1. Introduction
Autonomous underwater vehicles (AUVs) are widely used in military and commercial fields due to their small size, low cost, high degree of autonomy and flexible deployment. They are irreplaceable tools in applications such as accident rescue, seabed topographic map**, object detection, observation of ocean phenomena and marine resource development [
1,
2,
3,
4,
5,
6,
7,
8]. With the increasing complexity of underwater tasks, it is necessary to improve work efficiency through the cooperation of multiple AUVs, which can even complete tasks that cannot be performed by a single AUV [
9]. At the same time, formation control has become a fundamental issue in the cooperative control of multiple AUVs. In recent years, many scholars have carried out research on the formation control of multiple agents and the common methods are as follows: the virtual structure method [
10,
11]; the behavior-based strategy [
12]; the leader–follower approach [
13,
14,
15,
16,
17,
18,
19,
20]; the potential field function approach [
21]; the path-following method [
22]; and the consensus theory method [
23,
24]. Due to the complicated underwater environment, most methods cannot be directly applied to the formation control of multiple AUVs. However, the leader–follower approach is the most widely used in engineering because of its simple structure and easy expansion [
25]. In this method, the leader moves according to a given trajectory, and the followers track the leader to maintain the desired formation structure. Therefore, formation control can be achieved by changing the predefined trajectory of the leader and the expected structure of the formation.
In order to realize formation control, AUVs need to exchange some key information with each other through wireless communication. At present, there are three main wireless communication methods: radio communication, optical communication and acoustic communication. Radio signals decay quickly underwater and optical communication range is short and requires high-quality water. Therefore, these two communication methods are rarely used in underwater environments. Acoustic communication is the most effective method because of its slow attenuation speed and long transmission distance [
26,
27]. However, acoustic communication also has non-negligible limitations, including delay, path loss, limited bandwidth, multipath and so on [
28,
29]. Acoustic communication is one of the most significant impacts on formation control schemes due to communication delay, packet discreteness and dropout. At present, many scholars have studied underwater wireless sensor networks (UWSN) to solve communication constraint problems. In [
30], the author surveys recent routing protocols for UWSN to inspire researchers to design efficient routing protocols. In [
31], a probabilistic weight-based energy-efficient cluster routing is presented for large-scale wireless sensor networks protocol. Simulation results show that this protocol has better performance in many aspects, such as delay, throughput and packet delivery rate. In [
32], Wang proposes a dual prediction data reduction approach for wireless sensor networks based on the Kalman filter. With respect to data reduction, data accuracy and energy consumption, the suggested method has produced the best results. The above work contributes significantly to the improvement of communication effectiveness. In this paper, we use the designed network protocol and solve the problems of communication delay, packet discreteness and dropout in formation control.
Communication delay consists of the propagation delay and parsing delay of the packet. Propagation delay refers to the travel time of the packets underwater, which is related to the underwater acoustic transmission speed and transmission distance. Parsing delay is the conversion time between acoustic and electrical signals, which is associated with packet size, communication protocol and other factors. The communication delay has the greatest influence on formation control. Although it can be calculated by the timestam** of each sent packet, this will increase the packet size and communication delay [
33]. Many researchers have focused on dealing with communication delay and they usually assume that communication delay is constant, bounded, or small. Some of the representative results are presented below. In [
34], Yang assumes that communication delay is constant and the simulation results demonstrate that the decoupled controller proposed in the paper can tolerate a constant delay. In [
35], Yan designs a coordinated control protocol under a bounded communication delay, which is less than the communication period. It turns out that the system with delay is still stable but takes more time than the system without delay. In [
36], Chen proposes a formation control method for a homogeneous and a heterogeneous AUV group combining the consensus theory and leader–follower method under communication delay. However, time-varying communication delay is assumed to have a fixed upper limit in the paper. In [
37], a distributed leader–follower formation controller is proposed based on state feedback and consensus algorithms under a time-varying differentiable delay. Ref. [
38] regards communication delay as a function. Both the function and its derivative have an upper bound and a leader–follower controller is designed to achieve formation control. All the above methods have solved the problem of formation control under communication delay to some extent. However, in actual applications, the assumption that the communication delay is constant or bounded is unreasonable because the propagation delay and parsing delay are difficult determine when AUVs run in an unknown environment [
39]. The assumption that communication delay is small is also very dangerous, as the proposed control method may be unstable if the actual delay is too large [
40]. Therefore, it is not certain whether the above approaches are extremely practical in formation control under communication delay.
Packet discreteness and dropout in acoustic communication are mainly caused by path loss, noise and multipath propagation. It has rarely been considered in previous studies. In [
41], Chen proposes a distributed event-triggered communication mechanism to overcome the problems of packet discreteness and dropout. This method is mainly ap-plied to linear models and is not easily implemented in engineering. Most researchers assume that AUVs can communicate underwater continuously with acoustic communication [
42]. However, it is obviously unreasonable in practical applications. On the one hand, the high-powered acoustic modem cannot work continuously for a long time. On the other hand, packet dropout is inevitable and can also be considered a special case of packet discreteness. Discrete packets will reduce the frequency of information exchange between multiple AUVs, which decreases the accuracy and stability of formation control. As a result, packet discreteness and dropout are also important issues that must be considered for formation control.
Based on the above discussion, this paper is concerned with the formation control of multiple AUVs under communication delay, packet discreteness and dropout. The main contributions are as follows:
- (1)
The communication delay is estimated based on the kernel density estimation method. Kernel density estimation is a non-parametric estimation method that does not need prior knowledge and an accurate mathematical model of communication delay. Instead, we can obtain an accurate distribution of delay with this method according to the characteristics and properties of delay values based on underwater experiments. Compared with other methods, this method has more extensive applications.
- (2)
The packet discreteness and dropout problems are solved by information prediction based on the curve fitting method. This method can be used to predict the key states of the leader AUV to generate a continuous and precise trajectory for the follower AUVs.
- (3)
We derive a kinematic model for the error of the formation control system. The follower controller is designed using the input–output feedback linearization method and the stability of this method is proved by Lyapunov stability theory.
