1. Introduction
With climate change, resource depletion, greenhouse gases, it is obvious that the environmental situation of the planet has reached a critical stage. In order to cope with some of the crises that the planet is facing, a tremendous change in the transportation field is necessary. As a matter of fact, hybridization and electrification of vehicles’ powertrains have witnessed a huge growth in recent years. A key component of this electrified powertrain is the battery. Therefore, battery technologies have seen a consequent development, especially with Lithium Ion Batteries (LIB) [
1]. Since their emergence in the early 1990′s, the LIB cell represents the most promising and fastest growing battery technology in both low and high-power applications. A high specific energy (150–280 Wh·g
−1) [
2] combined with a high specific power (200–300 W·kg
−1) makes this technology the most attractive one for electrified powertrains. BCC Research reports that the LIB market is expected to reach USD 47.4 billion in 2023 with 15.8% annual growth [
3].
The growing market of Electric Vehicles (EV) and Hybrid Electric Vehicles (HEV) leads to a huge demand on high performing LIB but most of all long-lasting ones. Batteries are complex electrochemical components with nonlinear behaviors [
4]. Their performances depend heavily on internal and external conditions (aging, temperature, etc.). In order to keep track of these performances and battery states, an LIB pack is always equipped with a Battery Health Management system, part of the Battery Management System (BMS). The BMS is the main battery control system. Its role is to provide safe use of the battery and estimate, as accurately as possible, the main states of the battery system such as its State of Health (SOH) State of Power (SOP) and State of Charge (SOC) [
5,
6]. The SOC provides information about the current amount of energy stored in the battery. The SOP indicates the battery capability of providing the required power [
7,
8]. Meanwhile, the SOH is a figure of merit that indicates the battery level of degradation [
9,
10]. Due to the nonlinear complex behavior of the battery, estimating battery SOC, SOP and SOH can be very challenging, yet necessary. The battery SOH is attracting more and more attention. Estimating the battery SOH in real time is very important for automotive applications. It allows battery fault diagnosis and help prevent hazardous accidents. It provides accurate knowledge on the battery performance that can help manage the energy distribution in HEV and improve their consumption and lifetime [
11]. Most of all the real time SOH estimation allows an accurate estimation of the battery SOC and SOP. Additionally, it can be useful in terms of maintenance and replacement schedules.
Different approaches are used for battery state estimations. Regarding battery SOH estimation, there are three main indicators that define this state, the battery internal resistance, the battery impedance and its capacity. The battery capacity reflects the amount of energy the battery can store, while the internal resistance and impedance are indicators of its power capability. When it comes to hybrid applications, the battery’s power is of great interest, compared to EV where the battery energy is more crucial. Their health condition is therefore seen through power indicators such as the internal resistance and the impedance. These parameters change over the battery lifetime due to aging mechanisms. The battery SOH can be calculated using the ratio between the actual indicator value (capacity, impedance or resistance) and its initial one. At its End of Life (EoL), considering vehicular applications, the battery capacity can fade up to 20% while the internal resistance increases up to 160% of its initial value [
5] Therefore, tracking their changes is necessary to estimate the battery SOH. This tracking is, as mentioned previously, a very challenging task since the changes in both battery resistance and battery capacity find their origins in many different causes but also in the interactions between them. Several studies tracked back these origins in terms of internal battery degradation [
12]. The main causes appear to be the Solid Electrolyte Interface (SEI) formation [
13,
14] with lithium metal plating and loss of lithium in the active carbon area of the battery [
4,
15]. Moreover, changes in these SOH indicators can be caused by external conditions such as temperature changes and SOC level. Yet, these variations are often temporary and most of the time reversible; they don’t reflect adequately the continuous degradation of the battery health.
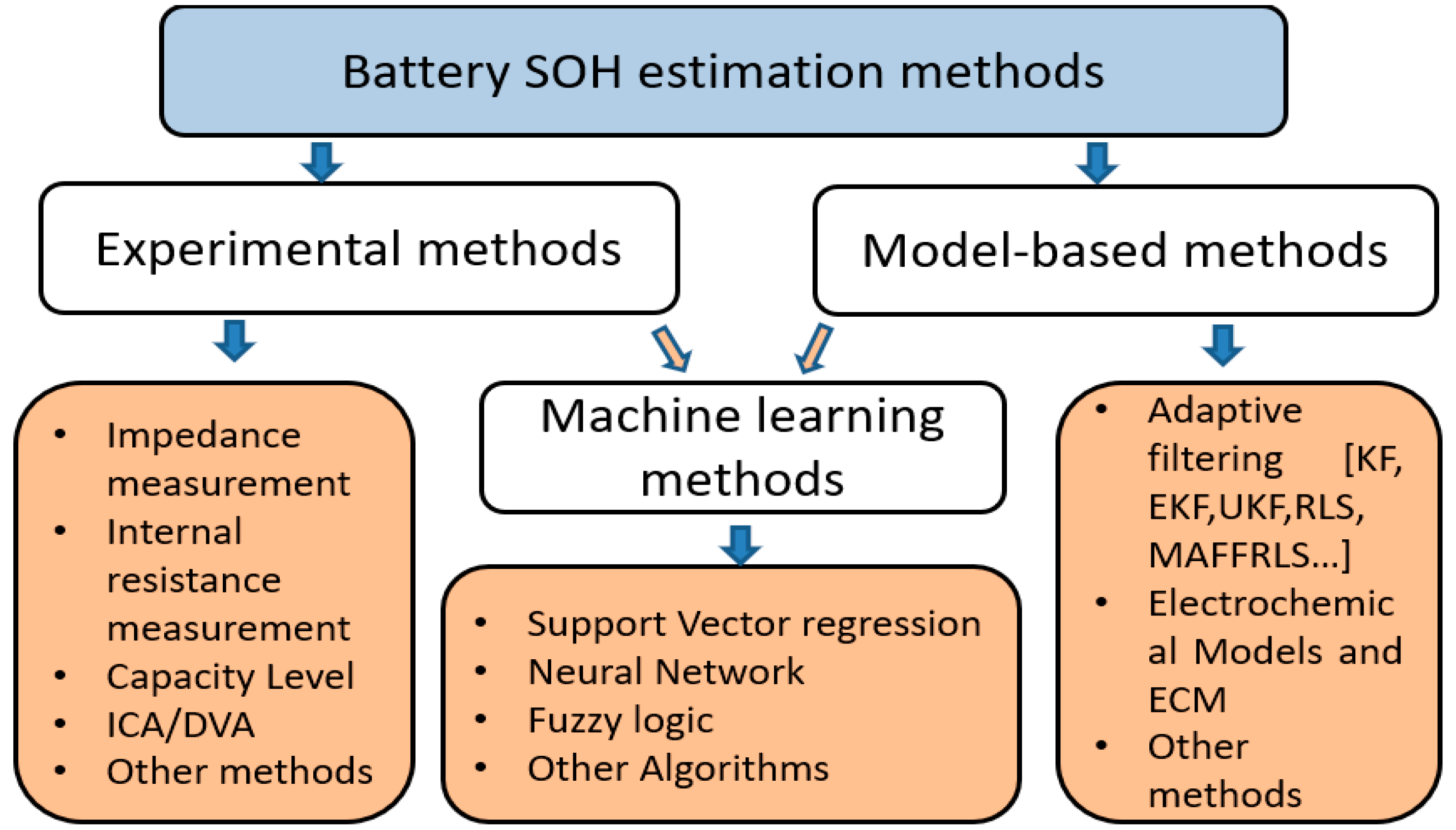
Considerable efforts are invested in battery SOH estimation to keep track of their performances and their remaining useful lifetime. Different methods are deployed to accurately identify the previously cited SOH indicators and reach an accurate battery SOH estimation. These methods can be listed in three main categories, shown in
Figure 1: Experimental methods, Model-based methods and, last but not least, Machine Learning methods. Machine learning methods stand as a combination of experimental methods and model-based ones; as a matter of fact, they make use of example data recorded from reel vehicles’ BMS as input data for training the machine learning model and extracting the battery degradation level. Several review studies have listed these methods pointing out their advantages and their drawbacks [
16,
17,
18,
19].
