
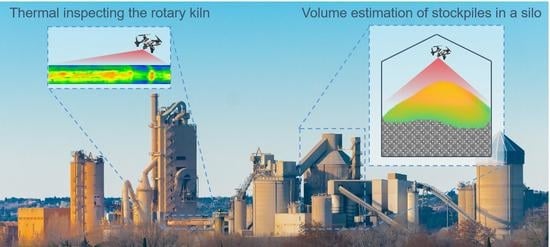
Drone-Assisted Confined Space Inspection and Stockpile Volume Estimation

 , , , and
, , , and
Abstract
:
1. Introduction
2. Research Background
2.1. Examples of Drone Missions in Confined Spaces
2.2. Challenges of Flying Drones in Confined Spaces
2.3. Commercial off-the-Shelf Indoor Inspection and Map** Drones
2.4. Outdoor Aerial Stockpile Volume Estimation
2.5. Dust Effects on LiDAR Sensors
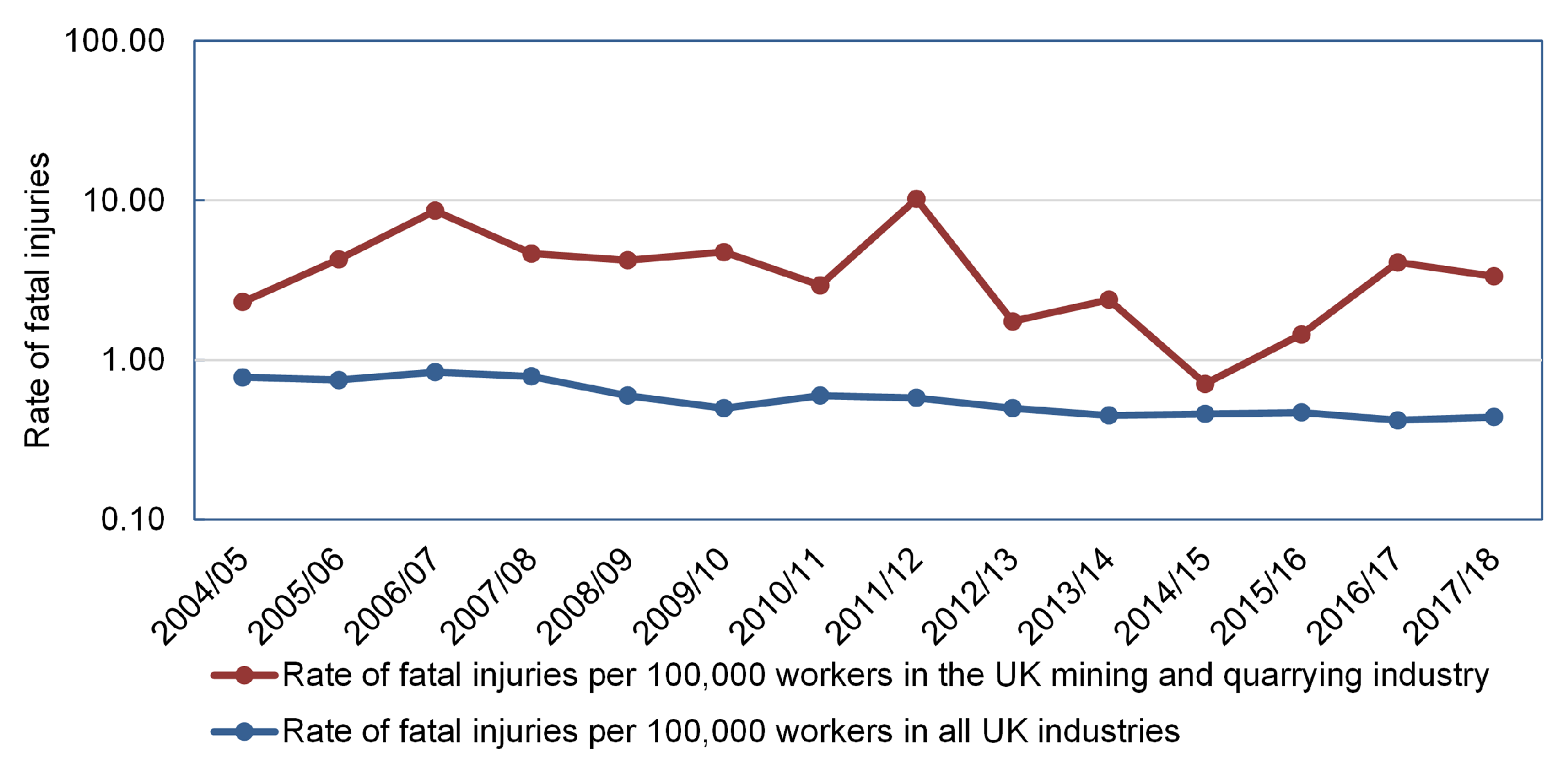
3. Current Health and Safety Challenges in Cement Plants
3.1. Overview
3.2. Revisiting Confined Space Safety Challenges

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Country/ Region | Period | Incidents | Fatalities | Fatality Rate per 100,000 Workers | Source |
|---|---|---|---|---|---|
| Australia | 2000–2012 | 45 | 59 | 0.05 | [65] |
| New Zealand | 2007–2012 | 4 | 6 | 0.05 | [54] |
| Singapore | 2007–2014 | N/A | 18 | 0.08 | [54] |
| Quebec, Canada | 1998–2011 | 31 | 41 | 0.07 | [50] |
| British Columbia, Canada | 2001–2010 | 8 | 17 | N/A | [54] |
| USA | 1980–1989 | 585 | 670 | 0.08 | [66] |
| USA | 1997–2001 | 458 | 0.07 | [67] | |
| USA | 1992–2005 | 431 | 530 | 0.03 | [68] |
| UK and Ireland | N/A | N/A | 15–25/year | 0.05 | [69,70] |
| Italy | 2001–2015 | 20 | 51 | N/A | [71] |
| Jamaica | 2005–2017 | 11 | 17 | N/A | [71] |
3.3. Indoor Stockpile Volume Estimation
3.4. Drones Safety Regulations
4. Proposed Drone-Assisted Solution for Stockpile Volume Estimation
4.1. Overview
4.2. Simulation Framework
4.2.1. Simulation Setup and Selection of Sensors
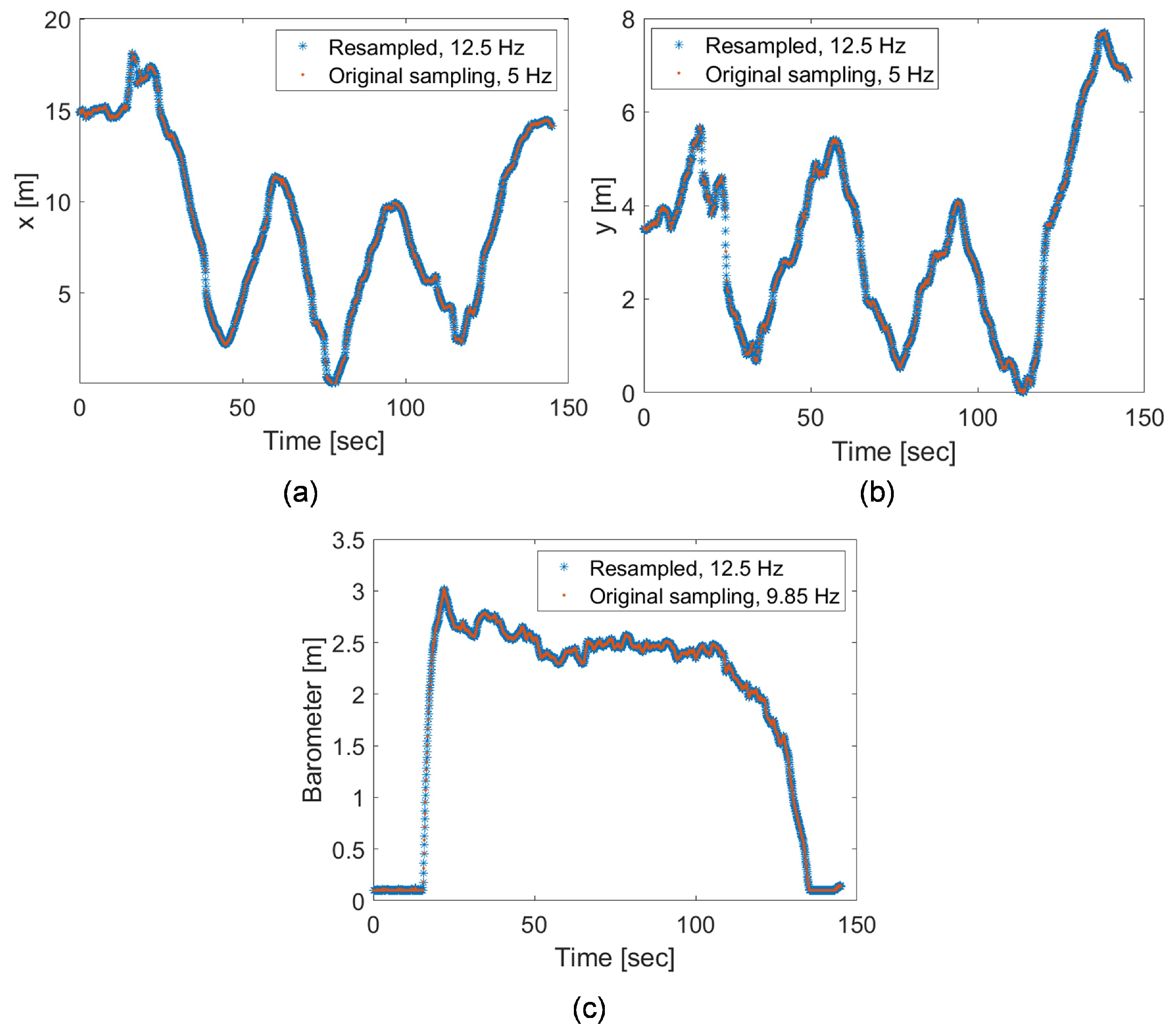
4.2.2. Indoor Localisation System
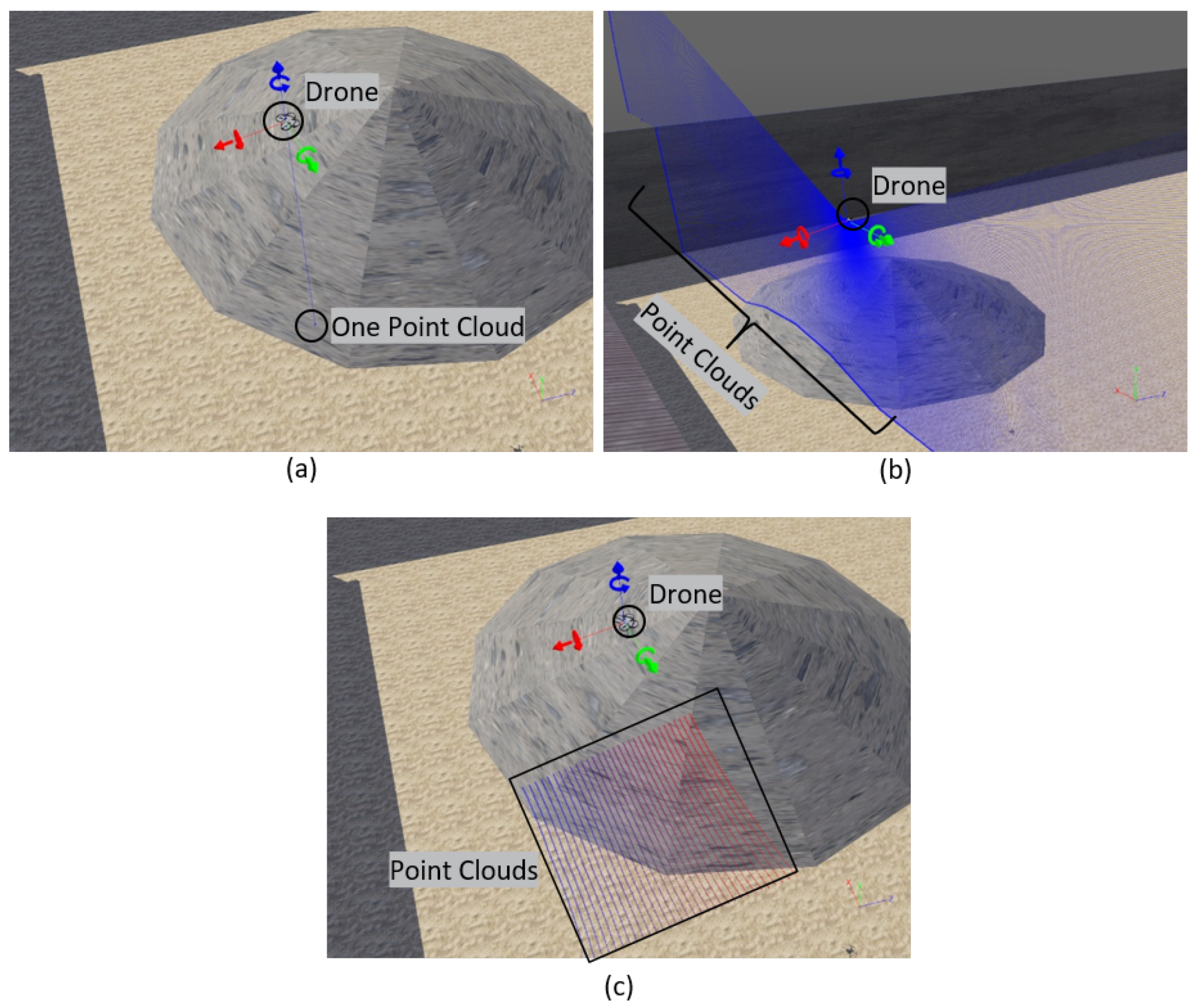
4.2.3. Locating and Filtering Point Clouds
4.2.4. Surface Generation
4.2.5. Mission Design
