
A Novel Control Architecture Based on Behavior Trees for an Omni-Directional Mobile Robot




Abstract
:1. Introduction
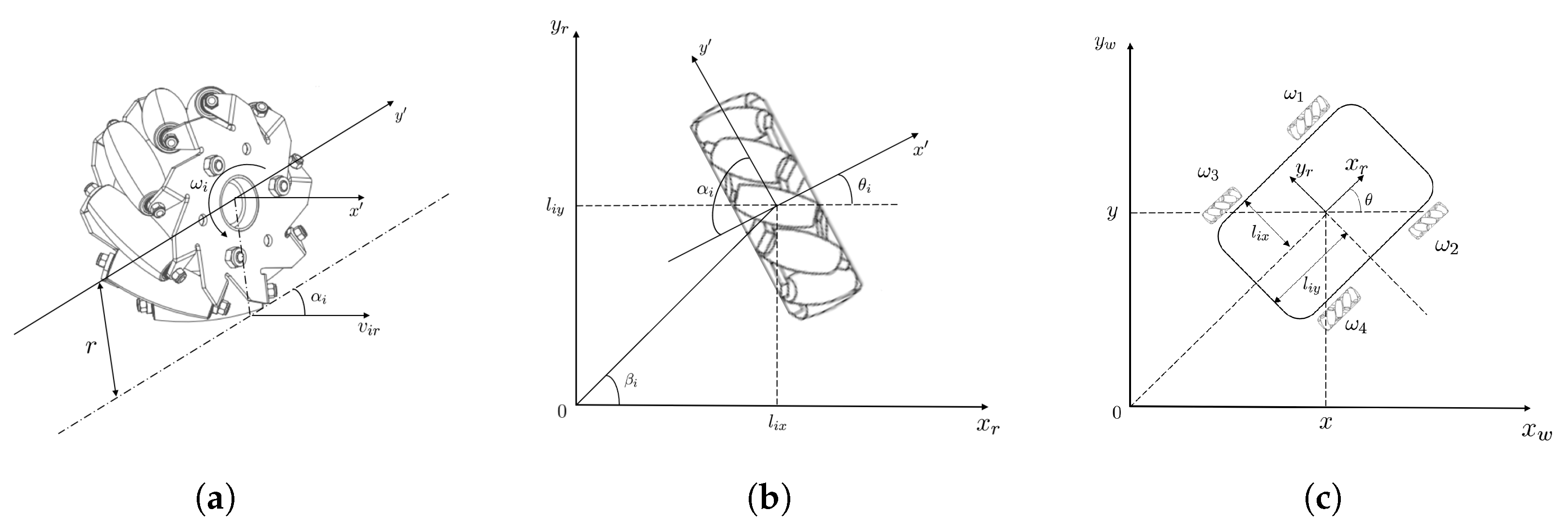
2. Robot Modeling
Kinematics Modeling
3. Proposed Control Architecture
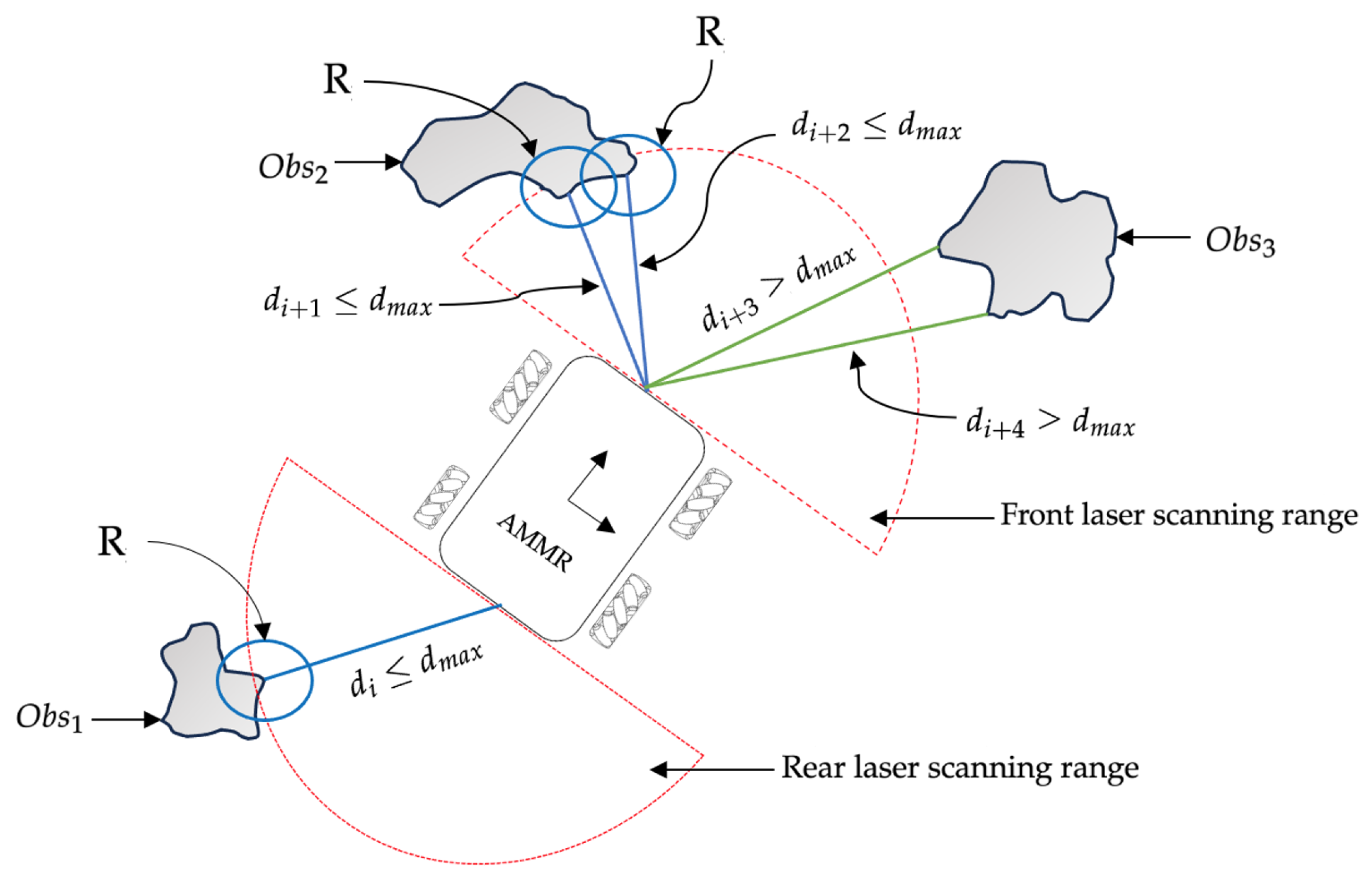
3.1. Detection of Obstacles for Collision Avoidance
3.1.1. Autonomous Obstacle Detection
3.1.2. Previously Known Obstacles
3.2. Controller Formulation
3.3. NMPC Implementation
3.4. Implementation in the ROS Environment
4. Simulation and Experimental Results
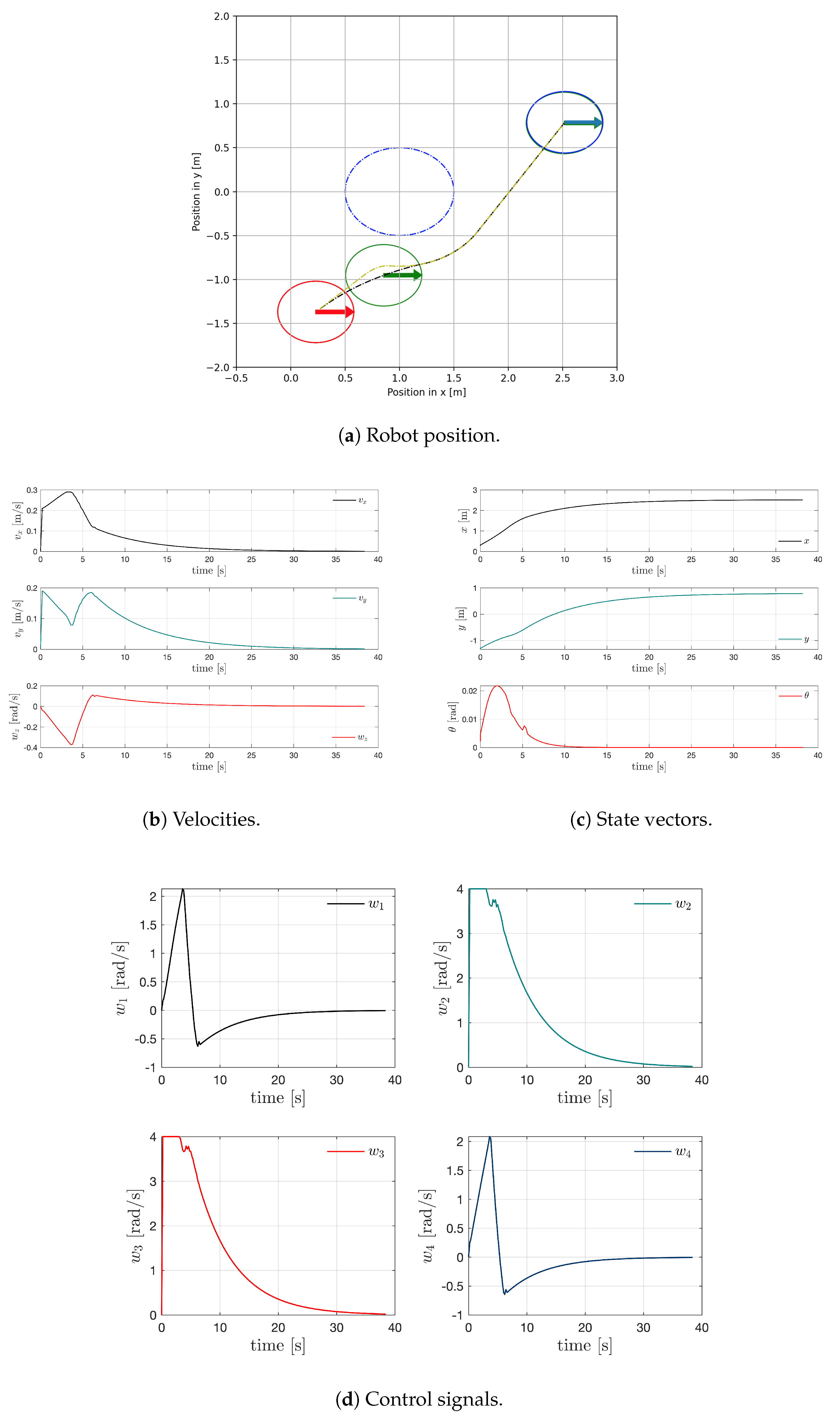
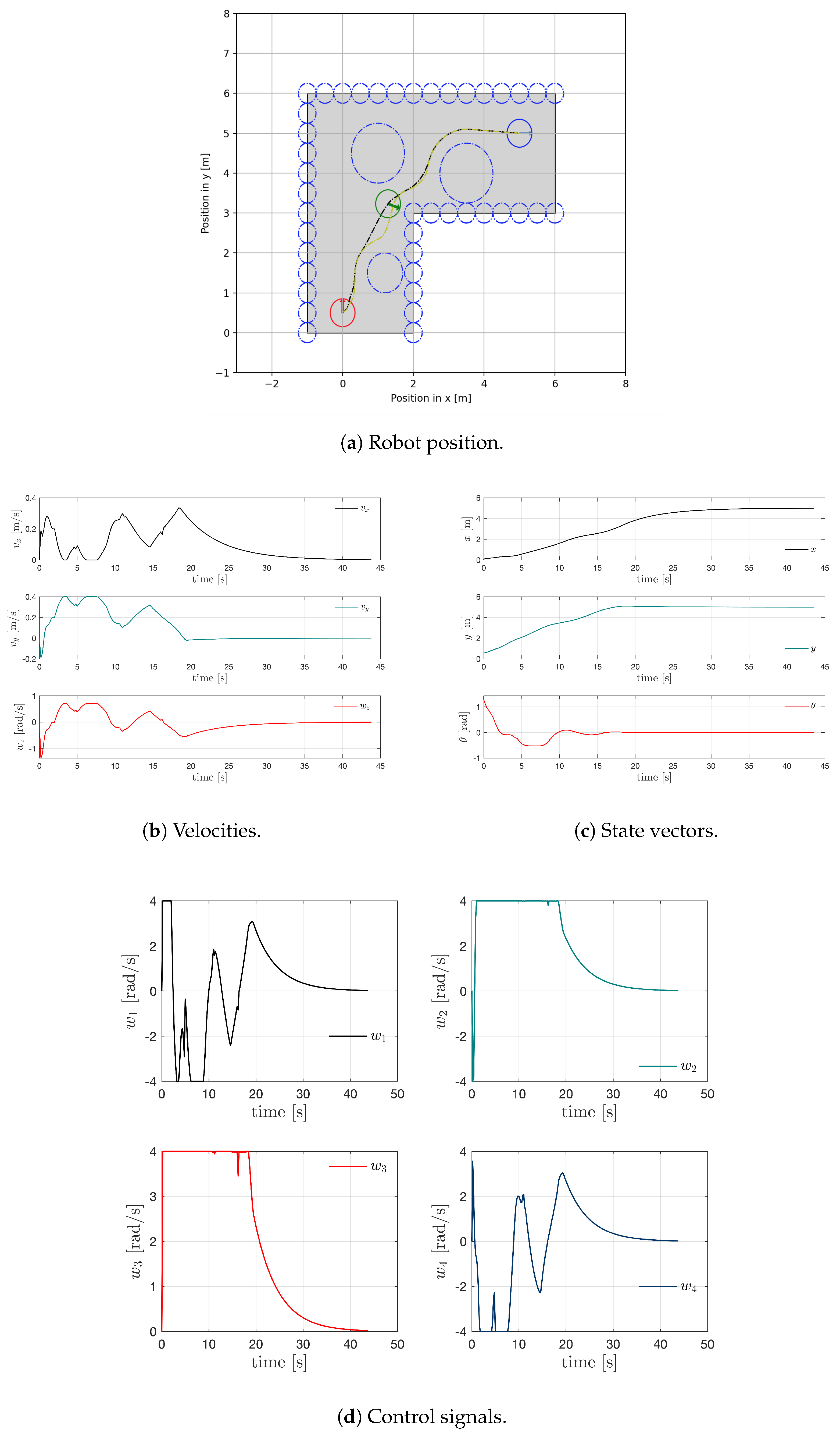
4.1. Simulation Results
4.2. Experimental Validation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bernardo, R.; Sousa, J.M.; Gonçalves, P.J. Survey on robotic systems for internal logistics. J. Manuf. Syst. 2022, 65, 339–350. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Simic, M. Sampling-based robot motion planning: A review. IEEE Access 2014, 2, 56–77. [Google Scholar] [CrossRef]