Regarding automotive applications, operating conditions change in real time (temperature for instance), making the real time feasibility of these identification processes very challenging. The model-based methods and the machine learning-based ones can meet the requirements of online and onboard applications. The experimental-based methods require a considerable amount of time and a high cost to be conducted which makes them less suited for real time applications [
16,
20]. Since the list of existing methods in terms of SOH estimation provided in the literature is very wide, a qualitative review that focuses on the key automotive challenges is necessary. The main purpose of this review is to highlight the strengths and weaknesses of the latest and main battery SOH estimation techniques in terms of real time applications. An experimental validation of the presented, real time compatible, SOH estimation methods is conducted. This experimental validation takes into consideration a real driving cycle with a dynamic current profile. The results of this experimental validation are used to highlight the compatibility of these methods with automotive applications.
Therefore, this paper is organized as follows, the next section presents a review of the main experimental-based SOH estimation methods. Model-based SOH estimation methods are presented in
Section 3. In
Section 4, machine learning estimation methods are reviewed; they stand as a combination of experimental and model-based methods. Experimental testing and validation results are provided and analyzed in
Section 5. Finally, a conclusion is made in
Section 6.
3. Review of Model-Based SOH Estimation METHODS
The SOH, as mentioned previously, is a figure of merit that indicates the level of degradation of the battery. Its calculation, however, cannot be conducted through direct measurements. It needs to be estimated using SOH indicators that are the battery capacity, its resistance or its impedance (some research lists the battery impedance and internal resistance as the same indicator, yet since the methods used to estimate them are different this work has listed them separately). Due to their real time feasibility, a huge interest, in automotive research, has been given lately to model-based methods for estimating these indicators and evaluating the battery SOH. These methods use models that describe the battery behavior considering SOH indicators. In order to estimate the battery states and their performances, these indicators are identified. Several methods are provided in the literature that allow the identification of these indicators. The main model-based methods for SOH estimations are reviewed in this section.
3.1. Kalman-Based FILTERS
A common model-based method to estimate the battery SOH is adaptive filtering. Several adaptive algorithms have been used in the literature to identify in real time the parameters of different battery Equivalent circuit models (ECM), which includes the battery internal resistance, in order to track the battery SOC and SOH. Kalman filter-based methods (Kalman Filter (KF), Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF), Dual EKF, etc.) have been widely used to estimate battery states and parameters [
39,
40,
41,
42]. In a series of three papers [
43,
44,
45], the author investigates the SOC and parameter estimation of a lithium ion polymer battery pack using Kalman Filtering. The benefits of using EKF over the classical KF stand in the linearization process to deal with nonlinear models as explained in [
43], the first paper of this series. In [
46], the author presents a battery state and parameter estimation based on a UKF algorithm. Through the estimation of the battery’s internal resistance, the SOH is accurately predicted.
3.2. Least Square-Based FILTERS
Other widely used algorithms in adaptive filtering are the Least Square-based ones [
47,
48,
49,
50,
51]. A lot of attention has been given recently to these algorithms and especially to the Recursive Least Square (RLS) due to its simple implementation and accuracy. This algorithm gives an accurate estimation of battery parameters that are directly linked to battery states such as the Open Circuit Voltage (OCV) for battery SOC, and internal resistance for battery SOH. This identification process and state estimation have been investigated in [
52] where the importance of the battery model is clearly pointed out. The author in [
48] indicates the high performances of an improved RLS-based algorithm, the Multi Adaptive Forgetting Factors RLS (MAFFRLS). In the MAFFRLS algorithm, the forgetting factor is optimized through Particle Swarm Optimization (PSO) algorithm to reach a higher accuracy parameter estimation.
3.3. Observers
Observers have also been used as an adaptive identification method for SOH estimation [
53,
54]. In [
54], the author uses a sliding mode observer to estimate both SOC and SOH for a lithium ion battery. The accuracy of this method is clearly presented alongside its robustness against modeling error and temperature variations
3.4. Simplified Electrochemical Models
Electrochemical Models (EM) are complex models that tend to represent the battery behavior accurately [
55]. They are often based on nonlinear differential equations. Yet those models can be simplified and combined with adaptive filtering instead of ECM for SOH estimation. The identification of electrochemical parameters allows the SOH estimation. In [
56], the author simplifies a battery EM before identifying two battery SOH indicators, the internal resistance and the diffusion time, using online recursive parameter identification. In [
57], the author introduces a high level battery EM that predicts the remaining capacity of a battery SOC. This EM takes into account the effects of the temperature and the cycle aging. This technique can be used to estimate the battery maximum capacity level to reach the battery SOH. The main drawbacks of these EMs are in the complexity of the equations that they require. Satisfying accuracy in predicting the battery behavior can be reached using less complex models such as ECMs.
3.5. Other Methods
The battery SOH can also be estimated using other model-based methods than the ones presented before. One of the most frequent is the use of optimization algorithms to identify model parameters that are SOH indicators. In [
58], the author investigates the correlation between the battery diffusion capacitance and its SOH through experimental measurements. Then, an optimization algorithm, a Genetic Algorithm (GA), is used to estimate the diffusion capacitance of a battery ECM. The main drawback of these optimization algorithms is their high computational time compared to other model-based estimation methods such as adaptive filtering.
These presented model-based methods benefit from an easy implementation and a fast processing. They require simple structures and are relatively accurate and robust in terms of parameter identification. Their main limitation exists in the fact that they heavily rely on the used battery model and its accuracy and level of complexity. Compared to adaptive filters and observers, electrochemical models provide more physical meaning about the battery ageing process and allow the estimation of both the battery capacity and internal resistance. However, the structure of these models is relatively more complicated than the ECMs used for adaptive filtering and observer. Moreover, their computational time and cost are higher. The reviewed model-based methods are listed in
Table 2 with their advantages and disadvantages.
4. Review of Machine Learning Methods: A Combination of Models and Experimental Data
These methods represent a combination between experimental and model-based ones. In fact, they use training data, measurements and models in the learning process to estimate the battery SOH.
