
Design, Manufacturing, and Open-Loop Control of a Soft Pneumatic Arm

Abstract
:1. Introduction
2. Related Works
2.1. Pneumatic Actuation
2.2. Pneumatic Arms
2.3. Control of Soft Robots
3. PAUL: Design and Manufacturing
3.1. Robot Design
- The resulting robot must consist of three independently actuated segments, each with three degrees of freedom.
- The actuation of the segments that make up the robot must be pneumatic.
- The segments must be made of flexible silicone.
- These segments must allow easy assembly and disassembly as well as a modular design.
- The pneumatic tubes must be completely embedded in the body of the robot to avoid breakage and to allow more complex movements.
3.2. Material Selection
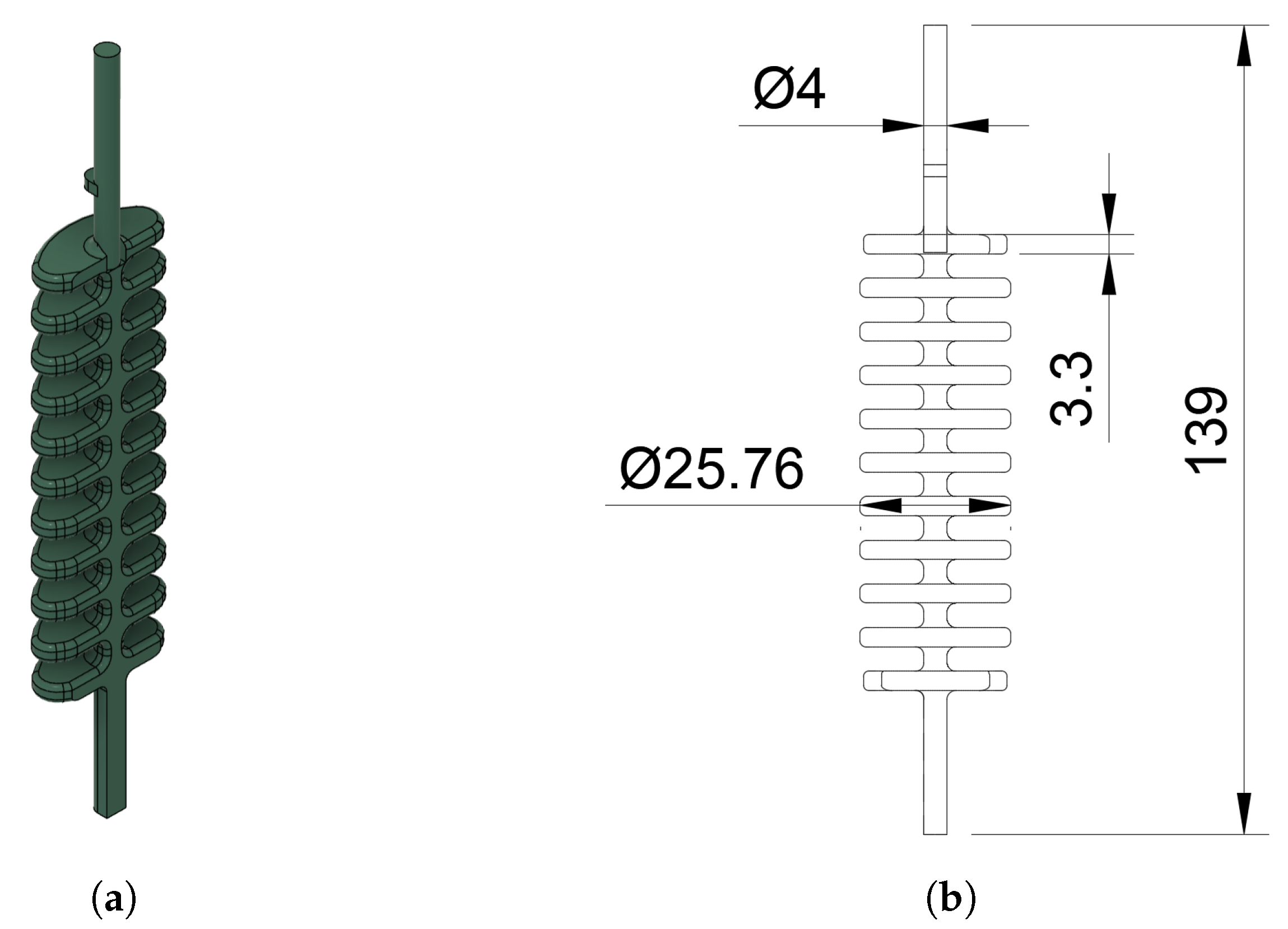
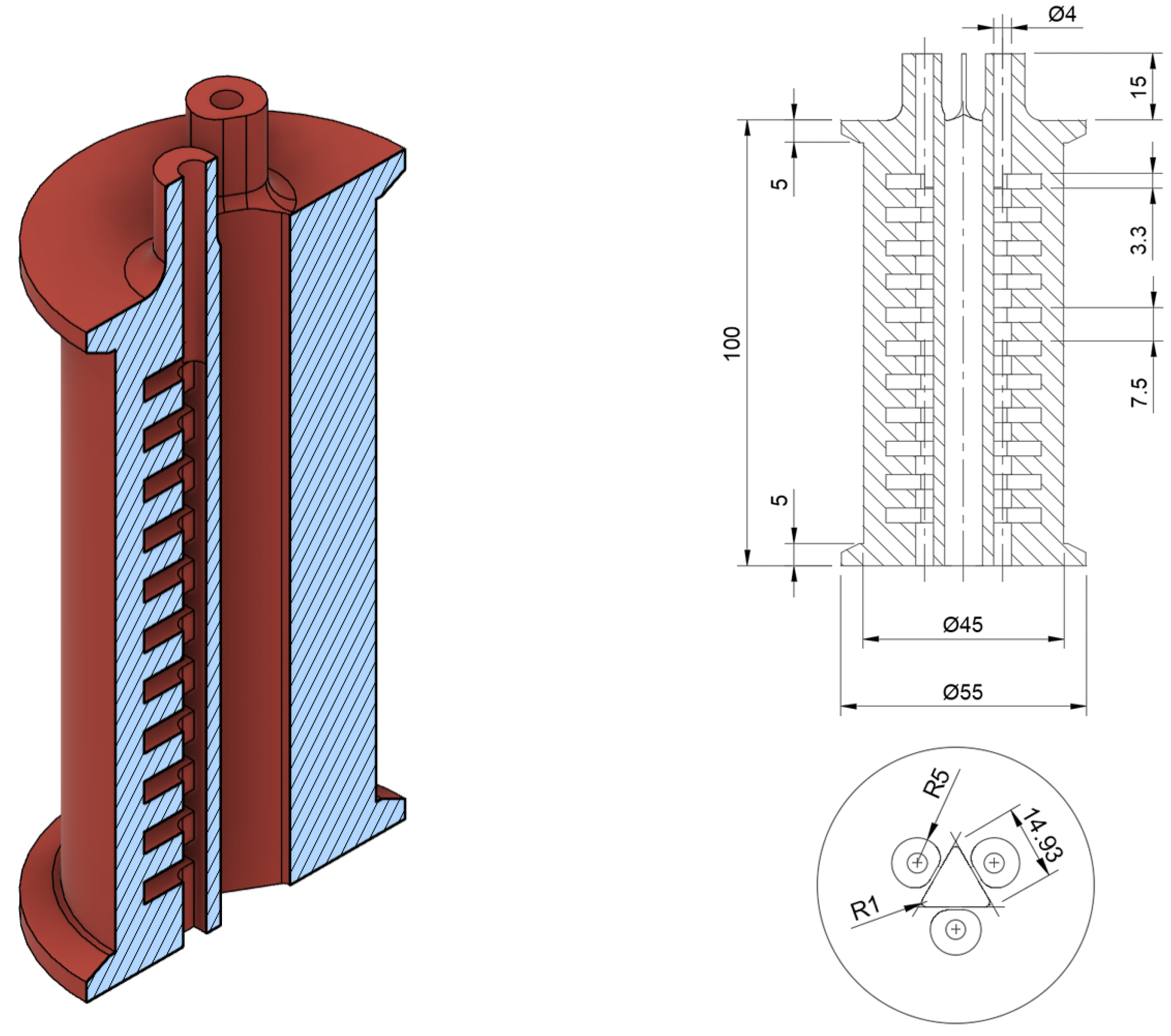
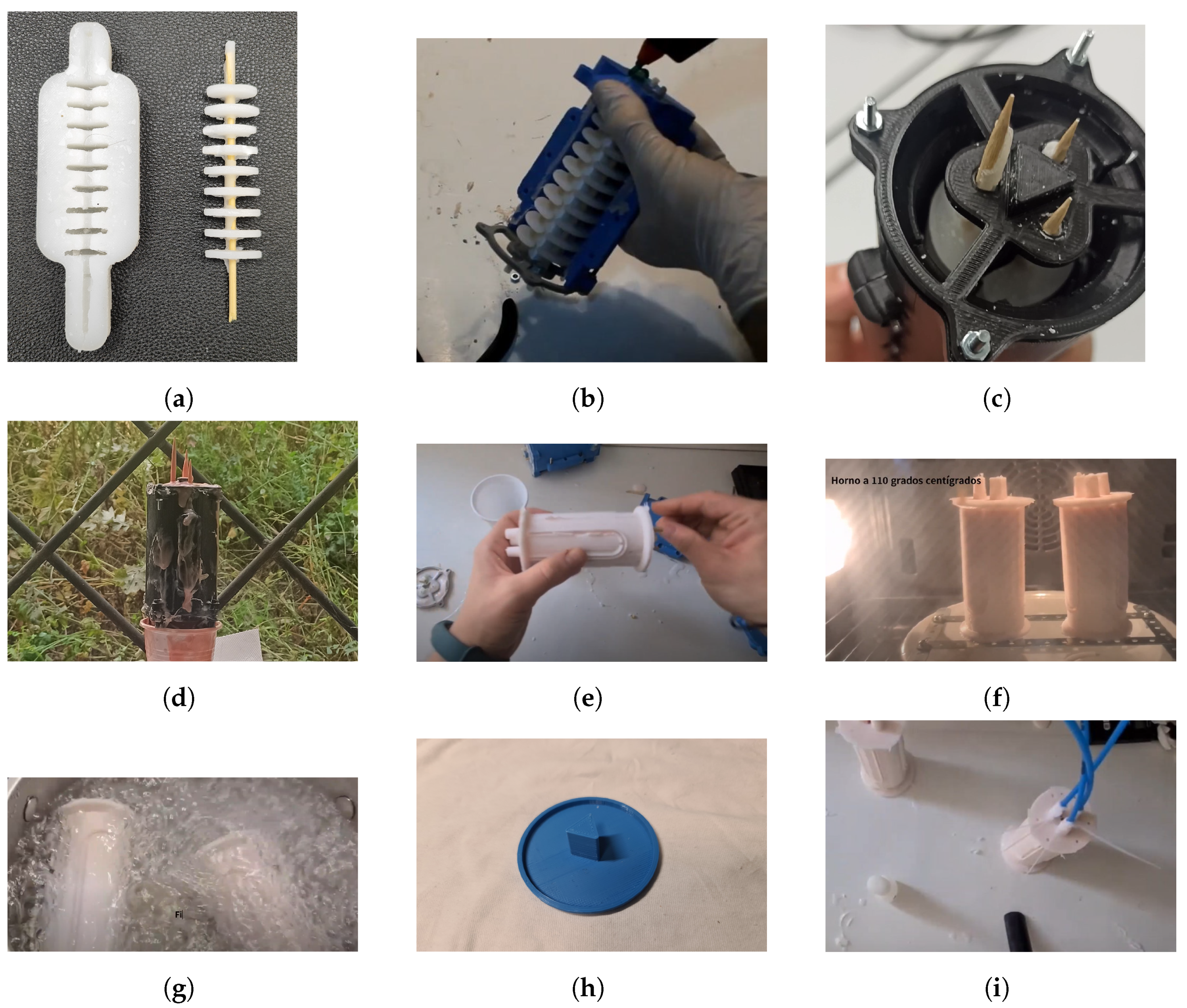
3.3. Manufacturing
3.4. Actuation Bank
4. Data Acquisition and Open-Loop Control
4.1. Hardware Setup
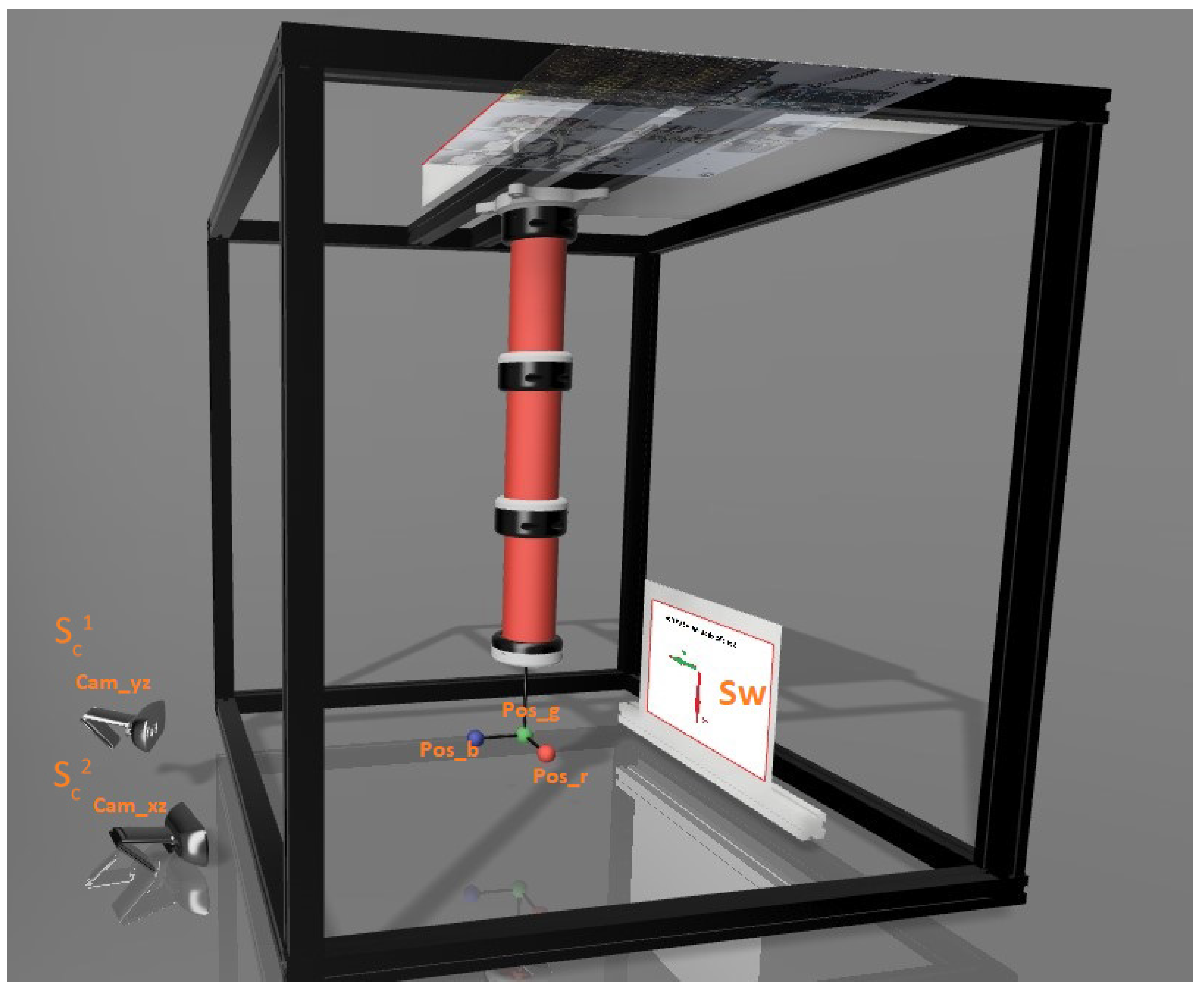
4.2. Vision Capture System
- corresponds to the depth of the camera (the distance from camera to the detected sphere), which is unknown.
- denotes the camera intrinsic parameters matrix, on which the focal lengths ( and ) and offsets ( and ) are reflected. These parameters are specific to each camera. In order to obtain them, it is necessary to perform some kind of intrinsic calibration the first time the camera is used. In this case, we have used the default calibration in Matlab, which consists of taking several pictures of the chessboard in Figure 11a at different angles and then calculating the distortion in each one of them. Latest null column has been inserted in the matrix to fit with the dimensions of .
- contains the rotation matrix () and the translation vector () from the real-world system to the camera system. As this matrix depends both on the position of the coordinate origin and on the position of the camera, which can easily be moved due to accidental slippage, it is necessary to recalibrate it at the beginning of each working session. For this purpose, the extrinsic calibration protocol, also available by default in Matlab, is used, and the grid in Figure 11a, whose lower-left corner is taken as the origin of the real-world reference system. From the dimensions of the squares, the translation and rotation with respect to their reference frame can be estimated. Subsequently, in the first measurement, the green sphere is taken as the origin of the real-world reference frame.