- (4)
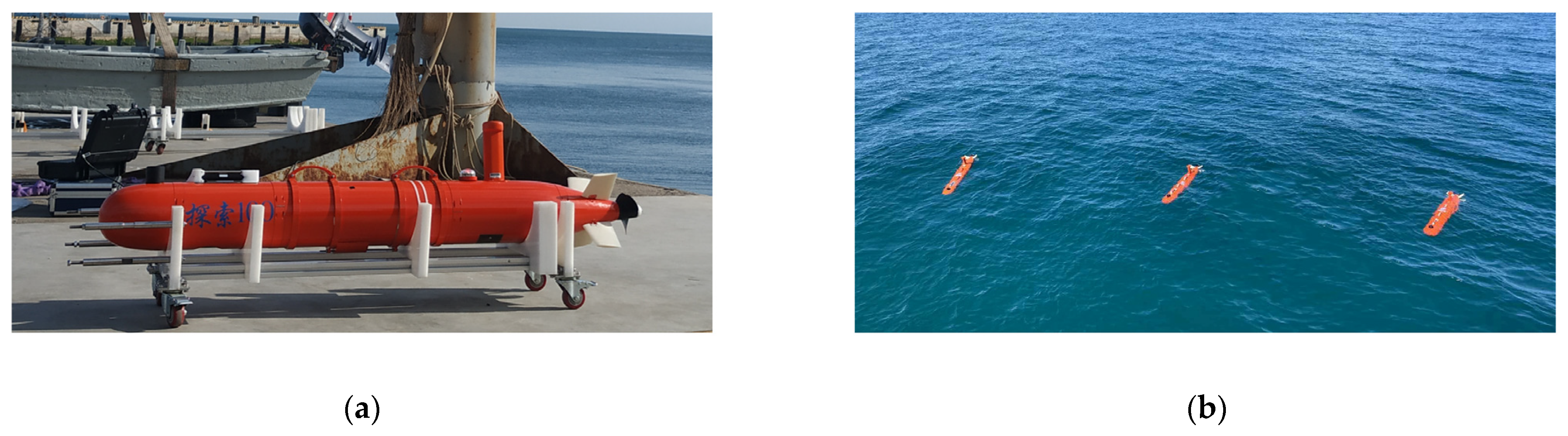
Both the simulation in MATLAB and the field tests on the lake are carried out to verify the feasibility of the scheme presented in this paper.
This paper is organized as follows.
Section 2 includes the kinematic model of the AUV and the mathematical description of formation control.
Section 3 proposes methods to solve the communication delay, packet discreteness and dropout problems.
Section 4 presents the formation control scheme of multiple AUVs.
Section 5 and
Section 6 show the simulation and test results. Finally,
Section 7 gives the conclusions and future perspectives.
3. Solutions of Communication Delay, Packet Discreteness and Dropout
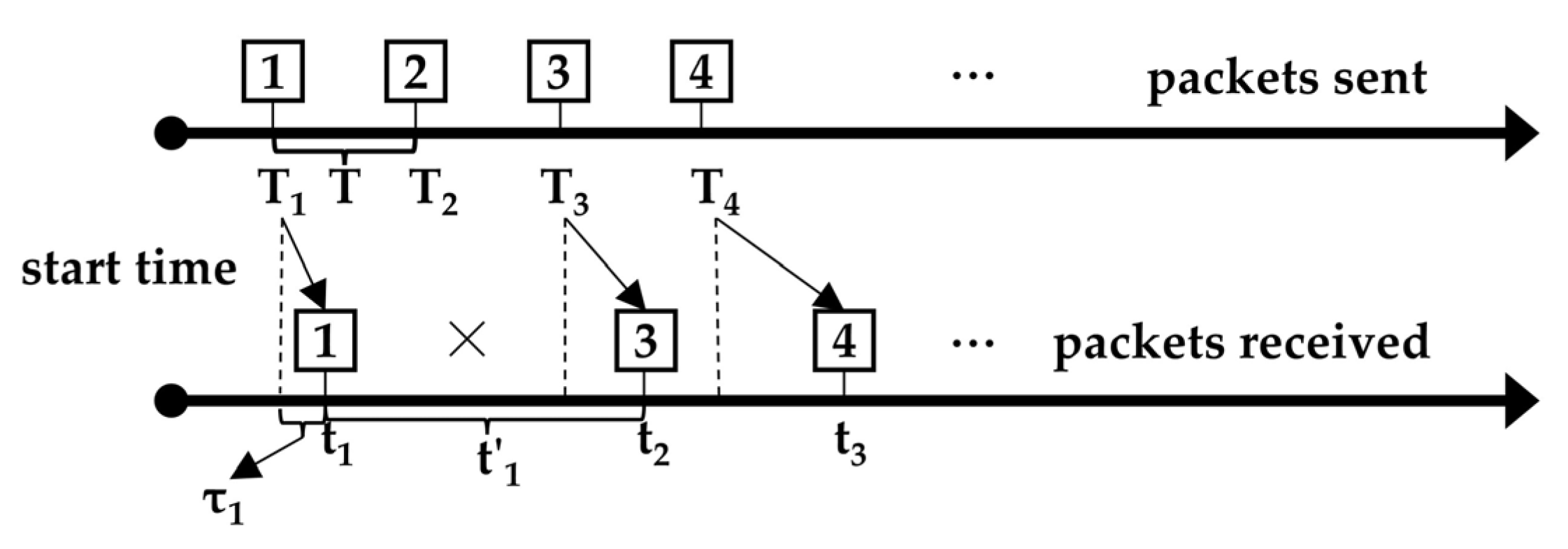
To achieve formation control, each follower AUV needs constant and accurate information from the leader AUV. However, when the AUV moves underwater, the conditions of acoustic communication become complex, which causes communication delay, packet discreteness and dropout. The information flow of the communication from the leader to the follower is shown in
Figure 2. The horizontal axis above represents the time when a series of packets are sent by the leader AUV, where the number in the square boxes represents the serial number of packets sent by the leader AUV (i.e., 1, 2, 3, 4 in the square boxes),
is the time when the packet
is sent by the leader,
represents a fixed interval between the sent packets. The horizontal axis below represents the time when a series of packets are received by the follower AUV, where the numbers in the squares represent the serial number of packets received by the follower AUV (i.e., 1, 3, 4 in the squares),
denotes the time when the packet
is received by the followers,
is a set of communication delay (for example, packet 1 is sent and received at
and
, respectively, then
can be calculated as
) and
is a set of the discrete time between the received packets. It can be seen from
Figure 2 that the sent packets may be received after a period of time or not. For example, packet 1 sent at time
is received by the follower at time
, but packet 2 sent at time
is not received. In this case, packet 1 is received by the follower with a communication delay, and packet 2 sent by the leader is lost.