Several machine learning algorithms can be found in the literature to perform the battery SOH prognostics [
32,
59,
60,
61,
62,
63]. In [
64], the author uses Support Vector Regression (SVR) to estimate the battery Remaining Useful Life (RUL) and takes it into consideration in the energy management strategy of a Fuel cell Hybrid Electric Vehicle (FC-HEV). This prognostic is carried out on-board the vehicle using example data measured in the laboratory but also real time measurements. This SVR algorithm is used in [
65] to estimate the battery SOH using training data acquired offline through EIS. Another interesting machine learning method that is widely used in the literature is the fuzzy logic-based one. In [
66], the author combines EIS and fuzzy logic data analysis to estimate the SOH of a Lead Acid battery. The Gaussian process algorithm is also often used in machine learning approaches; Khalegi et al. [
67] make use of this algorithm and show its accuracy to trace the SOH of an LIB using training data from WLTC profiles. Neural Networks are one of the most popular algorithms used to process training data and measured data in machine learning. In [
68], the author proposes an SOH estimation method based on a Back Propagation Neural Network (BPNN) based on the battery internal parameters and battery’s interval capacity. The SOH estimation provided by this method has an error margin of (−1.5%, 1.5%). In [
69], the author provides a SOH estimation method combining EIS measurements and Neural Networks. An improved Neural Network algorithm used in machine learning process is presented in [
62] where the author compares an innovative extreme learning machine algorithm based on a single layer feed forward Neural Network to a traditional BPNN. This innovative algorithm produces better results in terms of operation speed and estimation accuracy than the traditional BPNN, however it requires an important amount of training data at different operating conditions. Another example of a Neural Network algorithm is given in [
70] where the author introduces a variant long-short-term memory Neural Network (LSTM-NN). This algorithm is tested experimentally and provides accurate results in terms of SOH estimation (RMS 0.0216) and RuL prediction (CE 0.0831). A Particle filter-based algorithm is used in [
71] to setup a machine learning process for battery SOH estimation. The performances of the machine learning algorithms depend, for vehicular applications, on their computational, cost their accuracy and, most of all, on the amount of data they require for the training process. NN algorithms, for instance, require less data than Fuzzy logic ones, however they face more difficulties with nonlinear and complex systems [
5]. The reviewed machine learning based methods are listed in
Table 3 with their advantages and disadvantages.
The SOH estimation approach based on machine learning presents very interesting results with quite high accuracy. Yet, unless a significant amount of data from real electric vehicles and hybrid electric vehicles under different operating conditions and for different battery types are available, this estimation technique is hard to conduct. In order to make it feasible and realistic, a common database between several manufacturers needs to be shared with data from hundreds of thousands of vehicles.
5. Battery SOH Estimation Using Model-Based RLS Algorithm
Based on the qualitative comparison of SOH estimation methods, shown in
Table 4, experimental-based methods appear to be difficult for real time BMS applications. On another hand, model-based and machine learning approaches benefit from a real-time onboard implementation that is required in automotive applications. Both these categories provide simple structures, accurate estimation and an easy implementation. However, machine learning-based methods depend on real electric vehicle and hybrid electric vehicle data which are not easily accessible yet. Moreover, they can become unreliable when confronting new operating conditions which have not been included in their training process [
9,
17]. Therefore, model-based SOH methods seem to be more practical. Among the discussed model-based methods, adaptive filtering provides interesting results in terms of accuracy, simplicity and computational feasibility; it meets the requirements of real-time applications. They use ECMs that allow a direct identification of the battery internal resistance [
72]. This parameter is, as mentioned before, an SOH indicator. Compared to the battery capacity this SOH indicator can be reached directly using ECMs. Moreover, this indicator is of great interest in estimating the battery Power capability (SOP) [
73] depending on its SOH, especially for hybrid applications, such as FC-HEV, where the battery is the main power source and therefore its energy capacity is less relevant than its power. A variety of adaptive filters, such as the Kalman filter (KF), and recursive least square (RLS), have been utilized in this domain. When it comes to adaptive filtering based on a Kalman algorithm, it is more appropriate to use relatively complex versions, such as EKF or UKF rather than the classical KF in state estimation owing to the battery nonlinear behavior [
39]. As mentioned in
Section 3.1, the classical KF finds it difficult to face the nonlinear systems, therefore improved versions (EKF, UKF) have been developed and used for this purpose. On the other hand, an RLS algorithm combined with ECM has been the center of attention in many studies mainly due to its simplicity and satisfying accuracy. This algorithm provides a direct estimation of battery parameters, with high accuracy and low complexity. This estimation, on one hand, allows the SOH estimation through the battery internal resistance. On another hand, it improves the EMS in hybrid applications by updating all the model parameters. Consequently, among model-based estimation methods, the RLS algorithm is a good candidate to illustrate the real-time feasibility of this onboard SOH estimation. This adaptive filter is selected, based on its performances compared to the other methods, to present an example of battery SOH estimation for real time automotive applications.
To validate the performance and compatibility of this SOH identification method in real time vehicular applications, a series of tests are conducted in this section. First, using a battery simulated model, the battery internal resistance is identified online, and its value is compared to the model’s one. Then an experimental test bench is setup to validate this identification process. The real battery resistance is measured using a highly accurate experimental method and used as a reference to validate the accuracy of the online identification process. A dynamic current profile is employed to highlight the compatibility of this SOH estimation method with real vehicular applications.
5.1. Simulation of Battery Internal Resistance Identification Using RLS Algorithm
In order to conduct the simulation study properly, an accurate battery model [
74] used to reproduce the battery behavior is considered. The mathematical equations of the model are described as follows:
- ➢
Charge model:
where
Ebatt: Non-linear Voltage (V);
E0: Constant Voltage (V);
K: Polarization Resistance (Ω);
i*: Low frequency current (A);
i: Battery current (A);
it: Extracted capacity (Ah);
Q: Maximum battery capacity (Ah);
A: Exponential Voltage (V);
B: Exponential Capacity (Ah
−1)
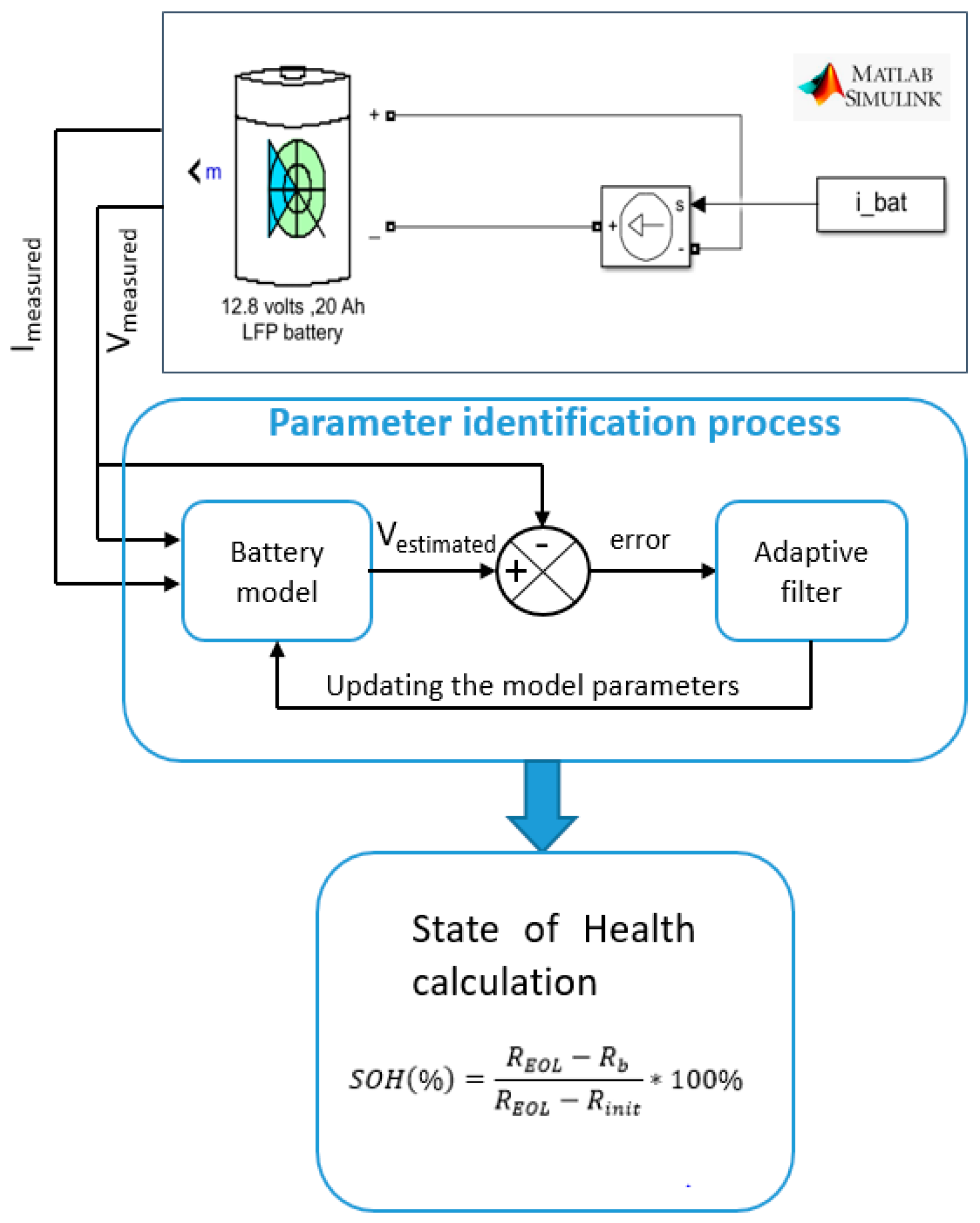
This dynamic model is simulated using the Matlab/Simulink software. The simulated model takes into account several battery parameters. The characteristics of this battery simulated model are given in
Table 5. The identification process is described in in
Figure 2.