4.3. Dataset Generation: Table-Based Models
4.4. Open-Loop Control
5. Results
5.1. Final PAUL Version
5.2. Workspace Analysis
5.3. Performance of the Table-Based Models
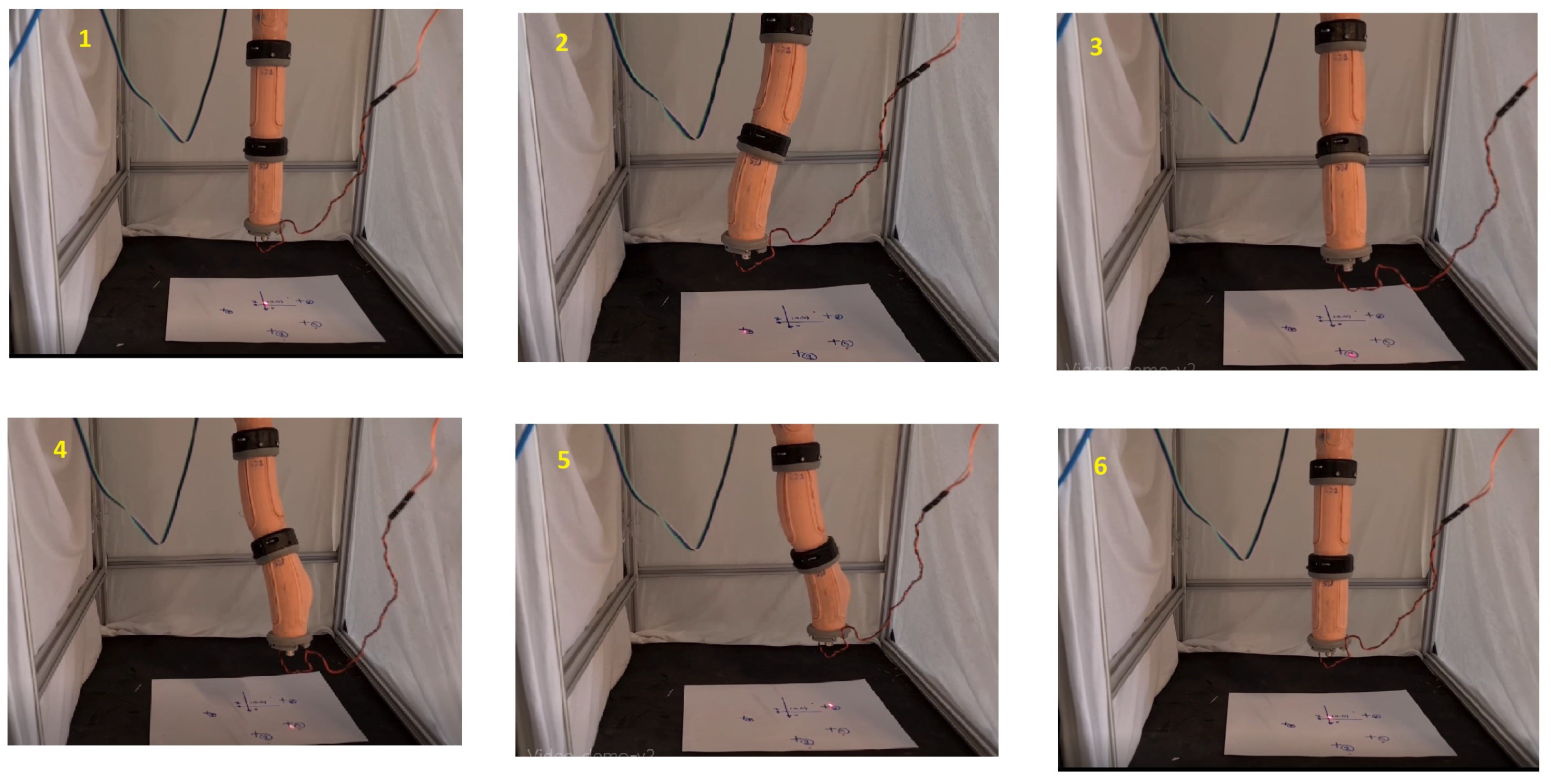
5.4. Bending Experiments
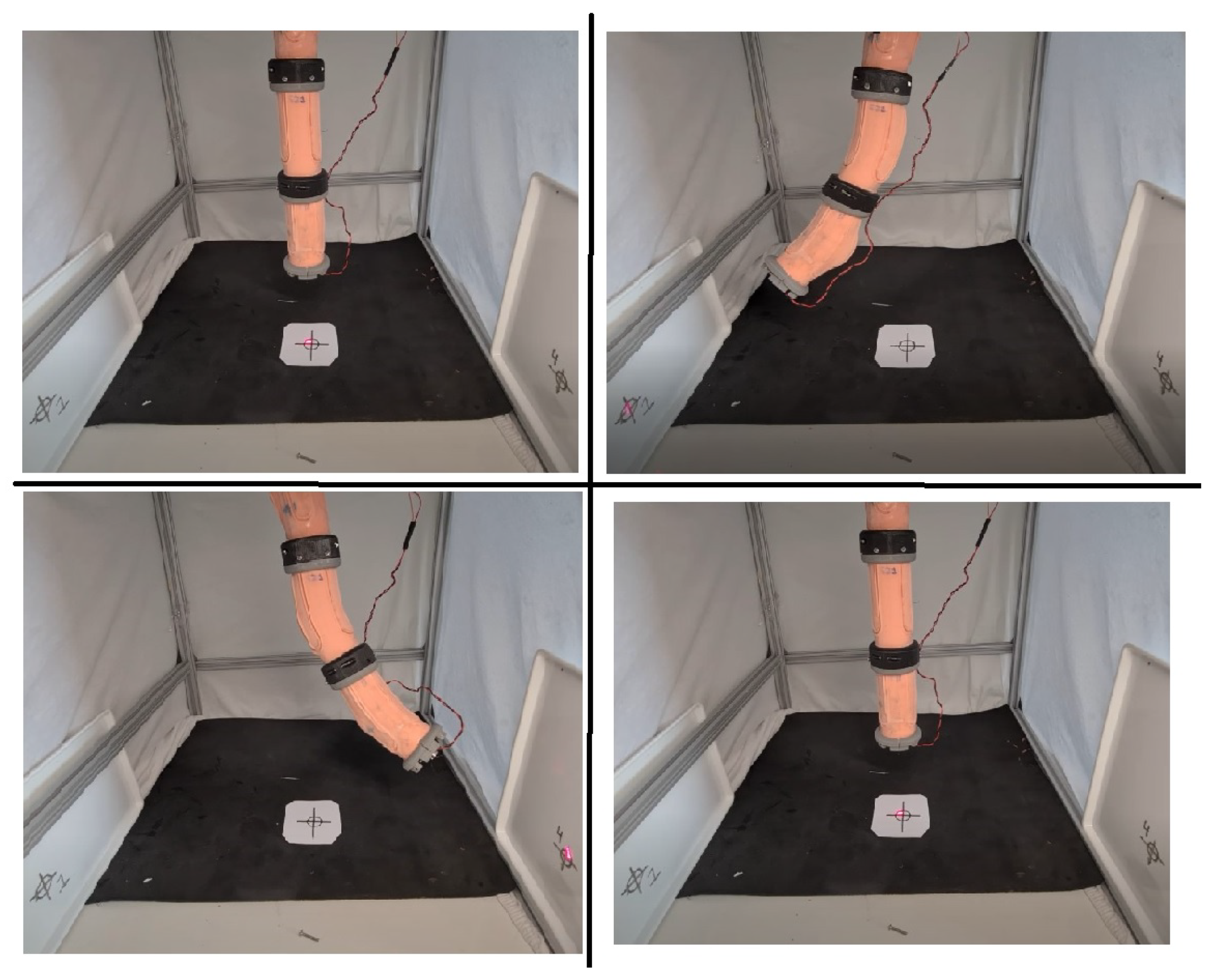
5.5. Weight Carrying Experiments
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| DOF | Degrees of Freedom |
| EAP | Electroactive Polymer |
| FEM | Finite Elements Method |
| FFNN | Feedforward Neural Network |
| HPN | Honeycomb Pneumatic Network |
| ML | Machine Learning |
| MSER | Maximally Stable External Regions |
| PAM | Pneumatic Artificial Muscle |
| PAUL | Pneumatic Articulated Ultrasoft Limb |
| PCC | Piecewise Constant Curvature |
| SMA | Shape Memory Alloys |
| TCA | Twisted and Coiled Actuators |
Appendix A. Conducted Experiments
References
- Manti, M.; Pratesi, A.; Falotico, E.; Cianchetti, M.; Laschi, C. Soft assistive robot for personal care of elderly people. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 833–838. [Google Scholar] [CrossRef]
- Carrasco Martínez, S.; Gamboa Montero, J.J.; Maroto Gómez, M.; Alonso Martín, F.; Salichs, M.A. Applying psychological and social strategies to increase engagement in human-robot interaction. Rev. Iberoam. Autom. Inform. Ind. 2023, 20, 199–212. [Google Scholar] [CrossRef]
- Paternò, L.; Lorenzon, L. Soft robotics in wearable and implantable medical applications: Translational challenges and future outlooks. Front. Robot. AI 2023, 10, 1075634. [Google Scholar] [CrossRef]
- Huang, H.; Tang, S.; Chai, W.; Sun, F.; Wu, D.; Miao, S.; Zhong, D.; Hou, H.; Dong, M. MCSG: A morphology configurable soft gripper with self-adaption modular composite finger. IEEE Trans. Ind. Electron. 2023, 71, 708–717. [Google Scholar] [CrossRef]
- Holsten, F.; Darkner, S.; Engell-Nørregård, M.P.; Erleben, K. Data Driven Inverse Kinematics of Soft Robots using Local Models. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montréal, QC, Canada, 20–24 May 2019; pp. 6251–6257. [Google Scholar] [CrossRef]
- Continelli, N.A.; Nagua, L.F.; Monje, C.A.; Balaguer, C. Modeling of a soft robotic neck using machine learning techniques. Rev. Iberoam. Autom. Inform. Ind. 2023, 20, 282–292. [Google Scholar] [CrossRef]
- Kalinsky, T.; Drotman, D.; Shih, B.; Aronoof-Spencer, E. Differential pressure control of 3D printed soft fluidic actuators. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Maksimkin, A.V.; Dayyoub, T.; Telyshev, D.V.; Gerasimenko, A.Y. Electroactive Polymer-Based Composites for Artificial Muscle-like Actuators: A Review. Nanomaterials 2022, 12, 2272. [Google Scholar] [CrossRef] [PubMed]
