSS buoy and airborne GNSS data. The AIRAS aircraft position was determined using an airborne GNSS receiver operating at a sampling rate of 1 Hz, together with its inertial navigation system operating at 200 Hz. The AIRAS SSH data were collected over the XMD area, both on land and sea, at a flight height of 3000 m. Over the ocean, the SSH observations were collected with 0.3-m resolution, depending on flight height. The swath coverage (approximately 1-km width) of this airborne campaign is illustrated by the gray shading in
Figure 1.
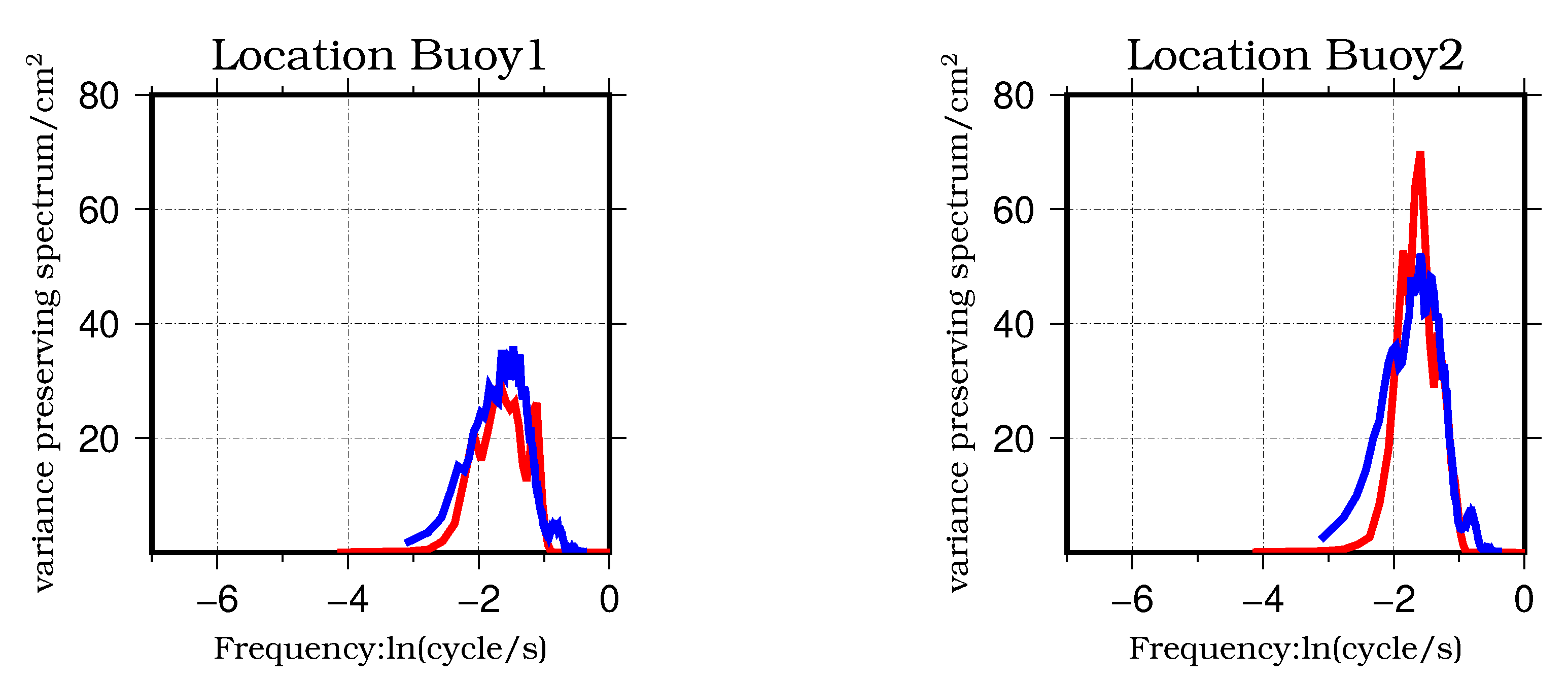
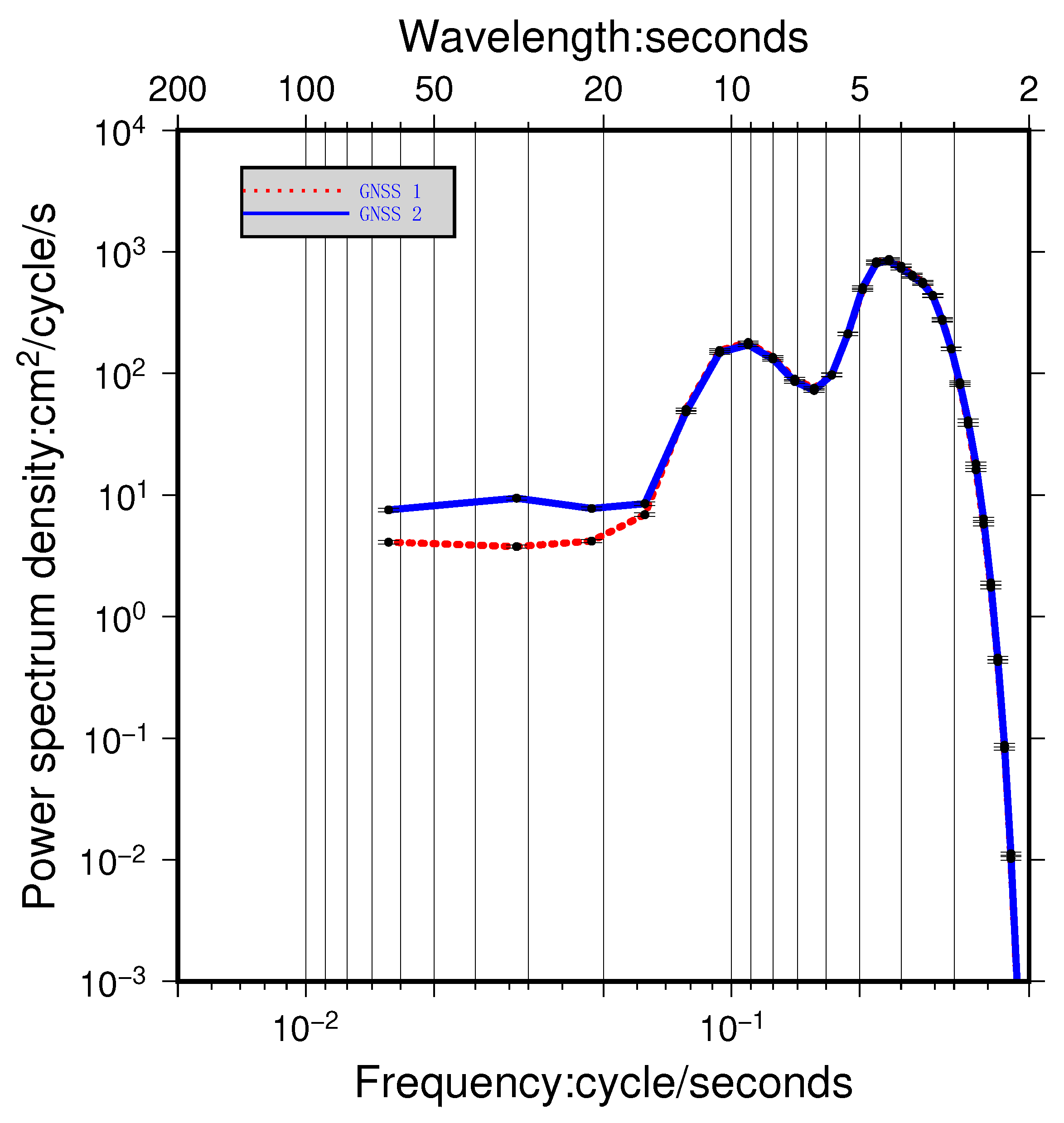
Two GNSS buoys, separated by a distance of 9 km, were deployed in the sea area of the AIRAS observation, which provided 1-Hz SSH data. After completion of the AIRAS campaign, GNSS buoy 1 was moved by ship to the location of buoy 2 to conduct cross validation of the buoys. In addition, tide gauge, wave buoy, and weather station data were also collected during this campaign. All these data helped with evaluation of the sea state conditions and provided suitable filters for the GNSS buoy measurements.
4. Methodology
In this campaign, the AIRAS measured sea surface elevation with horizontal resolution of 30 cm. With such high resolution, we were able to detect WSSE signals. Moreover, the along-track SSH difference could also be detected by the AIRAS. To evaluate the performance of the AIRAS, we consider the work in two parts: validation of the SSH difference and validation of the WSSE. In the former, the SSH difference arises largely from the MSS slope and thus it could be validated using GNSS buoy measurements at two different locations. For the latter, we propose a new method for evaluating interferometric altimeters that involves comparing the spectra of WSSE from the GNSS buoy and AIRAS measurements. This approach was tested through application of simulated WSSEs in the time and space domains using the Pierson–Moskowitz wave spectrum.