Battery modeling is a key element in the online identification process. The more accurate the battery model used the more accurate the parameter identification will be. As a matter of fact, the identification process using an adaptive filter with a second order battery ECM will provide more accurate results in parameter estimation than the same adaptive filter used with a simple battery model (Zero Order ECM). Yet, complex models may lead to higher computational time. Battery ECMs are commonly used in model-based estimation methods. They are developed from internal battery parameters such as the resistance and the Open Circuit Voltage. The accuracy and complexity of these ECMs are directly linked to their order. The first order battery ECM is dominant in the literature, its good compromise between accuracy and simplicity has been strongly proven [
75].
The RLS algorithm is used with this first order ECM to identify in real time the battery parameters and specifically the internal resistance. This internal resistance is used as a health indicator to track the battery SOH in real time. This health indicator is chosen over the battery capacity due to the fact that it appears directly in the battery ECM parameters. This indicator is relevant when it comes to the power capability of the battery which is an important aspect to consider in EMS for HEV [
11,
76]. When it comes to identifying the battery capacity, more complex models are required (EM). The internal resistance of the battery is though a parameter that changes, as mentioned previously, permanently with aging but also in a reversible way with operating conditions. In order to be a relevant indicator of the battery SOH, the estimation of this parameter needs to be conducted under particular conditions. The value of this resistance tends to increase for SOC levels under 60% and with extreme temperatures (hot and cold ones). Therefore, in order to make sure that this estimated resistance adequately reflects the SOH level of the battery, these factors need to be controlled. The resistance estimation is required to be conducted at a temperature around 25 °C and for a SOC level higher than 70% (Which is often the case in hybrid applications). This way, the resistance value will only be influenced by the level of battery degradation and indicates adequately its SOH level.
The structure of this algorithm is the following:
where
is the estimated function,
is a vector of estimated parameters,
U(k) is a vector of known functions,
G(k) is the Kalman gain,
P(k) is the inverse correlation matrix of the input vector.
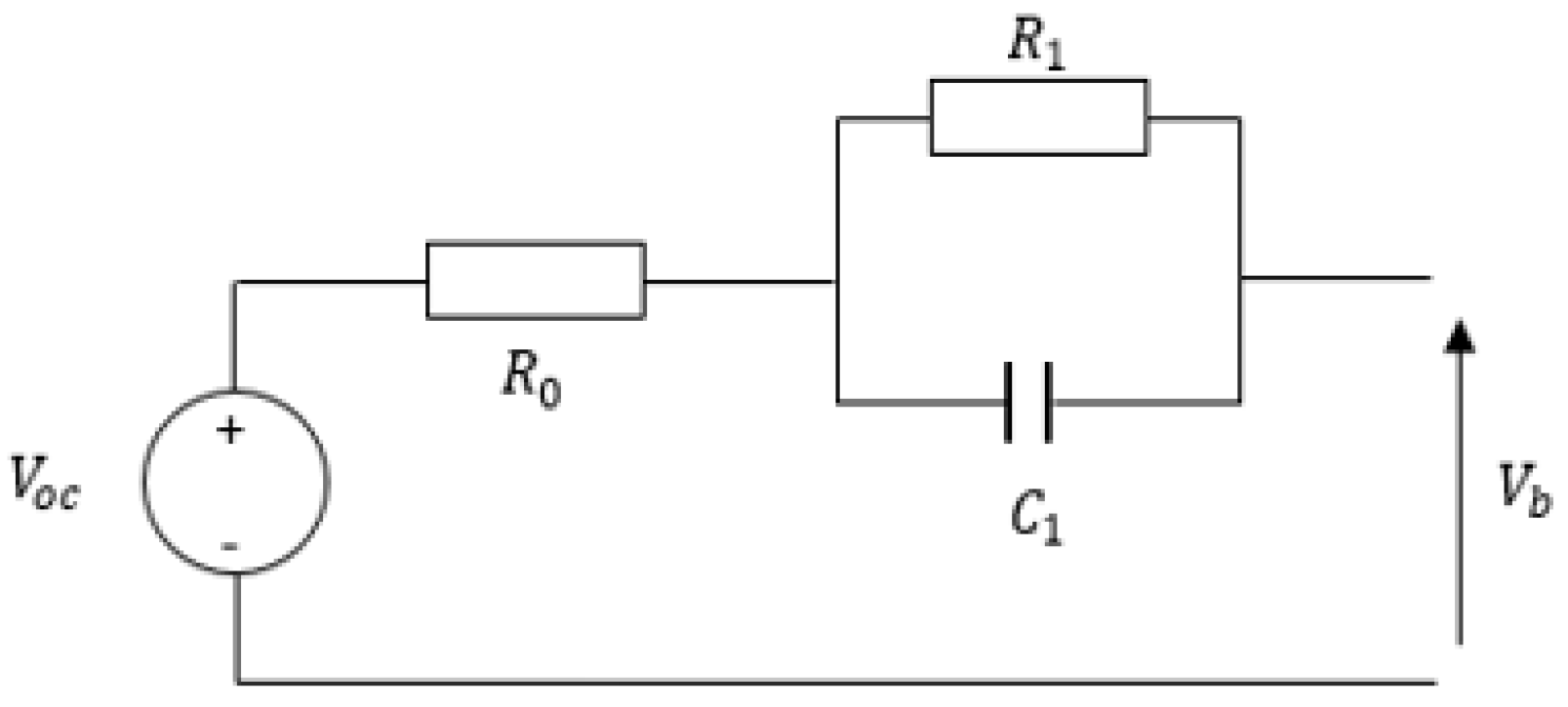
In the first order ECM,
Figure 3, an
RC network that represents the diffusion phenomenon is considered. Considering the battery behavior and the first order ECM, the battery internal resistance for this ECM is equal to
Rb = R0 + R1.