- Zhang, J.; Shao, X.; Zhang, W.; Na, J. Path-Following Control Capable of Reinforcing Transient Performances for Networked Mobile Robots Over a Single Curve. IEEE Trans. Instrum. Meas. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Hung, N.; Rego, F.; Quintas, J.; Cruz, J.; Jacinto, M.; Souto, D.; Potes, A.; Sebastiao, L.; Pascoal, A. A review of path following control strategies for autonomous robotic vehicles: Theory, simulations, and experiments. J. Field Robot. 2023, 40, 747–779. [Google Scholar] [CrossRef]
- Gu, D.; Hu, H. Receding horizon tracking control of wheeled mobile robots. IEEE Trans. Control Syst. Technol. 2006, 14, 743–749. [Google Scholar]
- Ye, H.; Wang, S. Trajectory tracking control for nonholonomic wheeled mobile robots with external disturbances and parameter uncertainties. Int. J. Control. Autom. Syst. 2020, 18, 3015–3022. [Google Scholar] [CrossRef]
- Azizi, M.R.; Keighobadi, J. Point stabilization of nonholonomic spherical mobile robot using nonlinear model predictive control. Robot. Auton. Syst. 2017, 98, 347–359. [Google Scholar] [CrossRef]
- Rösmann, C.; Makarow, A.; Bertram, T. Online motion planning based on nonlinear model predictive control with non-euclidean rotation groups. In Proceedings of the 2021 European Control Conference (ECC), Delft, The Netherlands, 29 June–2 July 2021; pp. 1583–1590. [Google Scholar]
- Zavala, V.M.; Biegler, L.T. The advanced-step NMPC controller: Optimality, stability and robustness. Automatica 2009, 45, 86–93. [Google Scholar] [CrossRef]
- Mehrez, M.W.; Mann, G.K.; Gosine, R.G. Stabilizing nmpc of wheeled mobile robots using open-source real-time software. In Proceedings of the 2013 16th International Conference on Advanced Robotics (ICAR), Montevideo, Uruguay, 25–29 November 2013; pp. 1–6. [Google Scholar]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Rojas, R.; Förster, A.G. Holonomic control of a robot with an omnidirectional drive. KI-Künstliche Intell. 