4.1. Validation of Sea Surface Height Difference
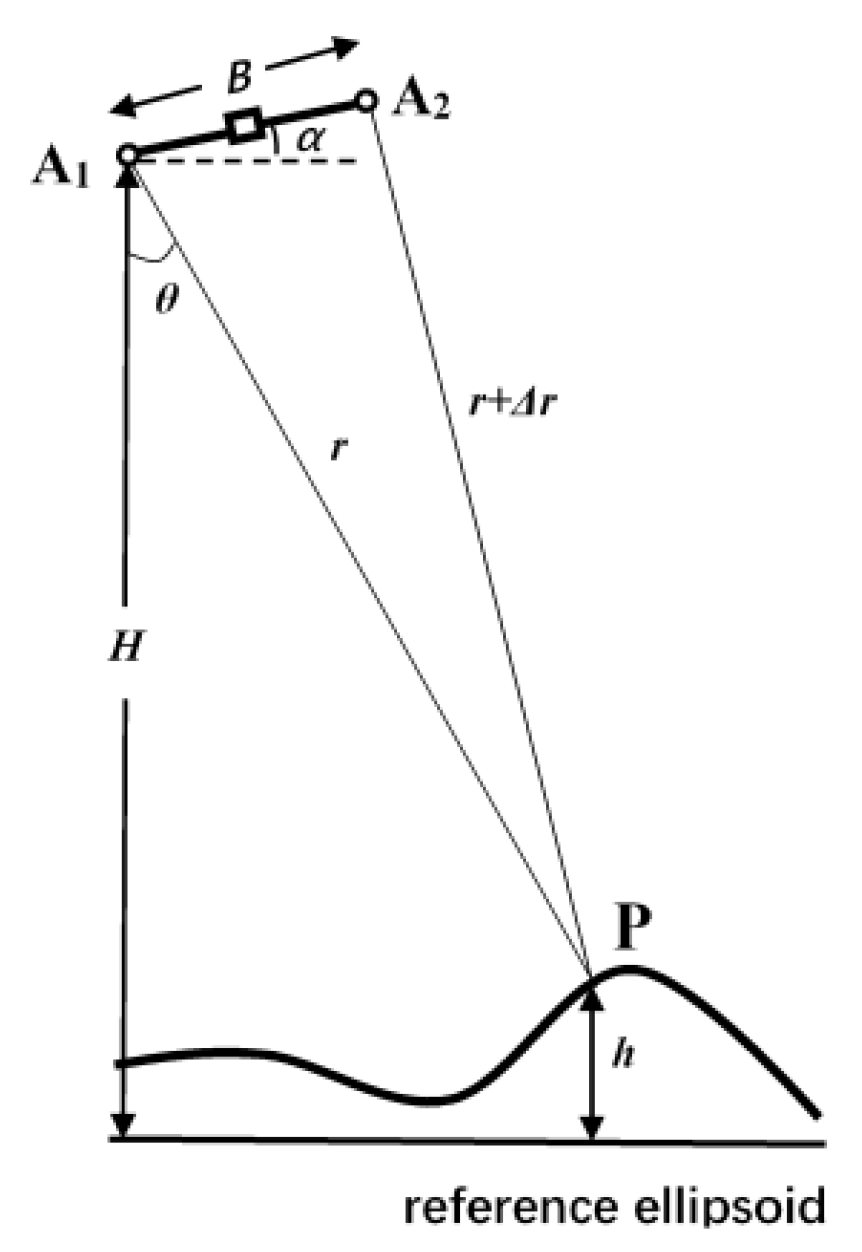
The AIRAS-measured SSH was referenced to the WGS-84 ellipsoid surface because of the GNSS used on the aircraft. To remove the WSSE signals, the low-pass-filtered SSHs from the AIRAS were averaged over an area of
m. The two GNSS buoys, deployed under the flight path and separated by a distance of 9 km, also measured the SSH with respect to the WGS-84 ellipsoid surface [
7,
43]. To remove the wave signals, a Butterworth low-pass filter was applied to the GNSS original SSHs with a cut-off period of 60 s. Thus, the SSH differences from the GNSS buoys were used to validate the SSHs derived from the AIRAS.
4.2. Validation of Wave-Induced Sea Surface Elevation
The WSSE is the dominant signal in the wavenumber or frequency domain of oceanic gravity waves [
38]. We propose a validation method based on the assumption that the WSSE variance of an equilibrium wave field is uniform and can be measured equivalently in the space or time domains [
44,
45,
46]. Specifically, for an equilibrium WSSE field, the following three statements can be made.
- (1)
If the time series of the measured sea surface elevation is sufficiently long, the variance of the sea surface elevation measured at any place within the domain is the same (i.e., no place is different).
- (2)
If the area of the measured sea surface elevation is sufficiently large, the variance of the sea surface elevation measured at any time within the domain is the same (i.e., no time is different).
- (3)
If statements (1) and (2) are true, the WSSE is a uniform field in space and time, and the variances of (1) and (2) are equal.