The identification process takes place as follows:
where
is the battery measured current,
the battery estimated voltage and W the estimated parameters that are in this case
that represent the battery internal resistance (
Rb) and
the battery open circuit voltage.
The internal resistance is identified in real time with the RLS filter for the three ECM using current and voltage measurement. The SOH is defined, as cited previously, as the ratio between the indicator current value and its initial one; in this case the indicator is the battery internal resistance identified by the RLS filter as shown in Equation (11).
where
REOL represents the battery end of life (EOL) internal resistance. This
REOL is chosen as 160% of the initial battery internal resistance
Rinit, considering the fact that the battery end of life is indicated in several power applications by a decrease of 60% in its maximum power [
77]
Rb is the battery internal resistance estimated in real time.
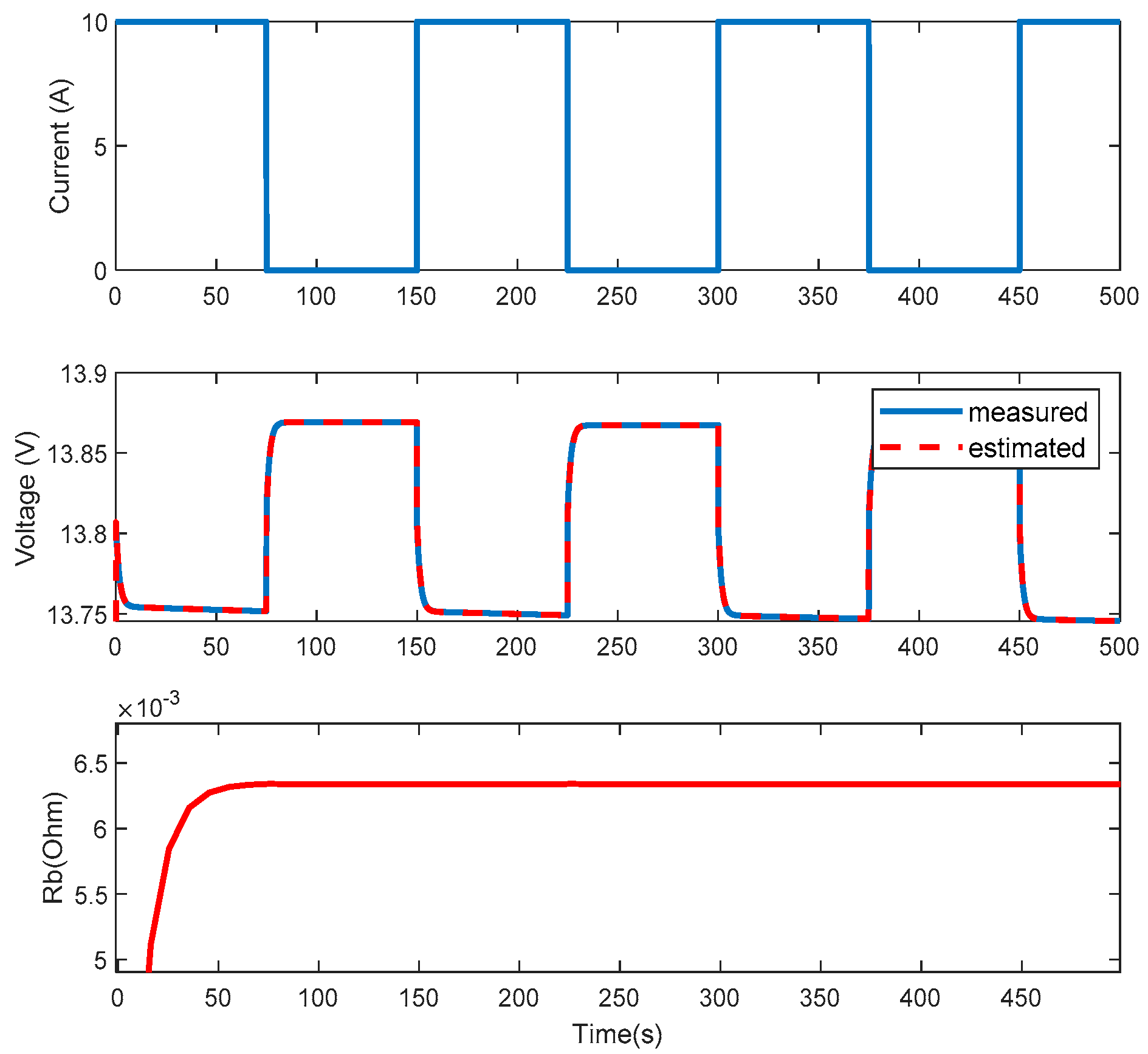
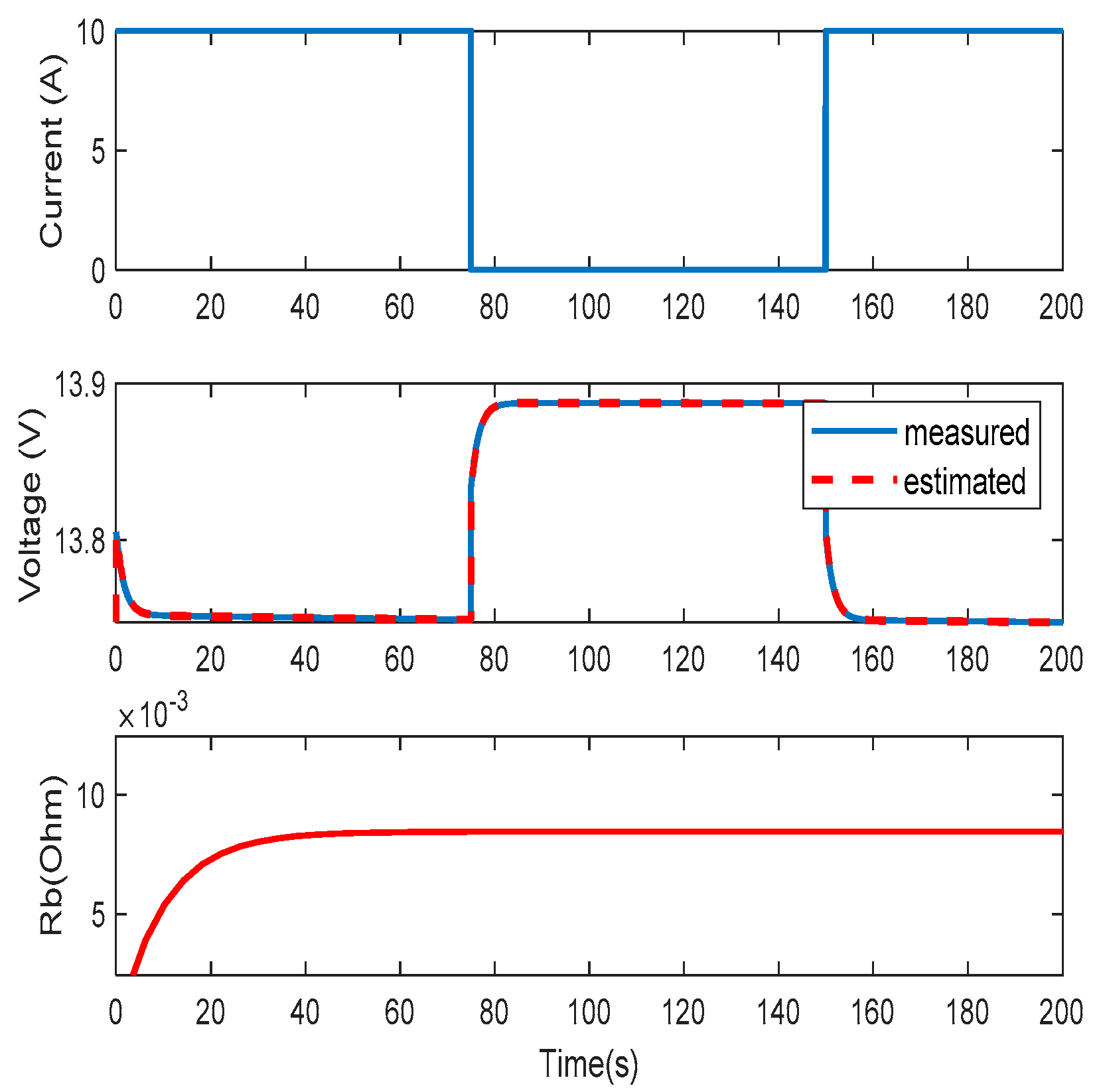
First, the battery is discharged under a pulse current profile as shown in
Figure 4. The RLS-based parameter identification is conducted in real time. The battery internal resistance estimation is also presented in
Figure 4. Based on these simulations, it is clear that the parameter identification process is functional. The battery internal resistance is estimated accurately. The short convergence time of this identification (~20 s) its accuracy and its low computational cost, as shown in the simulation results, meet the requirements of real time applications. By considering these results, it can be concluded that the Model-Based SOH estimation method using the RLS adaptive filter is functional and adequate for a real time application. This method estimates the battery internal resistance with a high accuracy and with a low convergence time (less than 40 s).