2006, 20, 12–17. [Google Scholar]
- Masmoudi, M.S.; Krichen, N.; Masmoudi, M.; Derbel, N. Fuzzy logic controllers design for omnidirectional mobile robot navigation. Appl. Soft Comput. 2016, 49, 901–919. [Google Scholar] [CrossRef]
- Zijie, N.; Qiang, L.; Yonjie, C.; Zhijun, S. Fuzzy control strategy for course correction of omnidirectional mobile robot. Int. J. Control Autom. Syst. 2019, 17, 2354–2364. [Google Scholar] [CrossRef]
- Huang, J.T.; Chiu, C.K. Adaptive fuzzy sliding mode control of omnidirectional mobile robots with prescribed performance. Processes 2021, 9, 2211. [Google Scholar] [CrossRef]
- ** for mobile robotics tasks: A survey. Robot. Auton. Syst. 2015, 66, 86–103. [Google Scholar] [CrossRef]
- Bernardo, R.; Sousa, J.; Gonçalves, P.J. Planning robotic agent actions using semantic knowledge for a home environment. Intell. Robot. 2021, 1, 116–130. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | Wheel | ||||||
|---|---|---|---|---|---|---|---|
| 1 | l | ||||||
| 2 | l | ||||||
| 3 | l | ||||||
| 4 | l |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bernardo, R.; Sousa, J.M.C.; Botto, M.A.; Gonçalves, P.J.S. A Novel Control Architecture Based on Behavior Trees for an Omni-Directional Mobile Robot. Robotics 2023, 12, 170. https://doi.org/10.3390/robotics12060170
Bernardo R, Sousa JMC, Botto MA, Gonçalves PJS. A Novel Control Architecture Based on Behavior Trees for an Omni-Directional Mobile Robot. Robotics. 2023; 12(6):170. https://doi.org/10.3390/robotics12060170
Chicago/Turabian StyleBernardo, Rodrigo, João M. C. Sousa, Miguel Ayala Botto, and Paulo J. S. Gonçalves. 2023. "A Novel Control Architecture Based on Behavior Trees for an Omni-Directional Mobile Robot" Robotics 12, no. 6: 170. https://doi.org/10.3390/robotics12060170