- Sun, M.; Tian, C.; Mao, L.; Meng, X.; Shen, X.; Hao, B.; Wang, X.; **. Int. J. Robot. Res. 2014, 35, 161–185. [Google Scholar] [CrossRef]
- Babu, S.P.; Sadeghi, A.; Mondini, A.; Mazzolai, B. Antagonistic pneumatic actuators with variable stiffness for soft robotic applications. In Proceedings of the RoboSoft 2019—2019 IEEE International Conference on Soft Robotics, Seoul, Republic of Korea, 14–18 April 2019; pp. 283–288. [Google Scholar] [CrossRef]
- Heung, K.H.; Li, H.; Wong, T.W.; Ng, S.S. Assistive robotic hand with bi-directional soft actuator for hand impaired patients. Front. Bioeng. Biotechnol. 2023, 11, 1188996. [Google Scholar] [CrossRef]
- Brown, E.; Rodenberg, N.; Amend, J.; Mozeika, A.; Steltz, E.; Zakin, M.R.; Lipson, H.; Jaeger, H.M. Universal robotic gripper based on the jamming of granular material. Proc. Natl. Acad. Sci. USA 2010, 107, 18809–18814. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Kan, Z.; Zeng, J.; Wang, M.Y. Hybrid Jamming for Bioinspired Soft Robotic Fingers. Soft Robot. 2020, 7, 292–308. [Google Scholar] [CrossRef]
- Yang, H.; Yuan, L.; Yao, X.F.; Fang, D.N. Piezoresistive response of graphene rubber composites considering the tunneling effect. J. Mech. Phys. Solids 2020, 139, 103943. [Google Scholar] [CrossRef]
- Tondu, B.; Ippolito, S.; Guiochet, J.; Daidie, A. A Seven-degrees-of-freedom robot-arm driven by pneumatic artificial muscles for humanoid robots. Int. J. Robot. Res. 2005, 24, 257–274. [Google Scholar] [CrossRef]
- Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; Atkeson, C.G.; Park, Y.L. Design of a Lightweight Soft Robotic Arm Using Pneumatic Artificial Muscles and Inflatable Sleeves. Soft Robot. 2018, 5, 204–215. [Google Scholar] [CrossRef]
- Oh, N.; Lee, J.G.; Rodrigue, H. Torsional Pneumatic Actuator Based on Pre-Twisted Pneumatic Tubes for Soft Robotic Manipulators. IEEE/ASME Trans. Mechatron. 2023, 28, 3191–3201. [Google Scholar] [CrossRef]
- Oh, N.; Rodrigue, H. Toward the Development of Large-Scale Inflatable Robotic Arms Using Hot Air Welding. Soft Robot. 2023, 10, 88–96. [Google Scholar] [CrossRef]
- Park, M.J.; Kim, W.; Yu, S.Y.; Cho, J.; Kang, W.; Byun, J.; Jeong, U.; Cho, K.J. Deployable Soft Origami Modular Robotic Arm With Variable Stiffness Using Facet Buckling. IEEE Robot. Autom. Lett. 2023, 8, 864–871. [Google Scholar] [CrossRef]