The battery simulated is considered new with an SOH equal to one. To shed light on the validity of this identification process, an aged battery is used in the simulation presented in
Figure 5. The internal resistance is identified accurately with a value of 0.0085 Ω. This resistance leads, using the Equation (3), to an SOH estimation of 0.45 (45%). The battery degradation level is estimated here using the SOH indicator identified in real time.
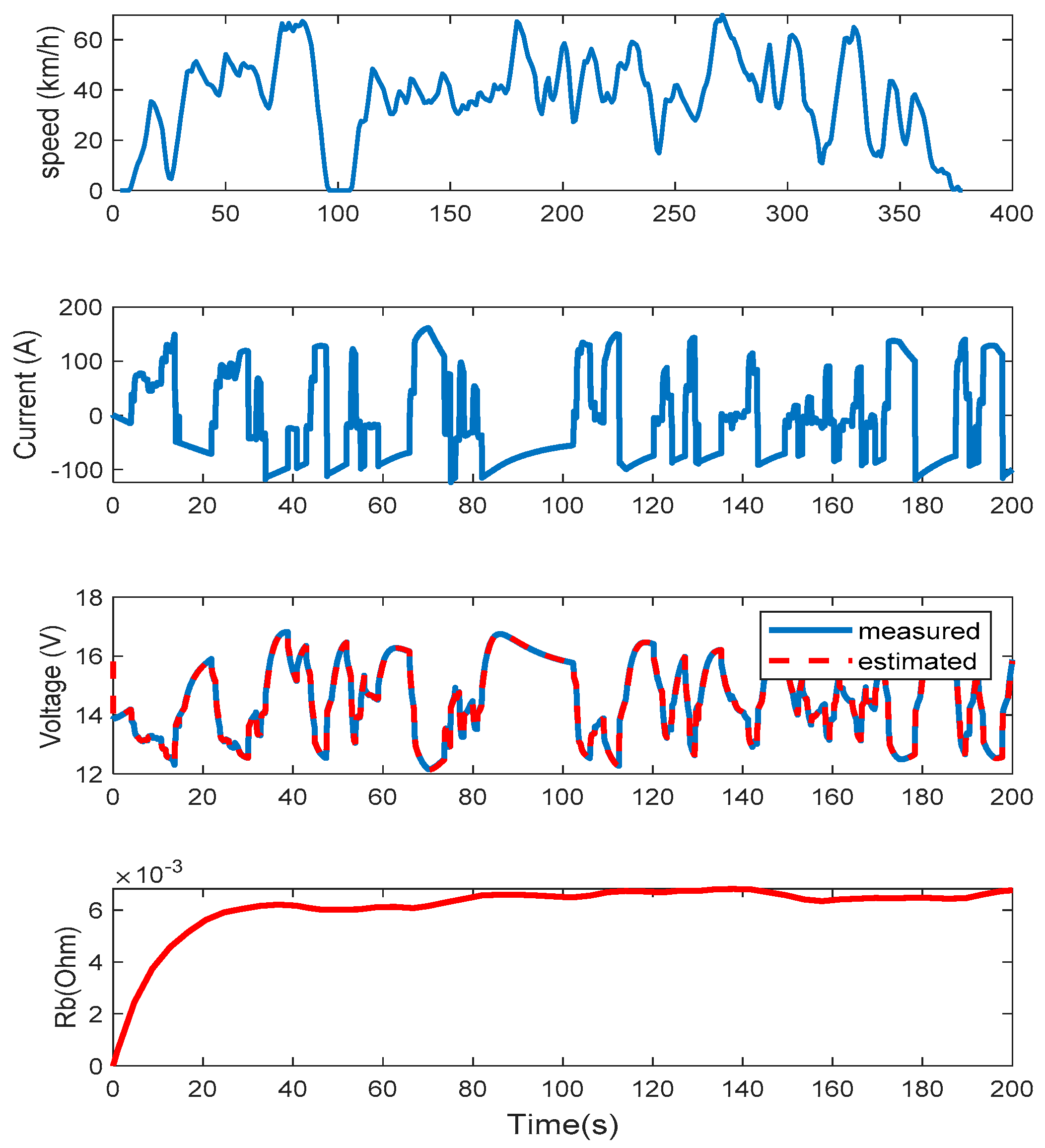
In order to cope with the requirements of real transportation applications, the identification process is simulated under a dynamic current profile. This current profile corresponds to a real driving cycle provided in [
78] and shown in
Figure 6. The simulated battery model is discharged under the dynamic profile current corresponding to this driving cycle and the internal resistance is estimated using the three battery ECM. The results of this estimation are presented in
Figure 6. Once again, the simulation results show that the Model-based SOH estimation method using the RLS adaptive filter functions well and is suited for real time SOH estimation. Even with a dynamic current profile, the estimation is accurate and the battery ECM is simple and easy to implement for real time applications.