4.2.6. Simulation Results and Discussions
4.2.7. Stockpile Volume Estimation Using 3D Static Scanners
4.3. Industrial Case Study
4.3.1. Instrumentation
4.3.2. Data Collection and Processing
4.3.3. Results from Flight Tests
5. Cost-Benefit Analysis
6. Concluding Remarks and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Siebert, S.; Teizer, J. Mobile 3D map** for surveying earthwork projects using an Unmanned Aerial Vehicle (UAV) system. Autom. Constr. 2014, 41, 1–14. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Liu, D.; Chen, J.; Hu, D.; Zhang, Z. Dynamic BIM–augmented UAV safety inspection for water diversion project. Comput. Ind. 2019, 108, 163–177. [Google Scholar] [CrossRef]
- Miranda, J.; Ponce, P.; Molina, A.; Wright, P. Sensing, smart and sustainable technologies for Agri-Food 4.0. Comput. Ind. 2019, 108, 21–36. [Google Scholar] [CrossRef]
- Nabawy, M.R.A.; ElNomrossy, M.M.; Abdelrahman, M.M.; ElBayoumi, G.M. Aerodynamic shape optimisation, wind tunnel measurements and CFD analysis of a MAV wing. Aeronaut. J. 2012, 116, 685–708. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, M.R.; Abdelrahman, M.M.; ElBayoumi, G.M.; ElNomrossy, M.M. Optimal wing twist distribution for roll control of MAVs. Aeronaut. J. 2011, 115, 641–649. [Google Scholar] [CrossRef]
- Shearwood, T.R.; Nabawy, M.R.A.; Crowther, W.J.; Warsop, C. A Novel Control Allocation Method for Yaw Control of Tailless Aircraft. Aerospace 2020, 7, 150. [Google Scholar] [CrossRef]
- Shearwood, T.R.; Nabawy, M.R.; Crowther, W.; Warsop, C. A Control Allocation Method to Reduce Roll-Yaw coupling on Tailless Aircraft. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 11–15, 19–21 January 2021. [Google Scholar] [CrossRef]
- Health and Safety Statistics. Available online: https://www.hse.gov.uk/statistics (accessed on 12 July 2020).