- Alessi, C.; Falotico, E.; Lucantonio, A. Ablation Study of a Dynamic Model for a 3D-Printed Pneumatic Soft Robotic Arm. IEEE Access 2023, 11, 37840–37853. [Google Scholar] [CrossRef]
- Jiang, H.; Wang, Z.; Liu, X.; Chen, X.; **, Y.; You, X.; Chen, X. A two-level approach for solving the inverse kinematics of an extensible soft arm considering viscoelastic behavior. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 6127–6133. [Google Scholar] [CrossRef]
- Jiang, H.; Wang, Z.; **, Y.; Chen, X.; Li, P.; Gan, Y.; Lin, S.; Chen, X. Design, Control, and Applications of a Soft Robotic Arm. ar**, and Actuation. IEEE Robot. Autom. Lett. 2022, 7, 5015–5022. [Google Scholar] [CrossRef]
- Baysal, C.V. An Inverse Dynamics-Based Control Approach for Compliant Control of Pneumatic Artificial Muscles. Actuators 2022, 11, 111. [Google Scholar] [CrossRef]
- Li, P.; Wang, G.; Jiang, H.; **, Y.; Gan, Y.; Chen, X.; Ji, J. A Q-learning Control Method for a Soft Robotic Arm Utilizing Training Data from a Rough Simulator. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics, ROBIO 2021, Sanya, China, 27–31 December 2021; pp. 839–845. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Hassan, T.; Falotico, E.; Ansari, Y.; Cianchetti, M.; Laschi, C. Closed loop control of a braided-structure continuum manipulator with hybrid actuation based on learning models. In Proceedings of the 2019 IEEE International Conference on Cyborg and Bionic Systems, CBS 2019, Munich, Germany, 18–20 September 2019; pp. 116–122. [Google Scholar] [CrossRef]
- Centurelli, A.; Arleo, L.; Rizzo, A.; Tolu, S.; Laschi, C.; Falotico, E. Closed-Loop Dynamic Control of a Soft Manipulator Using Deep Reinforcement Learning. IEEE Robot. Autom. Lett. 2022, 7, 4741–4748. [Google Scholar] [CrossRef]
- Fang, G.; Tian, Y.; Yang, Z.X.; Geraedts, J.M.; Wang, C.C. Efficient Jacobian-Based Inverse Kinematics With Sim-to-Real Transfer of Soft Robots by Learning. IEEE/ASME Trans. Mechatron. 2022, 27, 5296–5306. [Google Scholar] [CrossRef]
- Almanzor, E.; Ye, F.; Shi, J.; Thuruthel, T.G.; Wurdemann, H.A.; Iida, F. Static Shape Control of Soft Continuum Robots Using Deep Visual Inverse Kinematic Models. IEEE Trans. Robot. 2023, 39, 2973–2988. [Google Scholar] [CrossRef]
- Yip, M.C.; Camarillo, D.B. Model-less feedback control of continuum manipulators in constrained environments. IEEE Trans. Robot. 2014, 30, 880–889. [Google Scholar] [CrossRef]
- Bruder, D.; Gillespie, B.; David Remy, C.; Vasudevan, R. Modeling and Control of Soft Robots Using the Koopman Operator and Model Predictive Control. ar**v 2019, ar**v:1902.02827. [Google Scholar] [CrossRef]