In short, the follower cannot obtain constant and accurate states of the leader because of communication delay, packet discreteness and dropout. In
Section 3.1, the kernel density method is used to build the communication delay distribution model and generate the delay subject to the distribution model. Furthermore, in
Section 3.2, we use the curve fitting method to predict the states of the leader to solve the problems of packet discreteness and dropout.
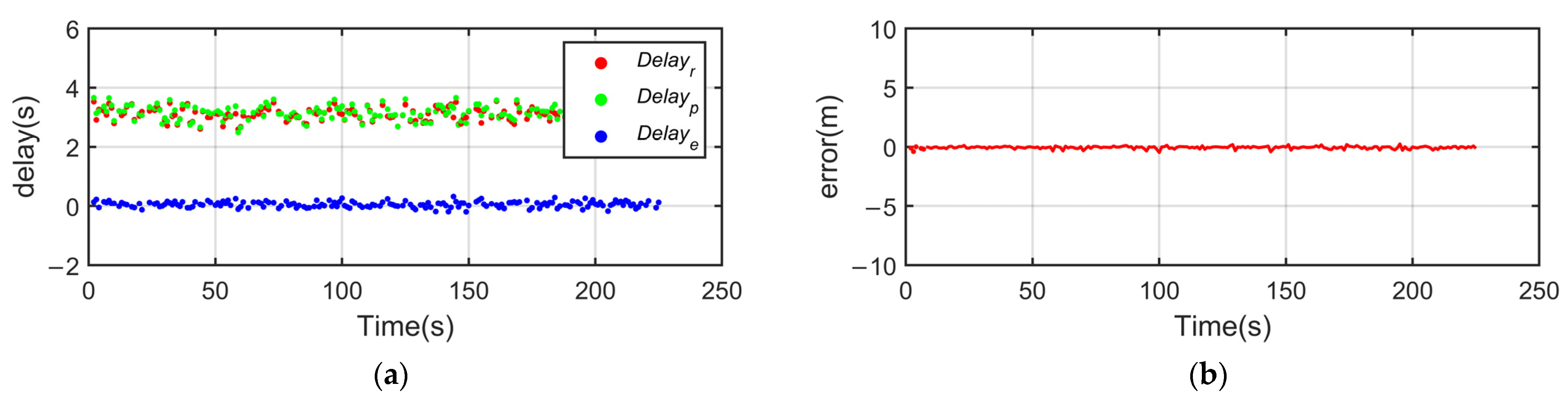
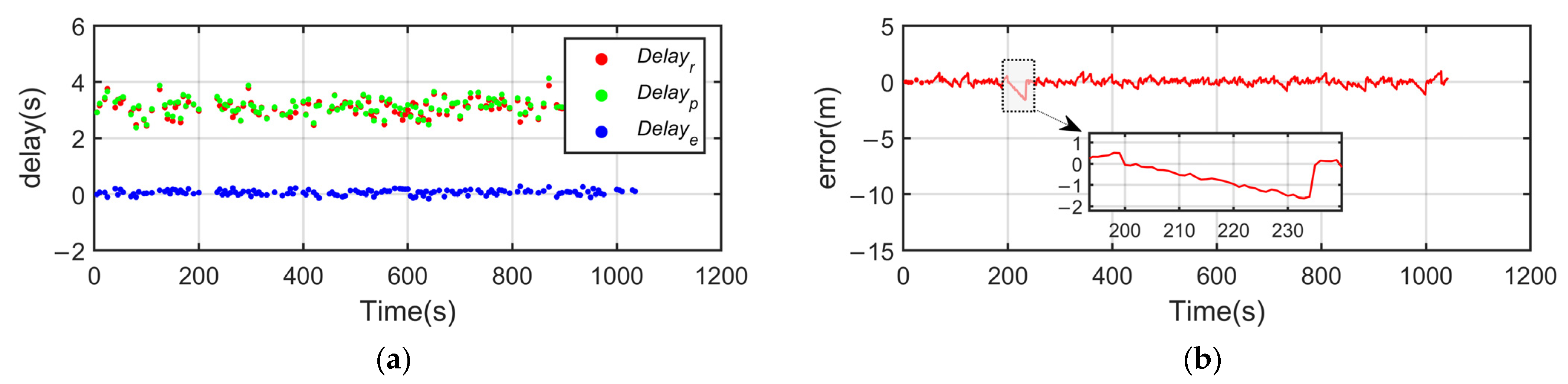
3.1. Estimation of Communication Delay
Communication delay is composed of the propagation delay and parsing delay of the packets. In practice, the propagation delay is related to the speed and distance of propagation. The propagation speed of the sound is affected by environmental factors such as temperature, depth, salinity, etc. Therefore, we adopt a propagation model approved by the United Nations Educational, Scientific and Cultural Organization (UNESCO) to calculate the speed of sound underwater [
43]. Then, the propagation delay can be approximately expressed as:
where
is the Euclidean distance between the leader and the follower and
is the speed of the sound.