- SAFTENG. Available online: http://www.safteng.net (accessed on 1 June 2020).
- Kas, K.A.; Johnson, G.K. Using unmanned aerial vehicles and robotics in hazardous locations safely. Process. Saf. Prog. 2020, 39, 1–13. [Google Scholar] [CrossRef]
- Esfahlani, S.S. Mixed reality and remote sensing application of unmanned aerial vehicle in fire and smoke detection. J. Ind. Inf. Integr. 2019, 15, 42–49. [Google Scholar] [CrossRef]
- Anderson, M.J.; Sullivan, J.G.; Talley, J.L.; Brink, K.M.; Fuller, S.B.; Daniel, T.L. The “Smellicopter,” a bio-hybrid odor localizing nano air vehicle. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macao, China, 3–8 November 2019; pp. 6077–6082. [Google Scholar]
- Lee, S.; Har, D.; Kum, D. Drone-assisted disaster management: Finding victims via infrared camera and lidar sensor fusion. In Proceedings of the 2016 3rd IEEE Asia-Pacific World Congress on Computer Science and Engineering (APWC on CSE), Nadi, Fiji, 4–6 December 2016; pp. 84–89. [Google Scholar]
- Burgués, J.; Hernández, V.; Lilienthal, A.; Marco, S. Smelling Nano Aerial Vehicle for Gas Source Localization and Map**. Sensors 2019, 19, 478. [Google Scholar] [CrossRef] [Green Version]
- Turner, R.M.; MacLaughlin, M.M.; Iverson, S.R. Identifying and map** potentially adverse discontinuities in underground excavations using thermal and multispectral UAV imagery. Eng. Geol. 2020, 266, 105470. [Google Scholar] [CrossRef]
- Papachristos, C.; Khattak, S.; Mascarich, F.; Dang, T.; Alexis, K. Autonomous Aerial Robotic Exploration of Subterranean Environments relying on Morphology–aware Path Planning. In Proceedings of the 2019 IEEE International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 299–305. [Google Scholar]