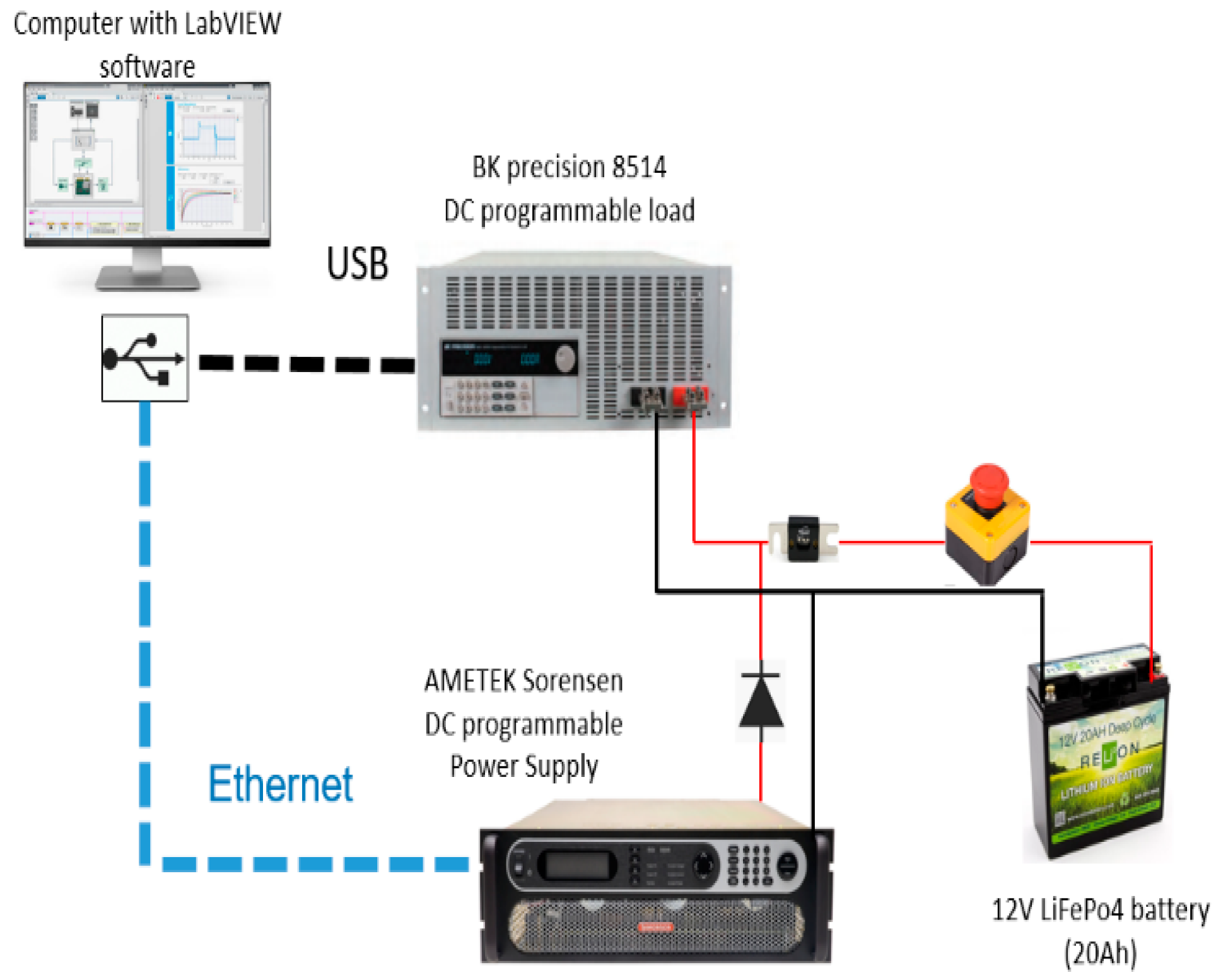
5.2. Experimental Validation of the SOH Estimation Process
In order to validate these results and make sure that the proposed online identification process works adequately, an experimental test is required. The battery SOH will be estimated through the battery internal resistance online identification. A real LiFePo4 lithium ion battery is considered. The test bench set up at the Hydrogen Research Institute is presented in
Figure 7.
First the battery internal resistance is measured experimentally using the current pulse method. This method is based on the Ohm’s Law. It measures the voltage drop of the battery for a given current, and then calculates the battery’s internal resistance, as follows [
24]:
where
Rb stands for the battery internal resistance,
OCV its Open Circuit Voltage,
Vbat its voltage and
Ipulse the current applied. This method is widely used in laboratories to define the battery internal resistance behavior in different working conditions with a very high accuracy. Even though this experimental method is known to be very time consuming, it provides highly accurate resistance measurements and will represent the reference in the validation of the online battery SOH estimation process.
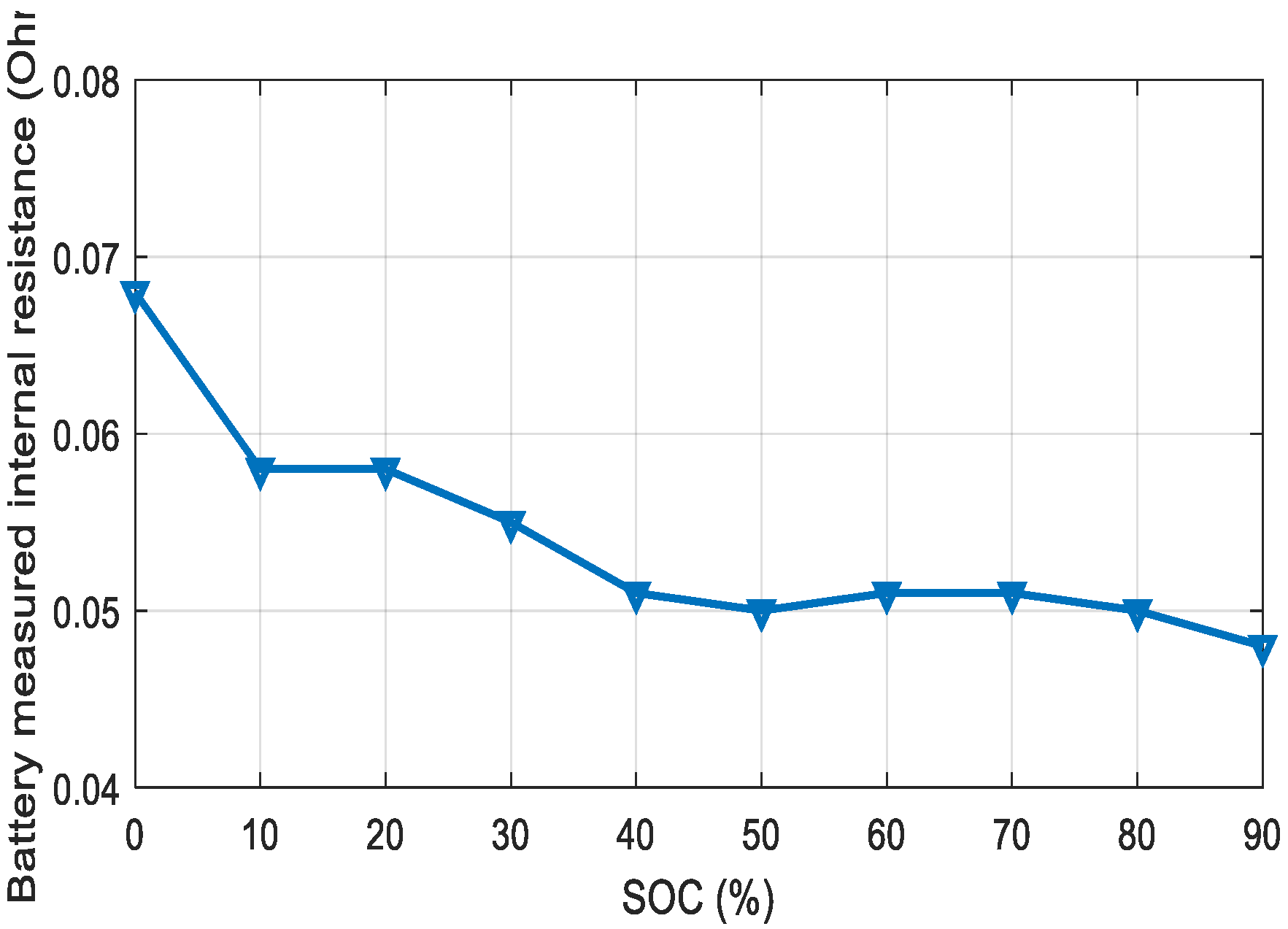
The battery internal resistance is measured using the current pulse method, 10 A pulses are considered and the relaxation time to reach the equilibrium for the OCV measurement is one hour. The ambient temperature for this experiment is constant and equal to 21 °C. The measured internal resistance is presented in
Figure 8. In automotive applications and especially Hybrid Electric Vehicles, the battery SOC is limited most of the time to use between 90% and 50%. For this SOC range, the battery internal resistance appears to be constant and its measured value is approximately 0.05 Ω.