The power spectrum density (PSD) of the WSSE signal has been proven a useful indicator in the Cal/Val of interferometric altimeters owing to its relation to the dynamics of the ocean interior [
33]. The PSD can be used to estimate not only the WSSE variance but also the distributions of variance in wavenumber/frequency bands. In this investigation, we use the PSD to conduct the validation. The methods used for calculating the PSD and related settings are detailed in
Appendix A. Based on statements of (1)–(3), the sea surface elevation variances in the space and time domains could be expressed as the integral of the PSD over the wavenumber/frequency bands:
where
is the variance,
f and
k are the frequency and wavenumber in the time and space domains, respectively, and
S and
Q represent the power spectrum density in the time and space domains, respectively. Therefore, we could use the WSSE measured in the time domain by the GNSS buoys to validate the AIRAS in the space domain.
The variance distributions of the WSSE in the time and space domains could not be compared directly because they are expressed in different units and scales. To assess the consistency of the PSD shapes of the WSSE in the time/space domains, we first needed them to be unified. To show the fraction of variance in one band relative to other bands, the variance-preserving spectrum (VPS; the variance is not changed during the transform) could be calculated using the following mathematical transform based on Equation (
2) [
47]:
The dispersion relation of gravity waves in deep water is then used for the PSD conversion between the space domain and the time domain:
where
g is gravitational acceleration,
k is the wavenumber, and
f is the ocean wave frequency. Based on the theoretical dispersion relation (Equation (
4)) and the VPS (Equation (
3)), the relation between the VPS in terms of the frequency and the wavenumber domains could be expressed as (
Appendix B):
Finally, the variance as well as the variance (or power) distribution of the AIRAS WSSE could be validated using the GNSS buoys data. In this study, the variance was estimated using the integral of the PSD (or VPS) over the frequency/wavenumber domain, which neglects those signals outside the maximum and minimum bands of the frequency/wavenumber. For the measured WSSE from the GNSS data and the AIRAS, the difference between their unified VPSs arises mainly from measurement errors, and the integral of the difference of the two VPSs gives the total variance of the error in the wave frequency/wavenumber bands. Moreover, the difference in the VPS shapes could reflect the error of the power at different frequencies or wavenumbers. The correlation coefficient can be used to assess the consistency of the unified VPS shapes.
6. Conclusions and Discussion
The Cal/Val of interferometric altimeters is an essential, challenging, and compelling task because of the launches of the SWOT and Guanlan satellites planned for the near future. We proposed a Cal/Val method based on the assumption that the WSSE variance of an equilibrium wave field is uniform and that equivalent measurements can be made in the time or space domains. Here, we took advantage of the dispersion relation and linked the power spectrum density of the WSSE in the space domain to the time domain, which is much easier for in situ facilities to measure. Using simulated data, this approach was proven feasible. For the case study over a sea area off the coast of Qingdao (China), we applied the proposed method to the Cal/Val of the AIRAS airborne swath interferometric altimeter using GNSS buoy data.
Results indicate that the differences of the WSSE variances from the AIRAS and the two GNSS buoys were below 8 cm2, corresponding to a standard deviation of 2.8 cm. Therefore, it could serve as a reference for the WSSE error over the scale range of waves. The correlation coefficient between the AIRAS and GNSS buoys was approximately 0.90, indicating that the error was small relative to the WSSE signal. As for the difference in SSH measurements, our analysis showed that the AIRAS has satisfactory consistency with two GNSS buoys that were separated by a distance of 9 km, i.e., the difference was 3 cm. The bias of the AIRAS SSH could satisfy the expected uncertainty of 3.4 cm.
Our research is based on the statement that the WSSE variance of an equilibrium wave field is uniform and that it could be measured equivalently in the space or time domains. However, the spatial resolutions and coverages of the sensors of the SWOT and Guanlan satellite missions are markedly different to those of the airborne interferometric altimeter. Therefore, the applicability of the proposed approach to instruments onboard spaceborne platforms requires further investigation. Here, we mainly proved the feasibility of using GNSS buoys to assess airborne interferometric altimeter data. We also emphasize that our campaign was conducted under the conditions of a calm sea state in which the SWH was 20–30 cm. However, under different sea states, particularly in harsh conditions, the performance of the AIRAS will need further study. In addition, the main aim of interferometric radar altimeters is to measure the submesoscale ocean processes and the ocean wave is usually regarded as a error budget that could perturb the submesoscale signals, so the GNSS buoy and the AIRAS data may be useful for better estimating the SSH error budget owing to the wind-induced waves.
The results of this study represent the first evaluation of the ability of the AIRAS to measure two-dimensional WSSEs and SSH differences. The proposed Cal/Val method provides a perspective for future spaceborne or airborne interferometric altimeters. Our subsequent work will seek to verify the feasibility of this method by conducting additional experimentation under different sea conditions.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}