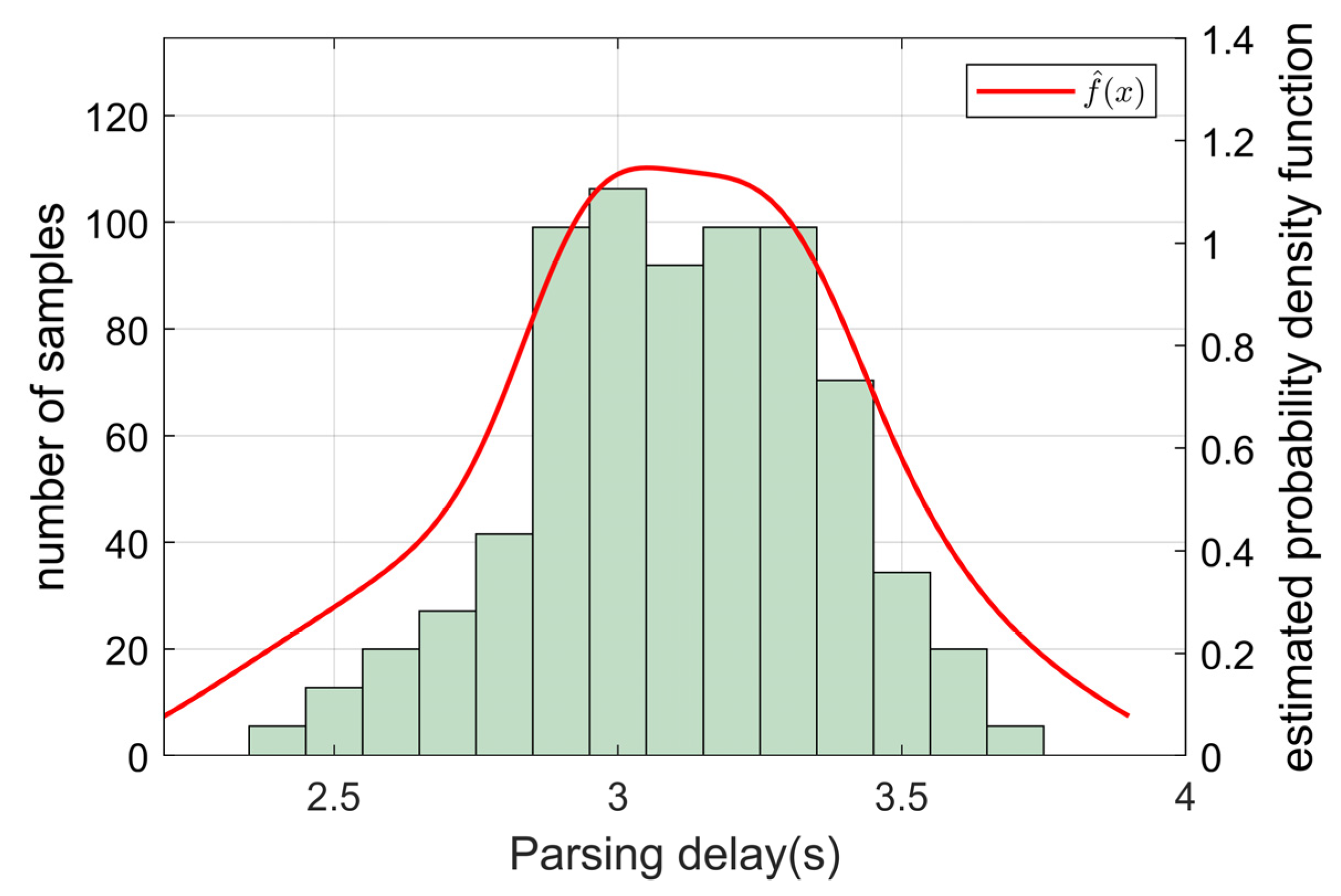
Based on the experimental data, the parsing delay is obtained using the kernel density method. Let
be independent and identically distributed samples of the parsing delay. Let
be the probability density function of the samples. Then, the estimated probability density function [
44] can be written as:
where
is the bandwidth, a neighborhood of the variable
;
is the total number of samples;
is a kernel function and the following three equations are satisfied.
According to Equation (7), given the total number of samples , is associated with the bandwidth and kernel function . If is too small, the number of samples used to estimate is also small, resulting in a decrease in the bias and an increase in the variance of the estimation. Conversely, if is too large, we can obtain an inaccurate estimation with a higher bias and lower variance. Therefore, how to obtain the best is extremely critical.
Define the integral mean square error function as:
To minimize
, the optimal bandwidth is calculated as:
where
can be approximately replaced by
.
The Gaussian function has convenient mathematical properties and satisfies the requirements of the kernel function, so it is chosen as the kernel function, that is,
. Then, the best bandwidth can be calculated according to Equation (10).
By combining Equations (7) and (11), we can obtain the estimated probability density function:
After that, we introduce the method of generating the parsing delay that conforms to the distribution. Let the random variable
obey a uniform distribution between 0 and 1, i.e.,
. Define the random variable of the parsing delay as:
where
is a monotonically increasing map** function from
to
. Then,
where
and
are the distribution functions of
and
, respectively. Hence, we can obtain
and
The map** function
can be determined according to Equation (15). By combining Equations (13) and (15), the parsing delay can be calculated as:
where
represents the parsing delay and
denotes the uniformly distributed random number generated by the computer in the interval
.
Finally, we can obtain the propagation delay and parsing delay of acoustic communication from Equations (6) and (16), respectively:
where
is the estimation of the communication delay.
3.2. Prediction of Leader States
When multiple AUVs move in formation underwater, the followers can only receive discrete states of the leader due to packet discreteness and dropout. To improve the accuracy and stability of formation control, the followers need continuous states of the leader. Therefore, the curve fitting method is applied to predict the states of the leader [
45]. The reliable and discrete packet of leader states received by the followers is defined as
, where
represents the number of received packets. Let
be the minimum number of packets required f the curve fitting method. If
is not less than
, a third-degree polynomial (simulation results show that a higher-degree polynomial does not mean a more precise prediction) is used to predict the x-coordinate of the leader.