- Castaño, A.R.; Romero, H.; Capitán, J.; Andrade, J.L.; Ollero, A. Development of a Semi-autonomous Aerial Vehicle for Sewerage Inspection. In Robot 2019: Fourth Iberian Robotics Conference; Silva, M.F., Luís Lima, J., Reis, L.P., Sanfeliu, A., Tardioli, D., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 75–86. [Google Scholar]
- Ajay Kumar, G.; Patil, A.K.; Patil, R.; Park, S.S.; Chai, Y.H. A LiDAR and IMU Integrated Indoor Navigation System for UAVs and Its Application in Real-Time Pipeline Classification. Sensors 2017, 17, 1268. [Google Scholar] [CrossRef] [Green Version]
- Cook, Z.; Kazemeini, M.; Barzilov, A.; Yim, W. Low-altitude contour map** of radiation fields using UAS swarm. Intell. Serv. Robot. 2019, 12, 219–230. [Google Scholar] [CrossRef]
- Hennage, D.H.; Nopola, J.R.; Haugen, B.D. Fully autonomous drone for underground use. In Proceedings of the 53rd U.S. Rock Mechanics/Geomechanics Symposium. American Rock Mechanics Association, New York, NY, USA, 23–26 June 2019. [Google Scholar]
- De Croon, G.; De Wagter, C. Challenges of Autonomous Flight in Indoor Environments. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1003–1009. [Google Scholar]
- Dissanayake, M.; Newman, P.; Clark, S.; Durrant-Whyte, H.; Csorba, M. A solution to the simultaneous localization and map building (SLAM) problem. IEEE Trans. Robot. Autom. 2001, 17, 229–241. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Zhao, J.; Liu, J. A Survey of Simultaneous Localization and Map**. ar**&author=Huang,+B.&author=Zhao,+J.&author=Liu,+J.&publication_year=2019&journal=ar** Countries; Routledge: London, UK, 2019; pp. 205–217. [Google Scholar]
- The Confined Spaces Regulations 1997, No. 1713. Available online: http://www.legislation.gov.uk/uksi/1997/1713/contents/made (accessed on 9 May 2020).