- Yang, Y.S. Measurement of Dynamic Responses from Large Structural Tests by Analyzing Non-Synchronized Videos. Sensors 2019, 19, 3520. [Google Scholar] [CrossRef]
- Martin-Barrio, A.; Terrile, S.; Diaz-Carrasco, M.; del Cerro, J.; Barrientos, A. Modelling the Soft Robot Kyma Based on Real-Time Finite Element Method. Comput. Graph. Forum 2020, 39, 289–302. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Manti, M.; Laschi, C. Stable Open Loop Control of Soft Robotic Manipulators. IEEE Robot. Autom. Lett. 2018, 3, 1292–1298. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Mould | Connectors |
|---|---|---|
| Layer Height | ||
| Infill | 5% | 14% |
| Number of Perimeters | 2 | 3 |
| Extrusion Temperature | 195 | 195 |
| Bed Temperature | 200 | 200 |
| Property | PlatSil FS10 | EasyPlat 0030 | TinSil 8015 |
|---|---|---|---|
| Type | Platinum | Platinum | Til |
| Shore Hardness | A13 | 00-30 | A15 |
| Curing Time | 12 | 4 | 24 |
| Viscosity | 3 | 12 | |
| Density | / | / | / |
| Dataset Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| Number of Samples | 100 | 100 | 100 | 500 | 6 | 200 | 200 |
| Total Time (s) | 695 | 697 | 712 | 3884 | 38 | 1210 | 1199 |
| Time per Sample (s) | 6.95 | 6.97 | 7.13 | 7.77 | 6.47 | 6.05 | 6.00 |
| Reference | Actuation Type | Control Methodology | Robot Length | Error |
|---|---|---|---|---|
| [12] | SMA | FEM + FFNN | 240 | 4 |
| [67] | Tendon-driven | FEM | 1200 | 20 |
| [60] | Tendon-driven | Reinforcement Learning | 418 | |
| [45] (3 segment, open-loop) | Pneumatic (HPN) | FFNN | 630 | |
| [59] | Pneumatic (HPN) | Reinforcement Learning | 630 | 20 |
| [68] | Pneumatic (3D printed) | Reinforcement Learning | 400 | 22 |
| [56] | Pneumatic (STIFF-FLOP based) | FEM | 300 | |
| PAUL | Pneumatic (STIFF-FLOP based) | Table-Based | 390 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Samartín, J.F.; Rieker, A.; Barrientos, A. Design, Manufacturing, and Open-Loop Control of a Soft Pneumatic Arm. Actuators 2024, 13, 36. https://doi.org/10.3390/act13010036
García-Samartín JF, Rieker A, Barrientos A. Design, Manufacturing, and Open-Loop Control of a Soft Pneumatic Arm. Actuators. 2024; 13(1):36. https://doi.org/10.3390/act13010036
Chicago/Turabian StyleGarcía-Samartín, Jorge Francisco, Adrián Rieker, and Antonio Barrientos. 2024. "Design, Manufacturing, and Open-Loop Control of a Soft Pneumatic Arm" Actuators 13, no. 1: 36. https://doi.org/10.3390/act13010036