To obtain polynomial parameters, linear equations are expressed in matrix form:
where
,
and
.
The pseudoinverse method is used to solve Equation (19). We can then obtain:
where
is the left inverse of
. Then, when
, the x-coordinate of the leader is calculated as:
where
.
The y-coordinate of the leader can also be predicted in the same way, i.e.,
. Referring to Equations (19)–(21), the y-coordinate of the leader can be obtained as:
where
. Equations (21) and (22) are the predictions of the leader states.
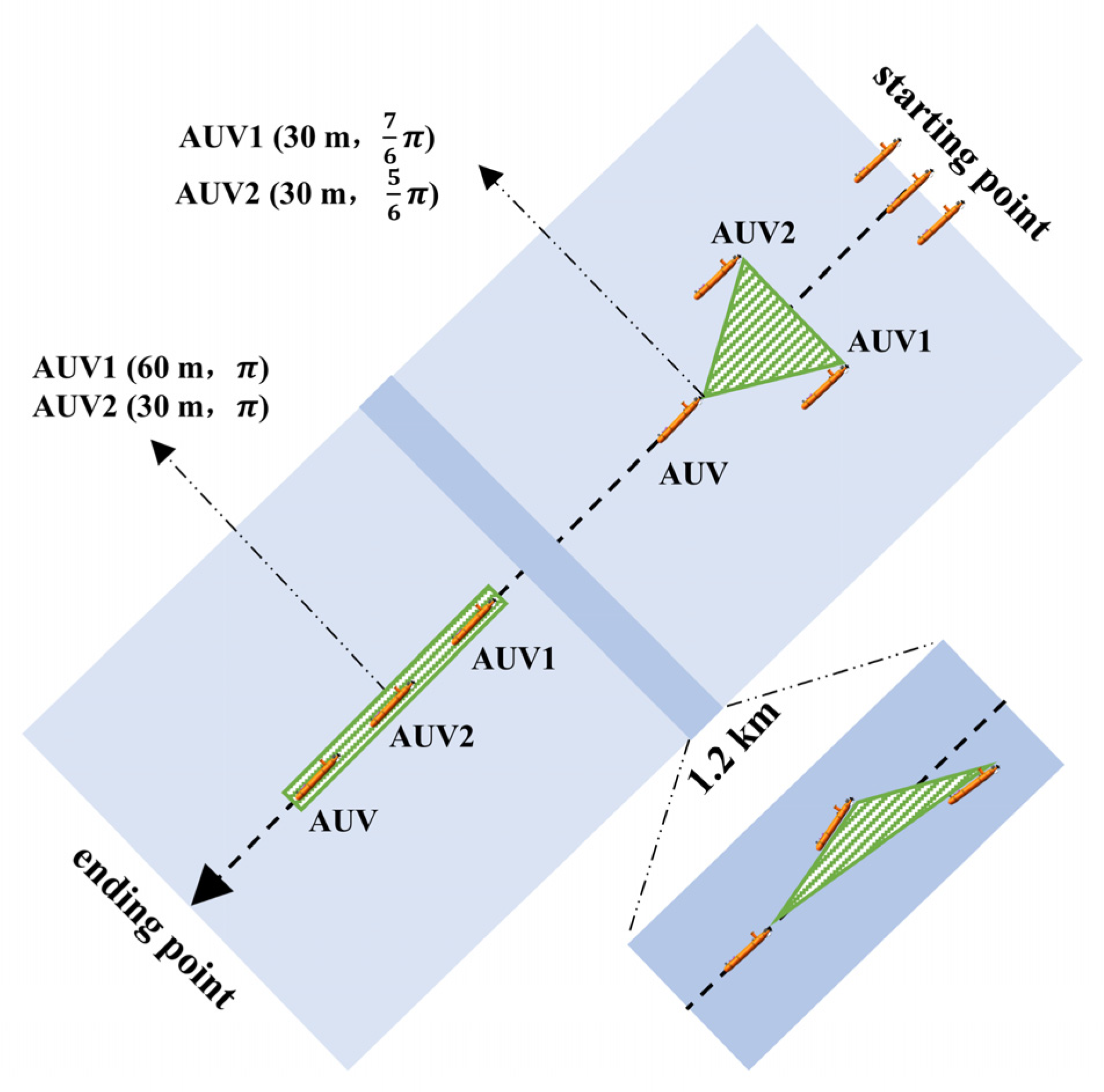
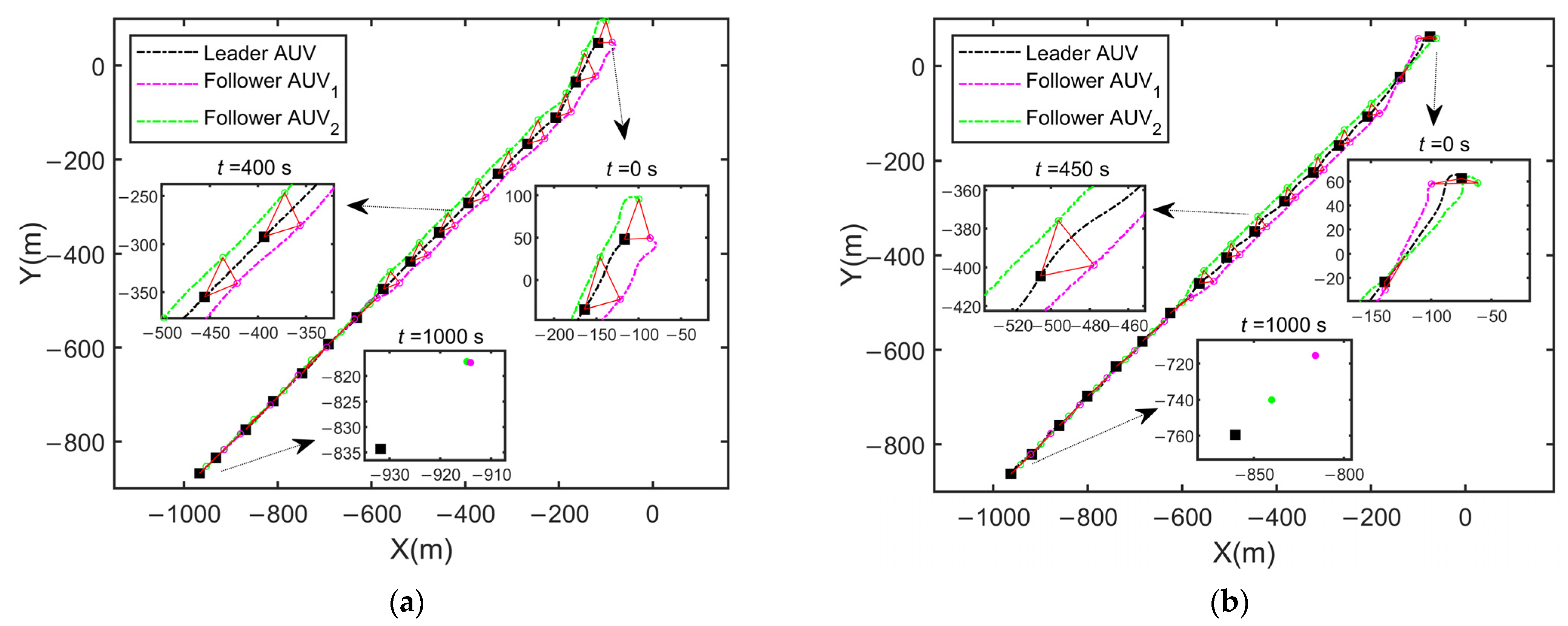
7. Conclusions
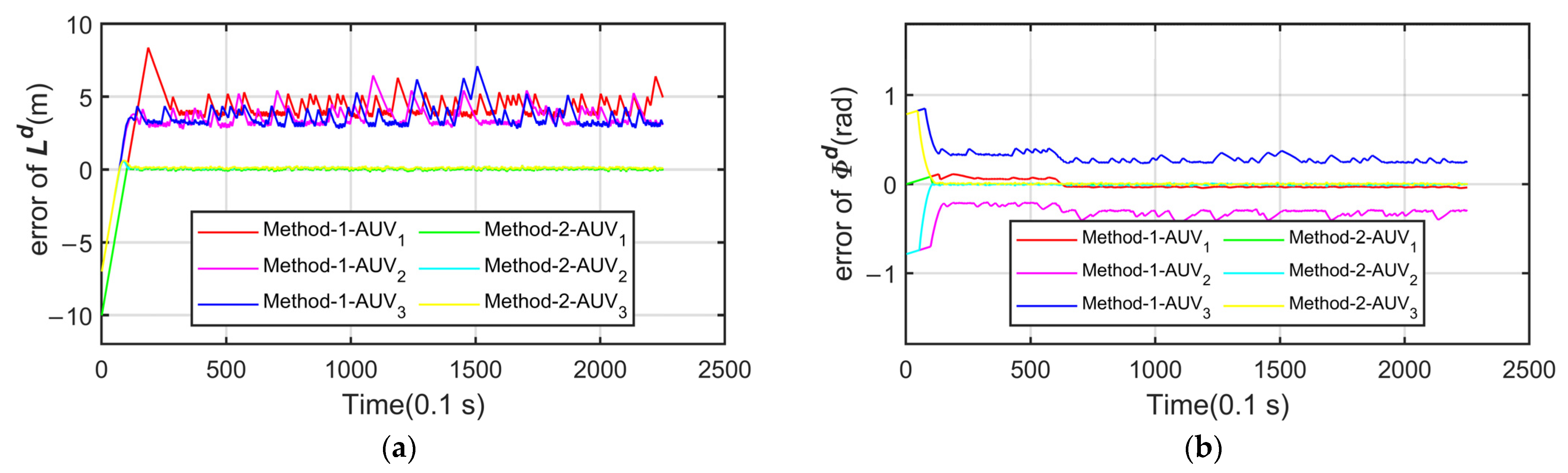
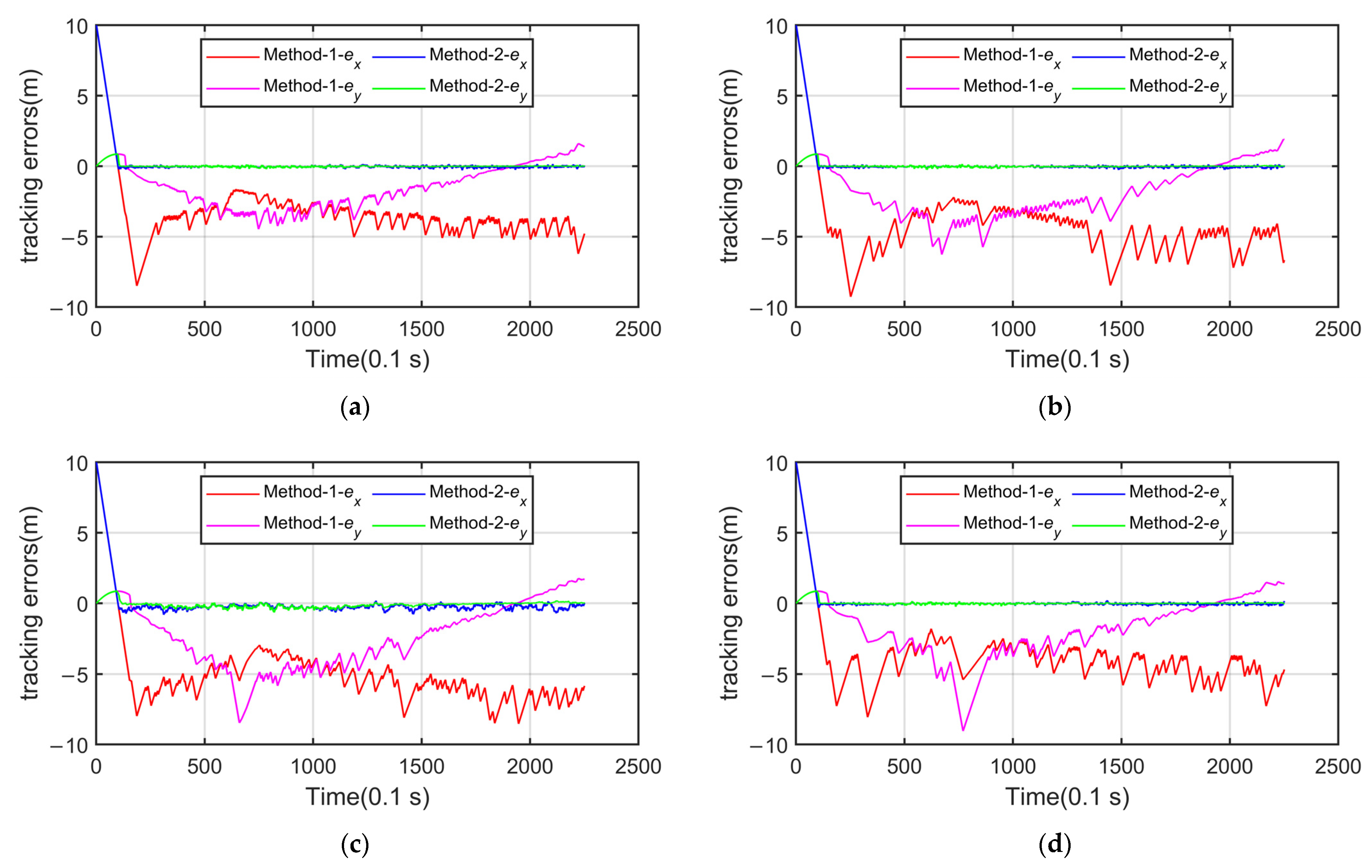
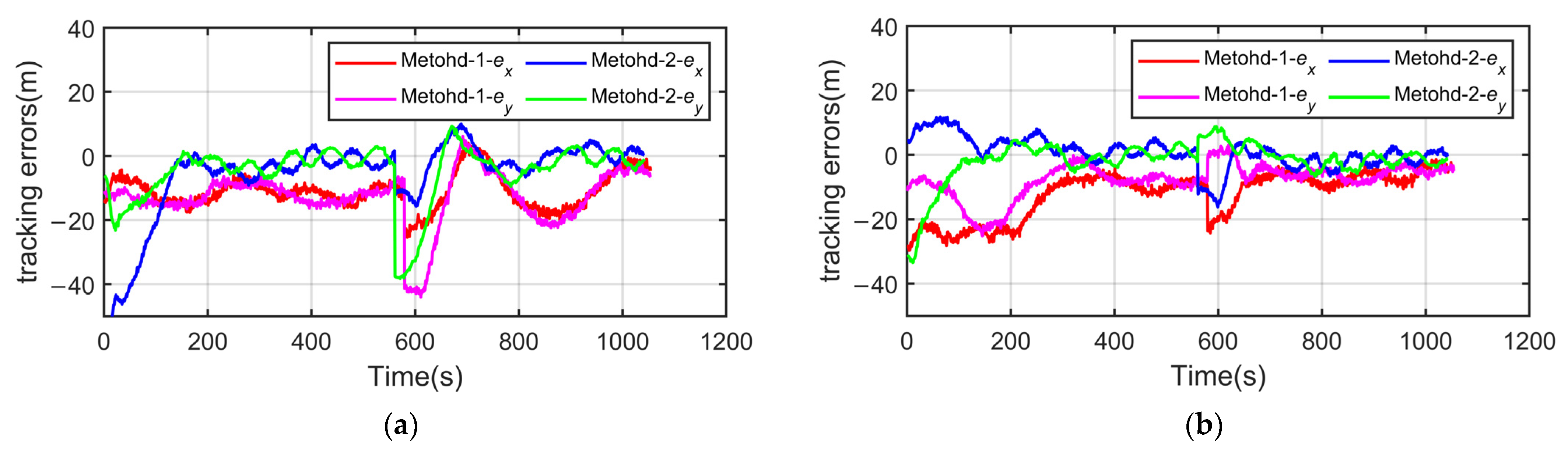
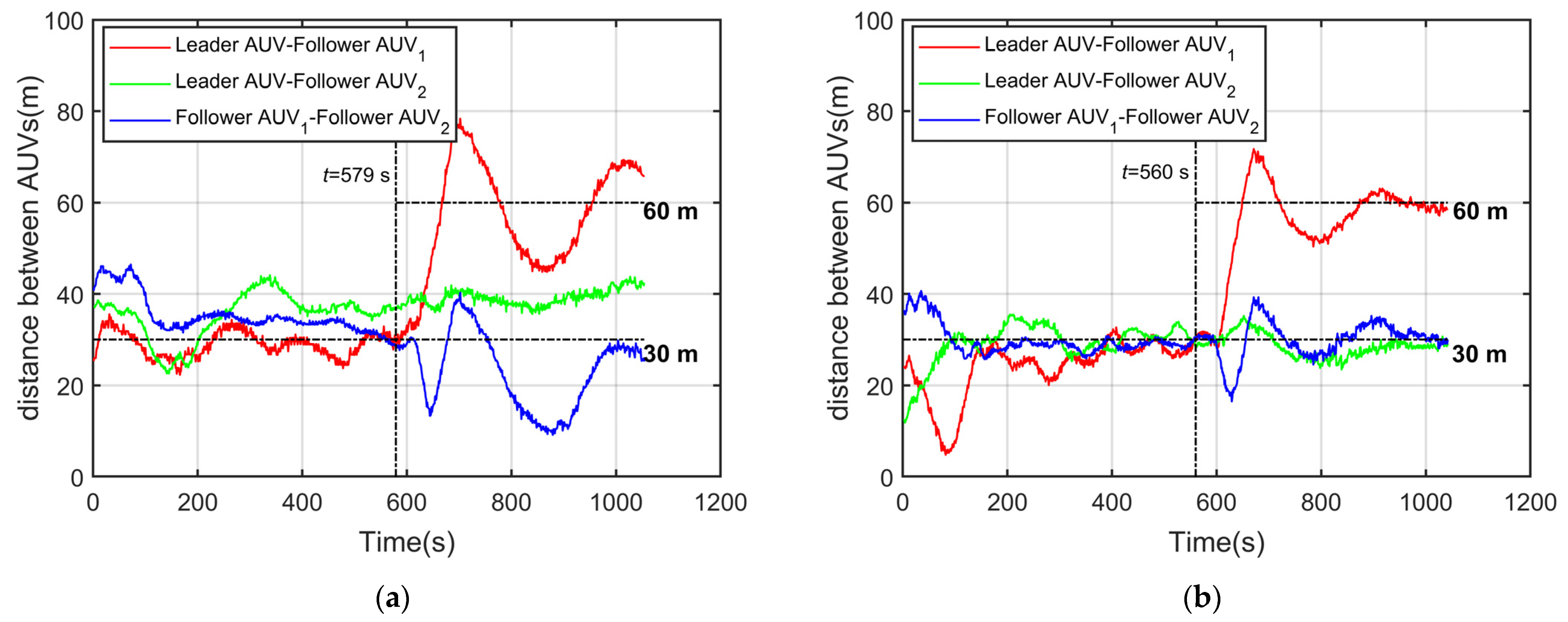
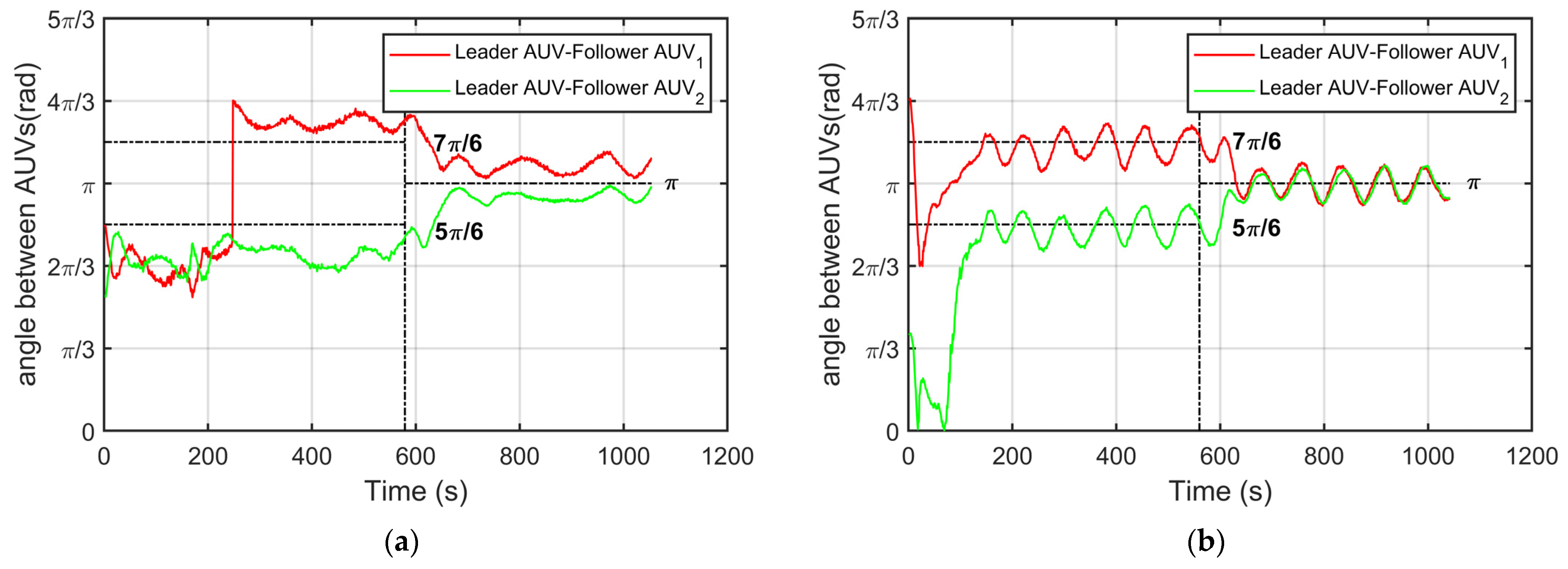