- The Management of Health and Safety at Work Regulations 1999 No. 3242. Available online: http://www.legislation.gov.uk/uksi/1999/3242/contents/made (accessed on 11 May 2020).
- Pathak, A. Occupational Health & Safety in Cement industries. Int. J. Inst. Saf. Eng. India (IJISEI) 2019, 2, 8–20. [Google Scholar]
- Rotatori, M.; Mosca, S.; Guerriero, E.; Febo, A.; Giusto, M.; Montagnoli, M.; Bianchini, M.; Ferrero, R. Emission of submicron aerosol particles in cement kilns: Total concentration and size distribution. J. Air Waste Manag. Assoc. 2015, 65, 41–49. [Google Scholar] [CrossRef] [Green Version]
- Meo, S.A. Health hazards of cement dust. Saudi Med. J. 2004, 25, 1153–1159. [Google Scholar]
- Selman, J.; Spickett, J.; Jansz, J.; Mullins, B. Work-related traumatic fatal injuries involving confined spaces in Australia, 2000–2012. J. Health Saf. Environ. 2017, 33, 197–215. [Google Scholar]
- Pettit, T.A.; Braddee, R.W.; Suruda, A.J.; Castillo, D.N.; Helmkamp, J.C. Workers deaths in confined spaces. Prof. Saf. 1996, 41, 22. [Google Scholar]
- Meyer, S. Fatal Occupational Injuries Involving Confined Spaces, 1997–2001. Occup. Health Saf. 2003, 72, 58–64. [Google Scholar] [PubMed]
- Wilson, M.P.; Madison, H.N.; Healy, S.B. Confined Space Emergency Response: Assessing Employer and Fire Department Practices. J. Occup. Environ. Hyg. 2012, 9, 120–128. [Google Scholar] [CrossRef] [PubMed]
- Confined Spaces Are “Silent Killers”—Marine Safety Alert Issued by the Coast Guard. Available online: https://uk-ports.org/confined-spaces-silent-killers-marine-safety-alert-issued-coast-guard (accessed on 4 June 2021).
- Confined Spaces “The Horror Stories”. Available online: http://www.tbsrs.co.uk/recent-incidents-confined-space-rescue-deaths (accessed on 4 June 2021).
- Botti, L.; Duraccio, V.; Gnoni, M.G.; Mora, C. A framework for preventing and managing risks in confined spaces through IOT technologies. In Safety and Reliability of Complex Engineered Systems, Proceedings of the 25th European Safety and Reliability Conference, ESREL, Zurich, Switzerland, 7–10 September 2015; Taylor & Francis Group: Abingdon, UK, 2015; pp. 3209–3217. [Google Scholar]
- Stockpile Measurement Methods. 2019. Available online: https://www.stockpilereports.com/stockpile-measurement-methods-that-work (accessed on 4 June 2021).
- Cracknell, A.P. UAVs: Regulations and law enforcement. Int. J. Remote Sens. 2017, 38, 3054–3067. [Google Scholar] [CrossRef]
- Khan, M.A.; Safi, A.; Alvi, B.A.; Khan, I.U. Drones for good in smart cities: A review. In Proceedings of the International Conference on Electrical, Electronics, Computers, Communication, Mechanical and Computing (EECCMC), Vaniyambadi, India, 28–29 January 2018; pp. 1–6. [Google Scholar]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef] [Green Version]
- Liao, X.; Zhang, Y.; Su, F.; Yue, H.; Ding, Z.; Liu, J. UAVs surpassing satellites and aircraft in remote sensing over China. Int. J. Remote Sens. 2018, 39, 7138–7153. [Google Scholar] [CrossRef]
- Regulations Relating to the Commercial Use of Small Drones. Available online: https://www.caa.co.uk/Consumers/Unmanned-aircraft/Recreational-drones/Flying-in-the-open-category/ (accessed on 8 June 2021).
- Atkinson, D. Drone Safety. 2017. Available online: https://www.heliguy.com/blog/2017/09/28/drone-safety (accessed on 1 May 2020).