This measured value is considered the reference for the online battery internal resistance identification. The LiFeP04 lithium ion battery is now discharged with a constant current profile. This profile takes into consideration current pulses of 10 A. Its voltage and current are measured in real time and used with the adaptive filtering method to identify the battery internal resistance. The identification process is carried out experimentally and the results are shown in
Figure 9. The battery internal resistance value estimated with the online identification process matches with the reference measured value. The convergence time in this test is quite important due to the lack of information received by the RLS algorithm. The current pulse is short, therefore the accurate resistance value is only reached after the second pulse.
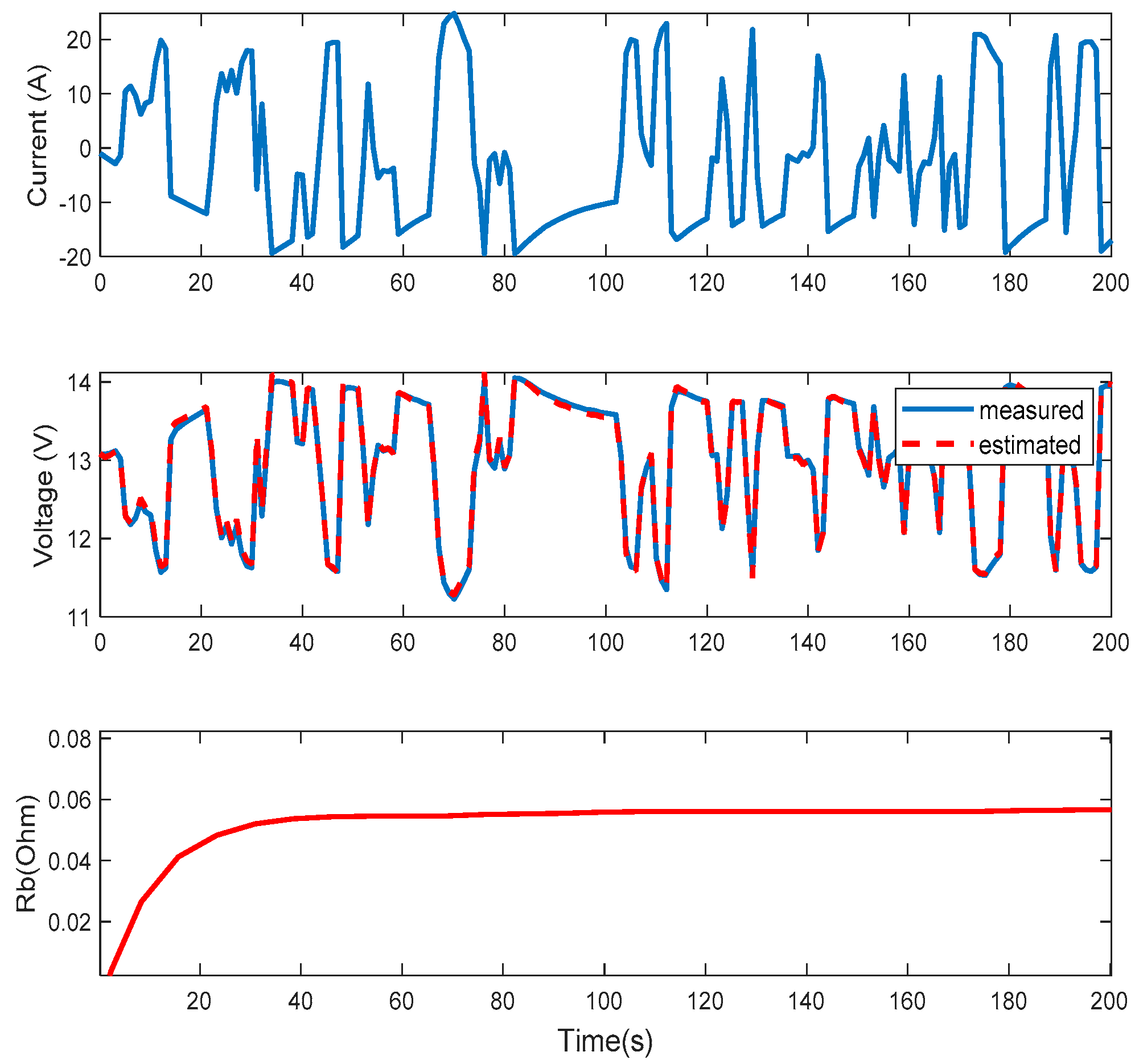
In order to give pertinent results that cope with real automotive applications, this identification process is experimentally tested under a real driving cycle, as shown in
Figure 6. The LiFePo4 lithium ion battery is considered with an initial SOC of 70%. The ambient temperature is the same as for the reference internal resistance measurement, 21 °C. The results of this experimental validation are presented in
Figure 10. The identification process is able to estimate the battery internal resistance with high accuracy and under a low convergence time. The estimated value for the internal resistance meets the measured one, 0.05 Ω. This value was reached after only 50 s of convergence. This duration is very satisfying in SOH estimation considering the slow variation of the internal resistance with battery aging.
The identification results indicate the aptitude of the model-based estimation method using the RLS filter to identify the battery internal resistance in real time. This resistance represents an important SOH indicator. Its current identified value is used to estimate the SOH as follows:
The Rb identified by the online estimation process is equal to Rinit. In fact, the battery considered is a new one, therefore its SOH is 100%. In case of degradation due to aging, the identified value of Rb will increase which will lead to a lower SOH estimation.
6. Conclusions
In this paper, a review of the main battery SOH estimation methods suited for automotive real time applications, and especially hybrid electric ones, is given. Different indicators that allow SOH estimation are presented. Battery internal resistance is an indicator of great interest in terms of hybrid applications. This indicator reflects the battery degradation related to its power capability. The main categories of estimation methods, experimental methods, model-based methods and machine learning methods are presented and compared based on their key advantages and limitations in terms of real time automotive applications. Due to their accuracy and compatibility with on-board and online applications, model-based methods are highlighted. They present a satisfying accuracy in terms of real time SOH indicator identification. The effective functioning of these method and their compatibility with real time applications are shown through experimental testing. Using the RLS adaptive filter as an example of a model-based estimation method associated with a first order battery ECM, the battery internal resistance is identified. For both constant and dynamic current profiles, experimental results for the real time identification are very accurate.
This review provides the latest research achievements in terms of real-time battery SOH estimation. Future works on energy management strategies for hybrid vehicles can consider these real time estimation methods to keep track of battery model parameters in real-time and improve the system’s performances and lifetime.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}