In this paper, the formation control of multiple AUVs under communication delay, packet discreteness and dropout has been investigated. The kernel density estimation and curve fitting methods have been used to solve the problem of communication constraints. Then a continuous and precise trajectory of the leader was generated for the followers. On this basis, a follower controller designed based on input–output feedback linearization can achieve accurate tracking of the leader. In this way, the formation control of multiple AUVs is realized. Simulation and field test results show that acoustic communication constraints have a great impact on formation control. However, the scheme presented can improve the accuracy and stability of formation control under an unsatisfactory communication environment. Therefore, the scheme proposed can be widely used in actual applications. For example, with this scheme, multiple AUVs can perform efficient and full coverage detection of underwater ecological environments or dangerous underwater targets. In addition, multiple AUVs equipped with different sensors can expel and even capture dangerous underwater targets through precise formation control. Furthermore, multiple AUVs can be used as mobile nodes in underwater communication networks. The movement of AUVs in a precise formation construction may improve the efficiency and coverage of communication networks. In conclusion, the formation control scheme presented in this paper can be applied to various underwater tasks, which will make some contribution to the field of ocean engineering.
Although the method in this paper has some practicability, it also ignores some potential problems. For example, model uncertainty and external disturbances such as ocean currents and obstacles are not considered, which to some extent affects the accuracy and stability of formation control and the safety of the AUVs when they move in a complex underwater environment. These problems have been studied by many researchers in recent years [
46,
47,
48,
49,
50]. Moreover, 3-D coordinated formation control, which can be used for more underwater missions, is not studied in this paper. In the future, the problem of formation control subject to them will be solved based on the research in this paper.


 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}