- Chen, X.; Huang, J. Combining particle filter algorithm with bio-inspired anemotaxis behavior: A smoke plume tracking method and its robotic experiment validation. Meas. J. Int. Meas. Confed. 2020, 154, 107482. [Google Scholar] [CrossRef]
- Wen, S.; Han, J.; Ning, Z.; Lan, Y.; Yin, X.; Zhang, J.; Ge, Y. Numerical analysis and validation of spray distributions disturbed by quad-rotor drone wake at different flight speeds. Comput. Electron. Agric. 2019, 166, 105036. [Google Scholar] [CrossRef]
- Hagele, G.; Sarkheyli-Hagele, A. Situational risk assessment within safety-driven behavior management in the context of UAS. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems, ICUAS, Athens, Greece, 12–15 June 2020; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2020; pp. 1407–1415. [Google Scholar]
- Michel, O. Cyberbotics Ltd. Webots™: Professional Mobile Robot Simulation. Int. J. Adv. Robot. Syst. 2004, 1, 5. [Google Scholar] [CrossRef] [Green Version]
- RoboSense RS-LiDAR-16 3D Laser Range Finder. Available online: https://www.generationrobots.com/en/403308-robosense-rs-lidar-16-laser-range-finder.html?SubmitCurrency=1&id_currency=3 (accessed on 12 January 2021).
- RoboSense RS-LiDAR-32 3D Laser Range Finder. Available online: https://www.generationrobots.com/en/403307-robosense-rs-lidar-32-laser-range-finder.html?SubmitCurrency=1&id_currency=3 (accessed on 12 January 2021).
- Wang, R.; Xu, Y.; Sotelo, M.A.; Ma, Y.; Sarkodie-Gyan, T.; Li, Z.; Li, W. A robust registration method for autonomous driving pose estimation in urban dynamic environment using LiDAR. Electronics 2019, 8, 43. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Pei, H. The Solution of Drone Attitudes on Lie Groups. In Proceedings of the 2020 5th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Shenzhen, China, 18–21 December 2020; pp. 276–281. [Google Scholar]
- Turgut, A.E.; Çelikkanat, H.; Gökçe, F.; Şahin, E. Self-organized flocking in mobile robot swarms. Swarm Intell. 2008, 2, 97–120. [Google Scholar] [CrossRef]
- TFmini Infrared Module Specification. Available online: https://cdn.sparkfun.com/assets/5/e/4/7/b/benewake-tfmini-datasheet.pdf (accessed on 2 July 2021).
- Distance Data Output/UTM-30LX. Available online: https://www.hokuyo-aut.jp/search/single.php?serial=169 (accessed on 2 July 2021).
- Scanse Sweep 360 Degree Scanning LIDAR. Available online: https://coolcomponents.co.uk/products/scanse-sweep-360-degree-scanning-lidar (accessed on 2 July 2021).
- Livox Mid-40 LiDAR Sensor. Available online: https://www.livoxtech.com/mid-40-and-mid-100/specs (accessed on 2 July 2021).
- 3DLevelScanner. Available online: https://www.binmaster.com/products/product/3dlevelscanner (accessed on 4 July 2021).
- Convert MATLAB Datetime to POSIX Time—MATLAB Posixtime—MathWorks United Kingdom. Available online: https://uk.mathworks.com/help/matlab/ref/datetime.posixtime.html (accessed on 30 November 2020).
- Von Laven, K. Spherical to Azimuthal Equidistant. Available online: https://uk.mathworks.com/matlabcentral/fileexchange/28848-spherical-to-azimuthal-equidistant (accessed on 30 November 2020).
- Mohamed, A.S.; Doma, M.I.; Rabah, M.M. Study the Effect of Surrounding Surface Material Types on the Multipath of GPS Signal and Its Impact on the Accuracy of Positioning Determination. Am. J. Geogr. Inf. Syst. 2019, 8, 199–205. [Google Scholar]
- 30 Cubic Meters Tipper Dump Trailers for Coal Sand Transport TITAN. Available online: http://m.semilowbedtrailer.com/sale-7708589d-30-cubic-meters-tipper-dump-trailers-for-coal-sand-transport-titan.html (accessed on 14 August 2020).
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2020, 21, 226–243. [Google Scholar] [CrossRef]






















| Study | Mission | Drone Configuration and Diagonal Size | Sensor Employed | Localisation Approach |
|---|---|---|---|---|
| [12] | Building a 3D map of gas distribution | Crazyflie 2.0 (92 mm) | Metal oxide (MOX) gas sensor | External UWB radio transmitters |
| [13] | Indoor map** and localisation | Phantom 3 Advanced Quadcopter (350 mm) | Two 2D LiDARs and an IMU | Point-to-point scan matching algorithm and Kalman filter |
| [14] | Searching for survivors in collapsed buildings or underground areas | DJI Matrice 100 (650 mm) | 2D LiDAR and infrared depth camera | RVIZ package within ROS |
| [15] | Inspecting sewer systems | DJI F450 (450 mm) | Four 1D LiDARs and a camera | Two PID controls |
| [16] | Odour-finding and localisation | Crazyflie 2.0 (92 mm) | Electroantennogram (EAG), camera, and IR | 2D cast-and-surge algorithm |
| [17] | Detecting fire and smoke | Crazyflie 2.0 (92 mm) | IMU and camera | SLAM and pose-graph optimization algorithms |
| [18] | Radiation source localisation and map** | Three DJI F450 (450 mm) | Kromek cadmium zinc telluride (CZT) detector | Contour map** algorithm and source seeking |
| [19] | Map** and inspection of underground mines | DJI Wind 2 (805 mm) | RGB, multispectral and thermal cameras, and 3D LiDAR | Emesent Hovermap device |
| [20] | Map** underground mines | DJI Matrice 100 (650 mm) | 3D LiDAR, a mono camera, and a high-performance IMU | LiDAR Odometry And Map** and Robust Visual Inertial Odometry |
| Stereo camera, thermal vision camera, and a high-performance IMU | Robust Visual Inertial Odometry | |||
| [21] | Fully autonomous flight in underground mines | DJI M210 (643 mm) | Ultrasonic range sensor and stereo camera | Visual Odometry |
| LiDAR | Benewake TFmini | Hokuyo UTM-30LX | Livox Mid-40 |
|---|---|---|---|
| (1D) | (2D) | (3D) | |
| FoV | |||
| Range (m) | 0.3–12 | 0.1–30 | 260 |
| Resolution (point) | 1 | 1080 | ≈3200 |
| Point Rate (points/s) | 100 | 43,200 | 100,000 |
| Power Consumption (W) | 0.12 | 8 | 10 |
| Weight (gm) | 10 | 370 | 710 |
| Price (£) | 33 | 4169 | 539 |
| Missions | Details | Benewake TFmini(1D LiDAR) (FoV: 2.3) | Hokuyo UTM-30LX (2D LiDAR) (FoV: 270) | Livox Mid-40 (3D LiDAR) (FoV: 38.4) |
|---|---|---|---|---|
| Open area | Generated surface | Figure 10b | Figure 10d | Figure 10f |
| Flight time (min) | 8.36 | 8.36 | 8.36 | |
| Number of collected point clouds | 15,366 | 16,595,280 | 49,171,200 | |
| Estimated volume (m) | 3224.6 | 3131.3 | 3076.8 | |
| Error (%) | +3.06 | +0.07 | −1.67 | |
| Fully confined storage | Generated surface | Figure 11b | Figure 11d | Figure 11f |
| Flight time (min) | 5.55 | 5.55 | 5.55 | |
| Number of collected point clouds | 10,260 | 11,080,800 | 32,832,000 | |
| Estimated volume (m) | 2838.3 | 3101.3 | 3130.7 | |
| Error (%) | −9.36% | −0.83% | +1.66% |
| Details | Benewake TFmini | Hokuyo UTM-30LX | Livox Mid-40 |
|---|---|---|---|
| (1D LiDAR) | (2D LiDAR) | (3D LiDAR) | |
| Generated surface | Figure 15b | Figure 15d | Figure 15f |
| Flight time (min) | 5.55 | 5.55 | 5.55 |
| Number of collected point clouds | 9952 | 10,855,080 | 32,163,200 |
| Estimated volume (m) | 2876.3 | 3812.6 | 3486.4 |
| Error (%) | −25.8 | −2.41 | −9.84 |
| Noise | 1D LiDAR | 2D LiDAR | 3D LiDAR | |
|---|---|---|---|---|
| Outdoor | Excluded | +3.06% | +0.07% | −1.67% |
| Figure 8a | Included | +3.06% | +0.22% | −1.36% |
| Indoor 1st stockpile | Excluded | −9.36% | −0.83% | +1.66% |
| Figure 8b | Included | −9.25% | +0.59% | +2.15% |
| Indoor 2rd stockpile | Excluded | −25.8% | −2.41% | −9.84% |
| Figure 14 | Included | −25.3% | −1.94% | −9.06% |
| Drone-Assisted Map** | 3D Static | |||
|---|---|---|---|---|
| 1D LiDAR | 2D LiDAR | 3D LiDAR | Scanners | |
| Indoor 1st stockpile (Figure 8b) | −9.36% | −0.83% | +1.66% | +0.21% |
| Indoor 2rd stockpile (Figure 14) | −25.8% | −2.41% | −9.84% | −7.6% (+0.59% *) |
| Cost Element | Sub-Element | Quantity | Approximate Cost (£) | |
|---|---|---|---|---|
| Unit | Total | |||
| Man-hours | Planning | 1 | 8 h @ £25 per hour | 200 |
| Mission | 2 | 2 × 8 h @ £25 per hour | 400 | |
| Data analysis | 1 | 8 h @ £25 per hour | 200 | |
| Personal protective equipment (PPE) | Dust masks (99.99% filtration accuracy) | 2 | 20 | 40 |
| Safety goggles | 2 | 9 | 18 | |
| Safety boots | 2 | 30 | 60 | |
| High visibility overalls | 2 | 40 | 80 | |
| Safety gloves | 2 | 3 | 6 | |
| Ear protectors | 2 | 3 | 6 | |
| Hard hats (helmets) | 2 | 6 | 12 | |
| Transportation | Train | 2 | 15 | 30 |
| Taxi | 2 | 35 | 70 | |
| Instrumentation | Drone (1D LiDAR approach) | 1 | 1000 | 1000 |
| Spares and tools | 1 set | 150 | 150 | |
| Laptops | 2 | 750 | 1500 | |
| Annual drone insurance [97] | 1 | 180 | 180 | |
| Annual CAA fees | 1 | 750 | 750 | |
| Miscellaneous | Refreshment and stationery | 2 | 25 | 50 |
| Total (£) | 4752 | |||
| Study | Mission | Task Frequency | Average Size of Manpower at Risk | Environmental Complexity | Accuracy Level | Impact of Task on Operation | Approximate Cost | Cost-Benefit Priority Factor |
|---|---|---|---|---|---|---|---|---|
| [12] | Building a 3D map of gas distribution | 1 | 5 | 1–2 | 2 | 3–4 | 5 | 5–13.3 |
| [13] | Indoor map** and localisation solution | 1 | 1 | 1–3 | 5 | 1 | 2–3 | 0.33–1.5 |
| [14] | Searching for survivors in collapsed buildings or underground areas | 2 | 5 | 5 | - | 4 | 4 | - |
| [15] | Inspecting sewer systems | 2 | 2–3 | 4–5 | 4 | 2 | 5 | 21–40 |
| [16] | Odour-finding and localisation | 2 | 1–2 | 3–5 | 2 | 3 | 5 | 6–20 |
| [17] | Detecting fire and smoke | 3 | 1–2 | 3–5 | 5 | 5 | 5 | 37.5–125 |
| [18] | Localisation and map** a radiation source | 1 | 5 | 5 | 4 | 5 | 2–3 | 33.3–50 |
| [19] | Map** and inspection of underground mines | 3 | 5 | 5 | 5 | 4 | 1 | 50 |
| [20] | Map** underground mines | 3 | 5 | 5 | 5 | 4 | 2 | 100 |
| [21] | Fully autonomous flight in underground mines | 1 | 5 | 5 | 5 | 4 | 2–3 | 33.3–50 |
| Current study | Confined space inspection and stockpile estimation | 4 | 5 | 5 | 5 | 4 | 5 | 333 |
| Ranking | Task Frequency | Average Size of Manpower at Risk | Environmental Complexity | Accuracy Level | Impact of Task on Operation | Approximate Cost |
|---|---|---|---|---|---|---|
| 5 | Very high (hourly-daily) | Very high (>5 employees) | Extremely harsh (e.g., extremely high hazard due to dust-laden air, high temperatures, high humidity, poor visibility, poor communication signals, confined space, uneven surfaces, etc.) | Very high (0–5% error levels) | Major (operation stops) | ≤£1000 |
| 4 | High (weekly-monthly) | High (3–5 employees) | Harsh (e.g., significant hazard levels) | High (>5–10% error levels) | Significant (significant impacts on quality, stock balance, working capital, safety, etc.) | £1000–£3000 |
| 3 | Moderately (3–6 monthly) | Moderate (2–3 employees) | Moderately (moderate hazard levels) | Moderate (>10–15% error levels) | Important (important but less significant impacts on quality, stock balance, working capital, safety, etc.) | >£3000–£5000 |
| 2 | Rarely (yearly) | Low (1 employee) | Friendly (friendly work environment with insignificant hazard levels) | Low (>15–20% error levels) | Minor (minor impacts on quality, stock balance, working capital, safety, etc.) | >£5000–£10,000 |
| 1 | Very rarely (>yearly) | Very low (completely autonomous) | Extremely friendly (very friendly work environment with very insignificant hazard levels) | very low (>20% error levels) | Very minor (very minor impacts on quality, stock balance, working capital, safety, etc.) | >£10,000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsayed, A.; Yunusa-Kaltungo, A.; Quinn, M.K.; Arvin, F.; Nabawy, M.R.A. Drone-Assisted Confined Space Inspection and Stockpile Volume Estimation. Remote Sens. 2021, 13, 3356. https://doi.org/10.3390/rs13173356
Alsayed A, Yunusa-Kaltungo A, Quinn MK, Arvin F, Nabawy MRA. Drone-Assisted Confined Space Inspection and Stockpile Volume Estimation. Remote Sensing. 2021; 13(17):3356. https://doi.org/10.3390/rs13173356
Chicago/Turabian StyleAlsayed, Ahmad, Akilu Yunusa-Kaltungo, Mark K. Quinn, Farshad Arvin, and Mostafa R. A. Nabawy. 2021. "Drone-Assisted Confined Space Inspection and Stockpile Volume Estimation" Remote Sensing 13, no. 17: 3356. https://doi.org/10.3390/rs13173356